TensorFlow入门(五)多层 LSTM 通俗易懂版
欢迎转载,但请务必注明原文出处及作者信息。
@author: huangyongye
@creat_date: 2017-03-09
前言: 根据我本人学习 TensorFlow 实现 LSTM 的经历,发现网上虽然也有不少教程,其中很多都是根据官方给出的例子,用多层 LSTM 来实现 PTBModel 语言模型,比如:
tensorflow笔记:多层LSTM代码分析
但是感觉这些例子还是太复杂了,所以这里写了个比较简单的版本,虽然不优雅,但是还是比较容易理解。
如果你想了解 LSTM 的原理的话(前提是你已经理解了普通 RNN 的原理),可以参考我前面翻译的博客:
(译)理解 LSTM 网络 (Understanding LSTM Networks by colah)
如果你想了解 RNN 原理的话,可以参考 AK 的博客:
The Unreasonable Effectiveness of Recurrent Neural Networks
很多朋友提到多层怎么理解,所以自己做了一个示意图,希望帮助初学者更好地理解 多层RNN.
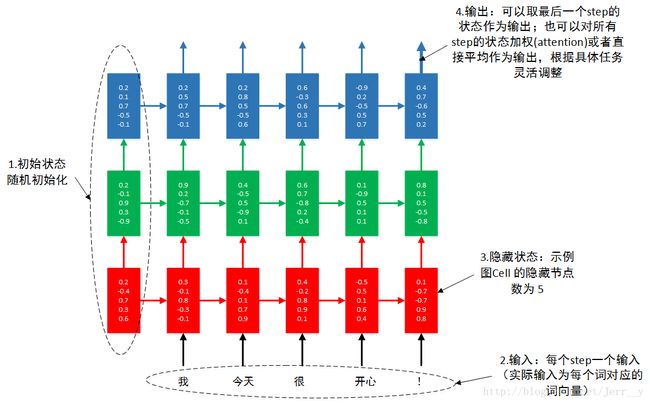
图1 3层RNN按时间步展开
本例不讲原理。通过本例,你可以了解到单层 LSTM 的实现,多层 LSTM 的实现。输入输出数据的格式。 RNN 的 dropout layer 的实现。
# -*- coding:utf-8 -*-
import tensorflow as tf
import numpy as np
from tensorflow.contrib import rnn
from tensorflow.examples.tutorials.mnist import input_data
# 设置 GPU 按需增长
config = tf.ConfigProto()
config.gpu_options.allow_growth = True
sess = tf.Session(config=config)
# 首先导入数据,看一下数据的形式
mnist = input_data.read_data_sets('MNIST_data', one_hot=True)
print mnist.train.images.shapeExtracting MNIST_data/train-images-idx3-ubyte.gz
Extracting MNIST_data/train-labels-idx1-ubyte.gz
Extracting MNIST_data/t10k-images-idx3-ubyte.gz
Extracting MNIST_data/t10k-labels-idx1-ubyte.gz
(55000, 784)
1. 首先设置好模型用到的各个超参数
lr = 1e-3
# 在训练和测试的时候,我们想用不同的 batch_size.所以采用占位符的方式
batch_size = tf.placeholder(tf.int32) # 注意类型必须为 tf.int32
# 在 1.0 版本以后请使用 :
# keep_prob = tf.placeholder(tf.float32, [])
# batch_size = tf.placeholder(tf.int32, [])
# 每个时刻的输入特征是28维的,就是每个时刻输入一行,一行有 28 个像素
input_size = 28
# 时序持续长度为28,即每做一次预测,需要先输入28行
timestep_size = 28
# 每个隐含层的节点数
hidden_size = 256
# LSTM layer 的层数
layer_num = 2
# 最后输出分类类别数量,如果是回归预测的话应该是 1
class_num = 10
_X = tf.placeholder(tf.float32, [None, 784])
y = tf.placeholder(tf.float32, [None, class_num])
keep_prob = tf.placeholder(tf.float32)2. 开始搭建 LSTM 模型,其实普通 RNNs 模型也一样
# 把784个点的字符信息还原成 28 * 28 的图片
# 下面几个步骤是实现 RNN / LSTM 的关键
####################################################################
# **步骤1:RNN 的输入shape = (batch_size, timestep_size, input_size)
X = tf.reshape(_X, [-1, 28, 28])
# **步骤2:定义一层 LSTM_cell,只需要说明 hidden_size, 它会自动匹配输入的 X 的维度
lstm_cell = rnn.BasicLSTMCell(num_units=hidden_size, forget_bias=1.0, state_is_tuple=True)
