OpenCV移植到ARM全过程-III
->目录
在上一篇文章里面我们已经交叉编译好了opencv的第三方依赖库,并且解压好了opencv源码。现在开始正式的交叉编译opencv源码。
进入opencv源码目录下,上一篇在源码的的根目录下建立了2个文件夹build和output,进入build目录下。
cd build
运行cmake的GUI程序,在命令行下输入cmake-gui然后按照下列图那样配置。
cmake-gui
Where is the source code和Where to build the binaries分别选择源码目录和源码目录下的build目录,然后点击Configure。

在弹出的窗口按如下配置,点击Next。

按照如下配置,Openrating System要写成Linux,不能写成arm-linux或者其他,因为cmake不能识别系统arm-linux,你可以试一下写成其他,这样在配置好的输出信息中会提示无法识别XXX系统。Compilers选择arm-linux-gcc和arm-linux-g++的绝对路径即可,Target Root选择$OPENCV_3THPARTY_LIB也就是/usr/local/arm/opt/FriendlyARM/toolschain/4.4.3/arm-none-linux-gnueabi/,其他的按照如下以下配置即可。

比如我不需要编译TIFF模块,就在Search下搜索WITH_TIFF,去掉勾选即可。

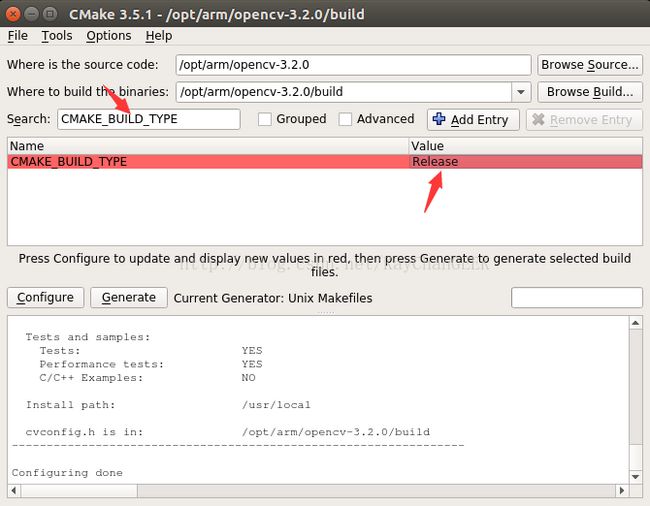
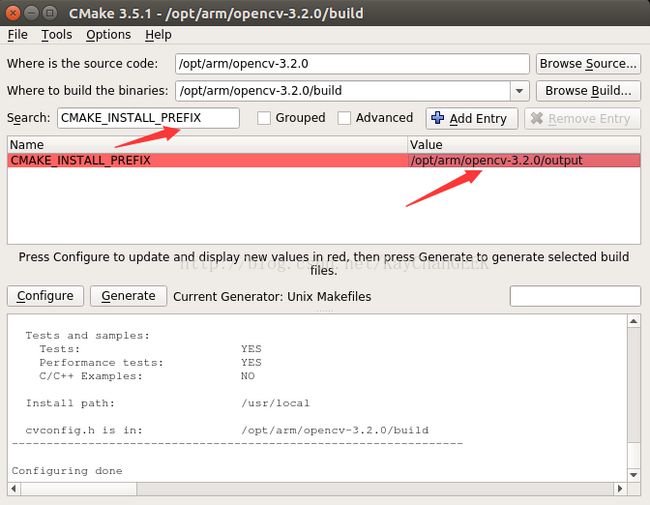
同样的方法去掉WITH_GTK,或者你不需要的模块。然后再搜索CMAKE_BUILD_TYPE,将这个键的值改成Release,搜索CMAKE_INSTALL_PREFIX,将这个键的值改成源码目录下的output文件夹,如下图所示:
然后点击Generate生成Makefile。
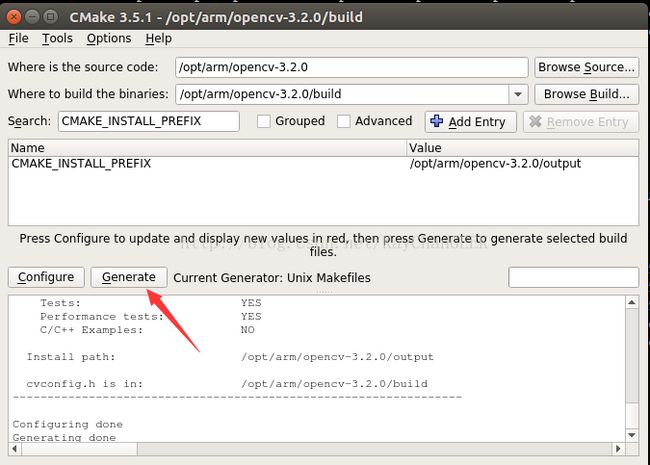
到此已经生成了初步配置的Makefile,关闭cmake。按理说现在应该进行make然后make install操作,但是会发现在make过程中会报错。
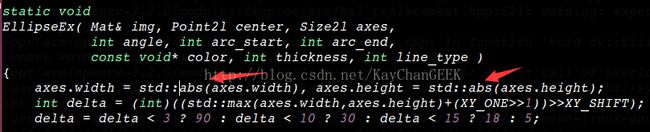
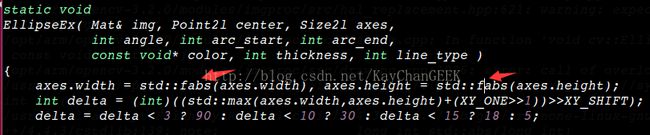
报错【1】

