2017-2042美国国防部无人系统路线图
路线图背景、目的及内容
美国国防部已经在所有的作战环境中使用无人系统,为确保国防部相关投资真正用于推进无人系统技术和作战使用,于2018年8月30日发布了《2017—2042财年无人系统综合路线图》(简称2042年路线图)。该路线图是美国国防部公开发布的第五版(2007—2032年,2009—2034年,2011—2036年,2013—2038年,2017—2042年)无人系统综合路线图,是在2038年路线图基础上的进一步延伸,旨在进一步将无人系统整合到作战体系,明确相关的投资领域,以确保各军种的无人系统发展目标及工作与国防部规划保持一致。表1给出了美国无人系统2017—2042年四大发展主题、关键支撑技术及目标。
表1 美国无人系统2017—2042年四大发展主题、关键支撑技术及目标

(1)提供总体战略指南,确保各层级发展无人系统的目标及工作与国防部规划保持一致
该路线图旨在作为国防部无人系统总体战略指南,从总体上确保各军种无人系统的发展与国防部保持规划一致,致力于减少重复工作、提高协同能力、确认风险,并对国防部和工业界协作发展的无人系统主要领域进行描述。此外,该路线图将综合考虑无人系统面临风险,统筹安排军方对无人系统创新项目投资,并作为无人系统战略纲要。该路线图用于国防部层面的同时,也指导需求开发人员、预算规划人员、项目经理、科研人员、作战人员等开展工作。
(2)通过技术趋势研究形成四个主题,以构建敏捷、灵活的技术和政策基础,从而孵化颠覆性技术和运作方式
国防部通过组织专门的团队,对来自国防部各级参考文件进行审查分析,并对工业界和学术界的技术趋势进行研究,总结提炼出四个共同主题和关键要素。这四大主题为无人系统集成和使用技术评估以及作战条令、组织、训练、政策改进等提供基础。从而构建敏捷灵活的技术和政策基础,以此发展颠覆性技术和运用方式,并与国防部的工作相融合,以使国防部更加协同和有序地利用无人系统技术提升军力。
关键技术动向
美军2018年无人系统的发展关键动向印证了美国大力推进 2042 年路线图四个主题的发展;同时,四个主题的发展引领无人系统未来的发展方向。
(1)加快通用 / 开放体系架构、部件模块化及试验鉴定验证等进程,提升无人系统的互用性及体系作战的融入
未来体系作战将越来越多的使用无人系统,互用性将构成充分利用无人系统技术的一体化联合和联盟部队的基础。在有人和无人系统动态混编的部队中,无人系统必须能跨越系统和领域与其他无人系统及人员进行通信、信息共享和交互协作。未来的作战环境,部队和系统之间必须多个指挥层级,不同作战单元之间通信、信息共享和任务分配,并在战场上实时进行任务分派。
通用架构将在任务空间或工作领域使用一系列共同标准,以确保系统间和跨领域的协同。国防部通过支持系列计划为空中和地面无人系统定义通用语言/信息传递架构及通用安全通信架构。这些架构指导各军种和工业界的未来开发工作。具体包括小型无人系统自主架构、无人系统联合架构(JAUS)、无人机系统控制段架构(UCS)、无人系统联合通信架构(JCAUS)、无人机系统地面控制站人机接口开发和标准化指南、开放商业模式等。为未来分布式作战和集群作战发展,美国国防预先研究计划局(DARPA)通过实施“ 体系集成技术与试验(SoSITE)”项目发展开发时体系架构技术,目标把单一装备的空战能力分布在大量可互操作的有人和无人平台上,实现各种先进机载系统和机载武器的即插即用,极大提升蜂群的灵活性(如图1)。2018年6月完成多域组网的飞行验证。此外,通过“ 拒止环境协同作战”(CODE)项目,发展蜂群协同开放式架构,2018年1月完成开放式架构指标飞行验证。