# **步骤3:添加 dropout layer, 一般只设置 output_keep_prob
lstm_cell = rnn.DropoutWrapper(cell=lstm_cell, input_keep_prob=1.0, output_keep_prob=keep_prob)
# **步骤4:调用 MultiRNNCell 来实现多层 LSTM
mlstm_cell = rnn.MultiRNNCell([lstm_cell] * layer_num, state_is_tuple=True)
# **步骤5:用全零来初始化state
init_state = mlstm_cell.zero_state(batch_size, dtype=tf.float32)
# **步骤6:方法一,调用 dynamic_rnn() 来让我们构建好的网络运行起来
# ** 当 time_major==False 时, outputs.shape = [batch_size, timestep_size, hidden_size]
# ** 所以,可以取 h_state = outputs[:, -1, :] 作为最后输出
# ** state.shape = [layer_num, 2, batch_size, hidden_size],
# ** 或者,可以取 h_state = state[-1][1] 作为最后输出
# ** 最后输出维度是 [batch_size, hidden_size]
# outputs, state = tf.nn.dynamic_rnn(mlstm_cell, inputs=X, initial_state=init_state, time_major=False)
# h_state = outputs[:, -1, :] # 或者 h_state = state[-1][1]
# *************** 为了更好的理解 LSTM 工作原理,我们把上面 步骤6 中的函数自己来实现 ***************
# 通过查看文档你会发现, RNNCell 都提供了一个 __call__()函数(见最后附),我们可以用它来展开实现LSTM按时间步迭代。
# **步骤6:方法二,按时间步展开计算
outputs = list()
state = init_state
with tf.variable_scope('RNN'):
for timestep in range(timestep_size):
if timestep > 0:
tf.get_variable_scope().reuse_variables()
# 这里的state保存了每一层 LSTM 的状态
(cell_output, state) = mlstm_cell(X[:, timestep, :], state)
outputs.append(cell_output)
h_state = outputs[-1]3. 设置 loss function 和 优化器,展开训练并完成测试
- 以下部分其实和之前写的 TensorFlow入门(三)多层 CNNs 实现 mnist分类 的对应部分是一样的。
# 上面 LSTM 部分的输出会是一个 [hidden_size] 的tensor,我们要分类的话,还需要接一个 softmax 层
# 首先定义 softmax 的连接权重矩阵和偏置
# out_W = tf.placeholder(tf.float32, [hidden_size, class_num], name='out_Weights')
# out_bias = tf.placeholder(tf.float32, [class_num], name='out_bias')
# 开始训练和测试
W = tf.Variable(tf.truncated_normal([hidden_size, class_num], stddev=0.1), dtype=tf.float32)
bias = tf.Variable(tf.constant(0.1,shape=[class_num]), dtype=tf.float32)
y_pre = tf.nn.softmax(tf.matmul(h_state, W) + bias)
# 损失和评估函数
cross_entropy = -tf.reduce_mean(y * tf.log(y_pre))
train_op = tf.train.AdamOptimizer(lr).minimize(cross_entropy)
correct_prediction = tf.equal(tf.argmax(y_pre,1), tf.argmax(y,1))
accuracy = tf.reduce_mean(tf.cast(correct_prediction, "float"))
sess.run(tf.global_variables_initializer())