解决方案是打开该文件定位到错误行,将abs改成fabs,再编译即可,如下图所示:
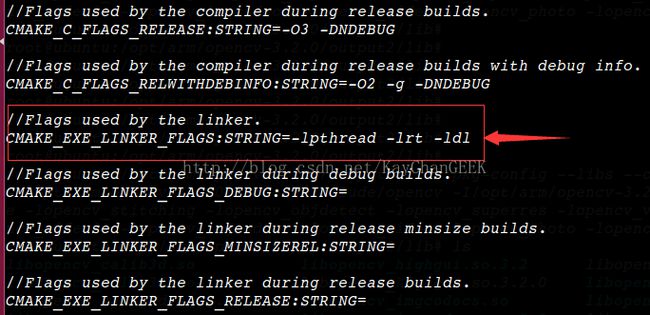
报错【2】
具体是啥忘记截图了,大概就是说找不到pthread等系列函数。
解决方案是在build目录下打开CMakeCache.txt文件,找到CMAKE_EXE_LINKER_FLAGS,在其后面加上-lpthread -lrt -ldl链接属性,如下图所示:
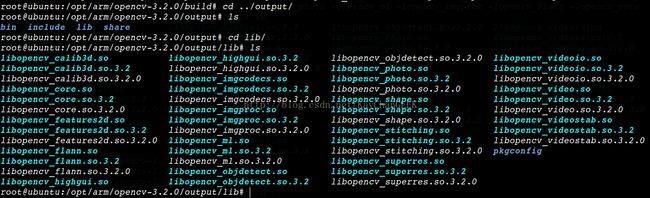
改好后保存继续make,如果过程中继续报错继续改之即可,我没再遇到报错的了,顺利完成,然后make install安装。现在可以在output目录下看到交叉编译好的库和文件,如下图:
好了,都编译完成了,接下来就是写个小demo测试一下了。
arm_cv_demo.cpp
#include
#include
int main(){
cv::Mat image = cv::imread("shuaige.png");
cv::namedWindow("shuaige");
cv::imshow("shuaige",image);
cv::waitKey(5000);
return 0;
} vim /etc/ld.so.conf
将目录/opt/arm/opencv-3.2.0/output/lib添加到文件末尾
ldconfig -v
export PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/opt/arm/opencv-3.2.0/output/lib/pkgconfig
pkg-config --libs --cflags opencv
这时候看到输出信息如下图,说明pkg-config配置成功(注:/etc/ld.so.conf文件的作用可以参考这篇文章)。
arm-linux-g++ -o arm_cv_demo arm_cv_demo.cpp `pkg-config --cflags --libs opencv`
输出的可执行文件是ARM架构的,成功,嘻嘻,结果如下图:

好了,下一步就是将编译好的库和可执行文件搞到ARM上运行,可惜板子还在快递的路上,等到了再继续开搞。万事俱备,只欠板子。