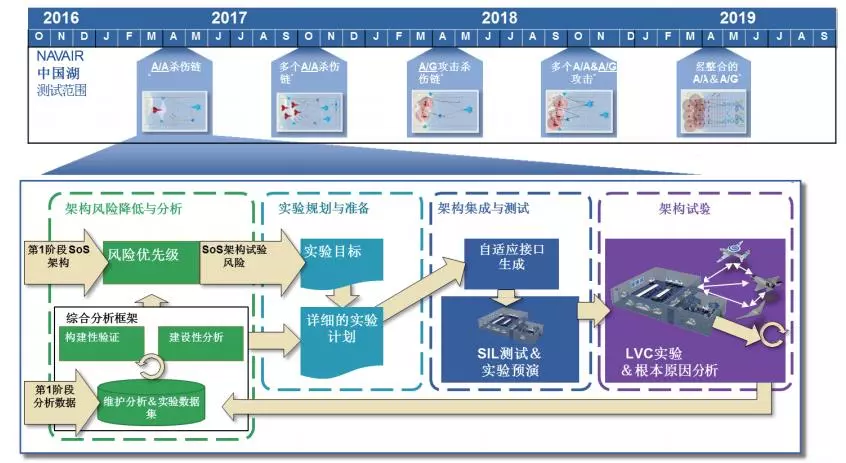
图1 “体系集成技术与试验(SoSITE)”项目进度及开放架构内容
模块化便于适应新任务及实现相应的软硬件更换,从而节约时间与成本。典型项目为美国空军模块化“ 敏捷吊舱”(如图2)。敏捷吊舱具有多种型号,可执行各种任务,能快速更换有效负载以适应多个平台。同时,该吊舱采用开放式、标准化结构设计,既可以承担情报、监视与侦察(ISR)任务,也可以用于其他领域,能够最大限度地满足使用灵活性。敏捷吊舱是一个类似乐高的系统,可以包含三到五个独立的部分,每个部分都可以容纳不同的传感器系统。2018年3月进行了三次MQ-9死神无人机挂载飞行试验。

图2 敏捷吊舱(左)由3到5个识别载荷舱组成(右)
自主系统的试验、鉴定、验证和确认是保障高度自主的关键,重点在于精确且结构化的标准和工具。DARPA支撑下发展的“ 自主性鉴定自查评估工具”(AVIA)项目,重点发展测试自主系统的自主逻辑性工具。DARPA实施的“ 进攻性集群使能战术”项目,发展无人自主集群集成试验床是其关键技术之一。
(2)基于人工智能发展不断增强自主作战能力,提高无人系统作战效率和效能
基于人工智能和机器学习可开发具有高度自主水平的无人系统,这种学习能力能扩展和改进无人系统的功能,变革战场管理和指挥控制,提高无人系统效率和效能,增强战场作战能力。在无人系统利用人工智能的过程中,需解决信任问题,同时调整相关政策与法律限制。国防部加强与私营企业合作获得成熟解决方案,并对自主无人系统终端控制进行演示验证,深度利用人工智能技术,使无人系统具有类人智慧;同时提高作战安全性和效率,提升人机编组能力,实现从任务支持到作战支持,发展接近全自主的无人系统。
DARPA实施的“ 快速自主轻量(FLA)”旨在开发一种先进的算法,使无人机或无人车辆能够在没有人类操作员、GPS或任何数据链的引导下自主运行,侧重于自主性,其中“ 自主”包括感知、规划、控制等方面。2018年7月完成第二阶段飞行试验,验证了算法的无人自主性的两个方案,完成多层建筑之间以及狭窄空间的飞行并识别目标,验证穿过狭窄窗户进入建筑物,沿着走廊找房间并创建内部的三维地图,同时验证了可识别并飞下一段楼梯,然后通过敞开的门口离开大楼,如图3。2018 年10月,美国波士顿动力公司研制的机器人Atlas,基于人工智能算法,完成跨越障碍和三级跳,在动作的连贯性上已经逼近人类的表现。2018年10月,通用动力公司公布了最新的金枪鱼-9无人潜航器,其集高导航精度、高声呐分辨率和精密作业能力于一体,可在数分钟内形成精确数据(此前一般需数小时),可用于国防、商业以及研究等领域。2018年6月,美海军刀鱼水下猎雷无人潜航器通过海上验收试验,测试证明刀鱼系统基于先进的算法可在高杂波环境中检测、分类并识别水雷。DARPA实施的“终身学习机器”(L2M)项目,旨在开发全新的机器学习方法,使无人系统能够不断适应新环境而不会忘记以前的学习内容。2018年5月取得两项突破,第一个技术领域致力于开发完整的系统及其组件,第二个技术领域将探索生物有机体的学习机制,目标是将其转化为计算过程。

图3 “快速自主轻量(FLA)”项目第二阶段飞行测试
(3)加强赛博防御、信息保障和电子战防护建设,确保无人系统作战的网络安全
无人系统在通信/GPS拒止环境中易受赛博、电子战攻击。在无人系统发展中,需要不断加强集成赛博防御、电子战防护技术,以确保信息的完整性、实用性和安全性。
2018 年 7 月,美国CTSi公司和L3 技术公司在美国海军支撑下完成用于高度竞争和GPS拒止环境的一体化通信导航系统的飞行测试。该系统为“ 增强型链路导航系统(ELNS)”,是首个能在GPS 拒止环境中向小型无人机系统(UAS)提供导航能力的系统,引领了飞行器定位、导航和授时(PNT)功能的发展新方向。可利用在通信和 GPS拒止环境中仍能发挥作用的波形,对抗敌军探测和中断盟军信号的行动。
