默认4条路径,其中动态规划很重要两个参数P1,P2是这样设定的:
P1 =8*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
P2 = 32*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
cn是图像的通道数, SADWindowSize是SAD窗口大小,数值为奇数。
可以看出,当图像通道和SAD窗口确定下来,SGBM的规划参数P1和P2是常数。
四、后处理
opencvSGBM的后处理包含以下几个步骤:
Step1:唯一性检测:视差窗口范围内最低代价是次低代价的(1 + uniquenessRatio/100)倍时,最低代价对应的视差值才是该像素点的视差,否则该像素点的视差为0。其中uniquenessRatio是一个常数参数。
Step2:亚像素插值:
插值公式:

Step3:左右一致性检测:误差阈值disp12MaxDiff默认为1,可以自己设置。
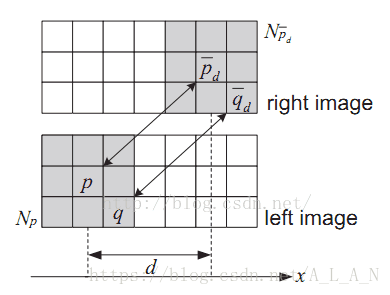
OpencvSGBM计算右视差图的方式:
通过得到的左视察图计算右视差图
第二部分:opencv中SGBM算法的参数含义及数值选取
一、 预处理参数
1:preFilterCap:水平sobel预处理后,映射滤波器大小。默认为15
int ftzero =max(params.preFilterCap, 15) | 1;
opencv测试例程test_stereomatching.cpp中取63。
二 、代价参数
2:SADWindowSize:计算代价步骤中SAD窗口的大小。由源码得,此窗口默认大小为5。
SADWindowSize.width= SADWindowSize.height = params.SADWindowSize > 0 ?params.SADWindowSize : 5;
注:窗口大小应为奇数,一般应在3x3到21x21之间。
3:minDisparity:最小视差,默认为0。此参数决定左图中的像素点在右图匹配搜索的起点。int 类型
4:numberOfDisparities:视差搜索范围,其值必须为16的整数倍(CV_Assert( D % 16 == 0 );)。最大搜索边界= numberOfDisparities+ minDisparity。int 类型
三 、动态规划参数
动态规划有两个参数,分别是P1、P2,它们控制视差变化平滑性的参数。P1、P2的值越大,视差越平滑。P1是相邻像素点视差增/减 1 时的惩罚系数;P2是相邻像素点视差变化值大于1时的惩罚系数。P2必须大于P1。需要指出,在动态规划时,P1和P2都是常数。
5:opencv测试例程test_stereomatching.cpp中,P1 = 8*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
6:opencv测试例程test_stereomatching.cpp中,P2 = 32*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
四、后处理参数
7:uniquenessRatio:唯一性检测参数。对于左图匹配像素点来说,先定义在numberOfDisparities搜索区间内的最低代价为mincost,次低代价为secdmincost。如果满足

即说明最低代价和次第代价相差太小,也就是匹配的区分度不够,就认为当前匹配像素点是误匹配的。
opencv测试例程test_stereomatching.cpp中,uniquenessRatio=10。int 类型
8:disp12MaxDiff:左右一致性检测最大容许误差阈值。int 类型
opencv测试例程test_stereomatching.cpp中,disp12MaxDiff =1。
9:speckleWindowSize:视差连通区域像素点个数的大小。对于每一个视差点,当其连通区域的像素点个数小于speckleWindowSize时,认为该视差值无效,是噪点。
opencv测试例程test_stereomatching.cpp中,speckleWindowSize=100。
10:speckleRange:视差连通条件,在计算一个视差点的连通区域时,当下一个像素点视差变化绝对值大于speckleRange就认为下一个视差像素点和当前视差像素点是不连通的。
opencv测试例程test_stereomatching.cpp中,speckleWindowSize=10。
第三部分:C++实现
#include
#include
using namespace std;
using namespace cv;
const int imageWidth = 672; //摄像头的分辨率
const int imageHeight = 376;
Size imageSize = Size(imageWidth, imageHeight);
Mat grayImageL,grayImageR;
Mat rectifyImageL, rectifyImageR;
Rect validROIL;//图像校正之后,会对图像进行裁剪,这里的validROI就是指裁剪之后的区域, 其内部的所有像素都有效
Rect validROIR;
Mat mapLx, mapLy, mapRx, mapRy; //映射表
Mat Rl, Rr, Pl, Pr, Q; //校正旋转矩阵R,投影矩阵P 重投影矩阵Q
Mat xyz; //三维坐标
Point origin; //鼠标按下的起始点
Rect selection; //定义矩形选框
bool selectObject = false; //是否选择对象
int numberOfDisparities = ((imageSize.width / 8) + 15) & -16;
int numDisparities = 6;
cv::Ptr sgbm = StereoSGBM::create(0, 16, 3);
Mat cameraMatrixL = (Mat_(3, 3) << 350.11095, 0, 339.81480,
0, 349.39869, 200.42205,
0, 0, 1);
Mat distCoeffL = (Mat_(5, 1) << -0.16028, 0.00600, -0.00009, -0.00047, 0.00000);
Mat cameraMatrixR = (Mat_(3, 3) << 351.08207, 0, 343.68828,
0, 350.19118, 210.18586,
0, 0, 1);
Mat distCoeffR = (Mat_(5, 1) << -0.17678, 0.02713, -0.00033, -0.00109, 0.00000);
//左右目之间的R,t可通过stereoCalibrate()或matlab工具箱calib求得
Mat T = (Mat_(3, 1) << -119.61078, -0.06806, 0.08105);//T平移向量
Mat rec = (Mat_(3, 1) << 0.00468, 0.02159, 0.00015);//rec旋转向量
Mat R;//R 旋转矩阵
Mat frame, f1, f2;
Mat disp, disp8;
/*****立体匹配*****/