for i in range(2000):
_batch_size = 128
batch = mnist.train.next_batch(_batch_size)
if (i+1)%200 == 0:
train_accuracy = sess.run(accuracy, feed_dict={
_X:batch[0], y: batch[1], keep_prob: 1.0, batch_size: _batch_size})
# 已经迭代完成的 epoch 数: mnist.train.epochs_completed
print "Iter%d, step %d, training accuracy %g" % ( mnist.train.epochs_completed, (i+1), train_accuracy)
sess.run(train_op, feed_dict={_X: batch[0], y: batch[1], keep_prob: 0.5, batch_size: _batch_size})
# 计算测试数据的准确率
print "test accuracy %g"% sess.run(accuracy, feed_dict={
_X: mnist.test.images, y: mnist.test.labels, keep_prob: 1.0, batch_size:mnist.test.images.shape[0]})
Iter0, step 200, training accuracy 0.851562
Iter0, step 400, training accuracy 0.960938
Iter1, step 600, training accuracy 0.984375
Iter1, step 800, training accuracy 0.960938
Iter2, step 1000, training accuracy 0.984375
Iter2, step 1200, training accuracy 0.9375
Iter3, step 1400, training accuracy 0.96875
Iter3, step 1600, training accuracy 0.984375
Iter4, step 1800, training accuracy 0.992188
Iter4, step 2000, training accuracy 0.984375
test accuracy 0.9858
我们一共只迭代不到5个epoch,在测试集上就已经达到了0.9825的准确率,可以看出来 LSTM 在做这个字符分类的任务上还是比较有效的,而且我们最后一次性对 10000 张测试图片进行预测,才占了 725 MiB 的显存。而我们在之前的两层 CNNs 网络中,预测 10000 张图片一共用了 8721 MiB 的显存,差了整整 12 倍呀!! 这主要是因为 RNN/LSTM 网络中,每个时间步所用的权值矩阵都是共享的,可以通过前面介绍的 LSTM 的网络结构分析一下,整个网络的参数非常少。
4. 可视化看看 LSTM 的是怎么做分类的
毕竟 LSTM 更多的是用来做时序相关的问题,要么是文本,要么是序列预测之类的,所以很难像 CNNs 一样非常直观地看到每一层中特征的变化。在这里,我想通过可视化的方式来帮助大家理解 LSTM 是怎么样一步一步地把图片正确的给分类。
import matplotlib.pyplot as plt看下面我找了一个字符 3
print mnist.train.labels[4][ 0. 0. 0. 1. 0. 0. 0. 0. 0. 0.]
我们先来看看这个字符样子,上半部分还挺像 2 来的
X3 = mnist.train.images[4]
img3 = X3.reshape([28, 28])
plt.imshow(img3, cmap='gray')
plt.show()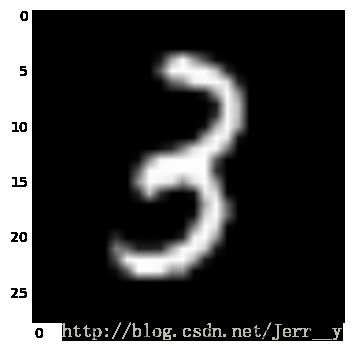
我们看看在分类的时候,一行一行地输入,分为各个类别的概率会是什么样子的。
X3.shape = [-1, 784]
y_batch = mnist.train.labels[0]
y_batch.shape = [-1, class_num]
X3_outputs = np.array(sess.run(outputs, feed_dict={
_X: X3, y: y_batch, keep_prob: 1.0, batch_size: 1}))
print X3_outputs.shape
X3_outputs.shape = [28, hidden_size]
print X3_outputs.shape(28, 1, 256)
(28, 256)
h_W = sess.run(W, feed_dict={
_X:X3, y: y_batch, keep_prob: 1.0, batch_size: 1})