(4)强化建设人机接口、人机编队技术,支撑人机协同的体系化作战的实现
人机接口是人类操作和收集来自无人系统信息的机制。未来,人机接口将实现更高级别的人机协助和战斗编队,以任务和编队为中心,将人类识别和判断能力与无人系统的自主技术相结合,利用多域资源来满足动态任务目标。
DARPA实施的“ 拒止环境中协同作战(CODE)”项目实现了对这方面的探索。2018 年1 月,CODE项目下开发的“ 协同和应急规划监控(SuperC3DE)”系统完成单人对无人机集群任务的人在回路监控试验。试验中,系统监控两架真实和两架虚拟RQ-23 虎鲨无人机集群在通信受限环境下执行ISR任务,验证了集群状态监测、自主人/机应急决策方案生成、紧急干预等功能。
人机编组是士兵、有人和无人系统同步部署、协同工作,结合各自优势,以产生不对称的作战优势的作战能力。未来发展的重点是士兵、有人和无人系统之间寻求最佳平衡点,以实现减小士兵作战负荷、增强各军种作战能力。
2018年1月,根据美国国防部长办公室支持的“ 自主性研究试点计划”(ARPI),美国陆军研究实验室(ARL)完成了两个项目,研究了通过增强代理透明度这一方法来改进人与人工智能代理之间的协作,成功验证了提升人与人工智能代理编队工作效率的新方法。该方法是指机器人、无人驾驶车辆或软件代理向人类传达其意图、行为、未来计划和推理过程的能力。
2018年7月,德事隆系统公司和德事隆航空防务公司成功完成有人-无人机编队协作能力的集成和验证飞行项目。在此次验证飞行中,通过德事隆系统公司代号为Synturian的控制和协作技术,德事隆航空防务公司蝎子攻击机成功发挥其优势,将能力提升到新的级别,德事隆系统的互操作水平(LOI)由3提升到4,同时使移动飞行器对多设备的指挥和控制成为了可能。
2018年7月,美海军陆战队成功测试了单人单次控制 6 架无人机,未来希望能达到单人单次控制15架。
2018年10月,DARPA征集“ 进攻性蜂群使能战术(OFFSET)”项目“ 蜂群冲刺”第三阶段提案,主要包含两个研究领域,一是士兵-蜂群编队的革新,二是蜂群战术库的扩充。士兵-蜂群编队的革新是指包括设计、开发并演示新的编队模式,以增强人与自主蜂群的交互方式。该研究领域识别并寻求解决蜂群系统本身的复杂性,以及士兵或战术指挥员在进行城市作战时的认知需求、生理需求与情境需求。蜂群战术库的扩充是指,通过OFFSET项目中的蜂群战术交互,研究新的蜂群战术,以扩充蜂群战术库。蜂群战术库是一个工具、战术和方法的存储库,供蜂群“ 冲刺者”使用。选定的蜂群“ 冲刺者”将设计并实施战术库中没有的复杂蜂群战术,具体内容为:采用由空中无人机和地面机器人组成的多样化蜂群,在1~2h内解决四个城市广场街区的“城市突袭”任务。
美国国防部2042年路线图是为确保美军未来利用无人系统获取绝对优势,既满足当前紧急作战需求,又立足未来体系作战的支撑能力。2042年路线图指出19项需要近远期发展的关键技术,包括机器人技术、开放式体系架构、自主和建模仿真、机器学习、人工智能、尺寸重量与功耗/小型化技术、集群能力、增强现实、虚拟现实、传感器技术、防撞技术、引领-跟随技术、GPS拒止解决方案、网络弹性和稳健性、信息安全解决方案、增加网络和频谱容量、人机接口、自主数据策略调整技术,是美军未来重点发展的关键技术。从主要动向看,美军已经开始实施项目,开始开展相关技术的研究,这些技术面向作战需求,对提升无人系统作战效率和效能将发挥重要作用。
原文请到美国国防部自行下载,无法上传附件。。。