void stereo_match(int, void*)
{
sgbm->setPreFilterCap(32);
int SADWindowSize = 9;
int sgbmWinSize = SADWindowSize > 0 ? SADWindowSize : 3;
sgbm->setBlockSize(sgbmWinSize);
int cn = rectifyImageL.channels();
sgbm->setP1(8 * cn*sgbmWinSize*sgbmWinSize);
sgbm->setP2(32 * cn*sgbmWinSize*sgbmWinSize);
sgbm->setMinDisparity(0);
sgbm->setNumDisparities(numberOfDisparities);
sgbm->setUniquenessRatio(10);
sgbm->setSpeckleWindowSize(100);
sgbm->setSpeckleRange(32);
sgbm->setDisp12MaxDiff(1);
sgbm->setMode(cv::StereoSGBM::MODE_SGBM);
sgbm->compute(rectifyImageL, rectifyImageR, disp);//输入图像必须为灰度图
disp.convertTo(disp8, CV_8U, 255 / ((numDisparities * 16 + 16)*16.));//计算出的视差是CV_16S格式
reprojectImageTo3D(disp, xyz, Q, true); //在实际求距离时,ReprojectTo3D出来的X / W, Y / W, Z / W都要乘以16(也就是W除以16),才能得到正确的三维坐标信息。
xyz = xyz * 16;
imshow("disparity", disp8);
}
/*****描述:鼠标操作回调*****/
static void onMouse(int event, int x, int y, int, void*)
{
if (selectObject)
{
selection.x = MIN(x, origin.x);
selection.y = MIN(y, origin.y);
selection.width = std::abs(x - origin.x);
selection.height = std::abs(y - origin.y);
}
switch (event)
{
case EVENT_LBUTTONDOWN: //鼠标左按钮按下的事件
origin = Point(x, y);
selection = Rect(x, y, 0, 0);
selectObject = true;
cout << origin << "in world coordinate is: " << xyz.at(origin) << endl;
break;
case EVENT_LBUTTONUP: //鼠标左按钮释放的事件
selectObject = false;
if (selection.width > 0 && selection.height > 0)
break;
}
}
/*****主函数*****/
int main()
{
Rodrigues(rec, R); //Rodrigues变换
//经过双目标定得到摄像头的各项参数后,采用OpenCV中的stereoRectify(立体校正)得到校正旋转矩阵R、投影矩阵P、重投影矩阵Q
//flags-可选的标志有两种零或者 CV_CALIB_ZERO_DISPARITY ,如果设置 CV_CALIB_ZERO_DISPARITY 的话,该函数会让两幅校正后的图像的主点有相同的像素坐标。否则该函数会水平或垂直的移动图像,以使得其有用的范围最大
//alpha-拉伸参数。如果设置为负或忽略,将不进行拉伸。如果设置为0,那么校正后图像只有有效的部分会被显示(没有黑色的部分),如果设置为1,那么就会显示整个图像。设置为0~1之间的某个值,其效果也居于两者之间。
stereoRectify(cameraMatrixL, distCoeffL, cameraMatrixR, distCoeffR, imageSize, R, T, Rl, Rr, Pl, Pr, Q, CALIB_ZERO_DISPARITY,
0, imageSize, &validROIL, &validROIR);
//再采用映射变换计算函数initUndistortRectifyMap得出校准映射参数,该函数功能是计算畸变矫正和立体校正的映射变换
initUndistortRectifyMap(cameraMatrixL, distCoeffL, Rl, Pr, imageSize, CV_32FC1, mapLx, mapLy);
initUndistortRectifyMap(cameraMatrixR, distCoeffR, Rr, Pr, imageSize, CV_32FC1, mapRx, mapRy);
VideoCapture cap(0);
cap.set(CAP_PROP_FRAME_HEIGHT, 376);
cap.set(CAP_PROP_FRAME_WIDTH, 1344);
namedWindow("disparity", CV_WINDOW_AUTOSIZE);
namedWindow("paramemnt", CV_WINDOW_NORMAL);
createTrackbar("numDisparities:\n", "paramemnt", &numDisparities, 20, stereo_match);
setMouseCallback("disparity", onMouse, 0);
while (1)
{
cap >> frame;
imshow("video", frame);
f1 = frame.colRange(0, 672);
f2 = frame.colRange(672, 1344);
cvtColor(f1, grayImageL, CV_BGR2GRAY);
cvtColor(f2, grayImageR, CV_BGR2GRAY);
//然后用remap来校准输入的左右图像
//interpolation-插值方法,但是不支持最近邻插值
remap(grayImageL, rectifyImageL, mapLx, mapLy, INTER_LINEAR);
remap(grayImageR, rectifyImageR, mapRx, mapRy, INTER_LINEAR);
stereo_match(0, 0);
waitKey(1);
}
waitKey(0);
return 0;
}
运行效果:
参考:
Accurate and Efficient Stereo Processing by Semi-Global Matching and Mutual Information
opencvSGBM半全局立体匹配算法的研究(1)
semi-global matching 算法总结
密集匹配之半全局匹配SGBM
【OpenCV】双目测距(双目标定、双目校正和立体匹配)
双摄像头立体成像(三)-畸变矫正与立体校正
双目立体匹配经典算法之Semi-Global Matching(SGM)概述:匹配代价计算之Census变换(Census Transform,CT)(附计算C代码)