h_bias = sess.run(bias, feed_dict={
_X:X3, y: y_batch, keep_prob: 1.0, batch_size: 1})
h_bias.shape = [-1, 10]
bar_index = range(class_num)
for i in xrange(X3_outputs.shape[0]):
plt.subplot(7, 4, i+1)
X3_h_shate = X3_outputs[i, :].reshape([-1, hidden_size])
pro = sess.run(tf.nn.softmax(tf.matmul(X3_h_shate, h_W) + h_bias))
plt.bar(bar_index, pro[0], width=0.2 , align='center')
plt.axis('off')
plt.show()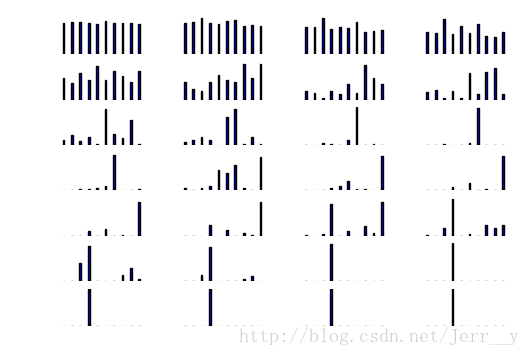
在上面的图中,为了更清楚地看到线条的变化,我把坐标都去了,每一行显示了 4 个图,共有 7 行,表示了一行一行读取过程中,模型对字符的识别。可以看到,在只看到前面的几行像素时,模型根本认不出来是什么字符,随着看到的像素越来越多,最后就基本确定了它是字符 3.
好了,本次就到这里。有机会再写个优雅一点的例子,哈哈。其实学这个 LSTM 还是比较困难的,当时写 多层 CNNs 也就半天到一天的时间基本上就没啥问题了,但是这个花了我大概整整三四天,而且是在我对原理已经很了解(我自己觉得而已。。。)的情况下,所以学会了感觉还是有点小高兴的~
17-04-19补充几个资料:
- recurrent_network.py 一个简单的 tensorflow LSTM 例子。
- Tensorflow下构建LSTM模型进行序列化标注 介绍非常好的一个 NLP 开源项目。(例子中有些函数可能在新版的 tensorflow 中已经更新了,但并不影响理解)
5. 附:BASICLSTM.__call__()
'''code: https://github.com/tensorflow/tensorflow/blob/master/tensorflow/contrib/rnn/python/ops/core_rnn_cell_impl.py'''
def __call__(self, inputs, state, scope=None):
"""Long short-term memory cell (LSTM)."""
with vs.variable_scope(scope or "basic_lstm_cell"):
# Parameters of gates are concatenated into one multiply for efficiency.
if self._state_is_tuple:
c, h = state
else:
c, h = array_ops.split(value=state, num_or_size_splits=2, axis=1)
concat = _linear([inputs, h], 4 * self._num_units, True, scope=scope)
# ** 下面四个 tensor,分别是四个 gate 对应的权重矩阵
# i = input_gate, j = new_input, f = forget_gate, o = output_gate
i, j, f, o = array_ops.split(value=concat, num_or_size_splits=4, axis=1)
# ** 更新 cell 的状态:
# ** c * sigmoid(f + self._forget_bias) 是保留上一个 timestep 的部分旧信息
# ** sigmoid(i) * self._activation(j) 是有当前 timestep 带来的新信息
new_c = (c * sigmoid(f + self._forget_bias) + sigmoid(i) *
self._activation(j))
# ** 新的输出
new_h = self._activation(new_c) * sigmoid(o)
if self._state_is_tuple:
new_state = LSTMStateTuple(new_c, new_h)
else:
new_state = array_ops.concat([new_c, new_h], 1)
# ** 在(一般都是) state_is_tuple=True 情况下, new_h=new_state[1]
# ** 在上面博文中,就有 cell_output = state[1]
return new_h, new_state本文代码:https://github.com/yongyehuang/Tensorflow-Tutorial