线性分类器之Fisher线性判别
在前文《贝叶斯决策理论》中已经提到,很多情况下,准确地估计概率密度模型并非易事,在特征空间维数较高和样本数量较少的情况下尤为如此。
实际上,模式识别的目的是在特征空间中设法找到两类(或多类)的分类面,估计概率密度函数并不是我们的目的。
前文已经提到,正态分布情况下,贝叶斯决策的最优分类面是线性的或者是二次函数形式的,本文则着重讨论线性情况下的一类判别准则——Fisher判别准则。
为了避免陷入复杂的概率的计算,我们直接估计判别函数式中的参数(因为我们已经知道判别函数式是线性的)。
首先我们来回顾一下线性判别函数的基本概念:
表达形式:
其中, x 是 d 维特征向量; ω 称为权向量,决定分类面的方向; ω0 是个常数,称为阈权值。
关于 ω 和 ω0 的作用,大家可以考虑一下二维空间,则其分别对应于斜率和截距,事实上,高维空间亦是如此。
对于两类问题的决策规则:
令 g(x)=g1(x)−g2(x) (分别为第一类和第二类的判别函数,具体定义见前文),则
可以看出,方程 g(x)=0 定义了一个决策面,它把归类于 ω1 类的点和归类于 ω2 的点分割开来,从而完成分类的目的。
Fisher线性判别:
Fisher决策的出发点是:把所有的样本都投影到一维空间,使得在投影线上最易于分类 。
那什么是最易于分类的投影面呢?我们希望这个投影面是这样的:
投影后两类相隔尽可能远,而对同一类的样本又尽可能聚集。
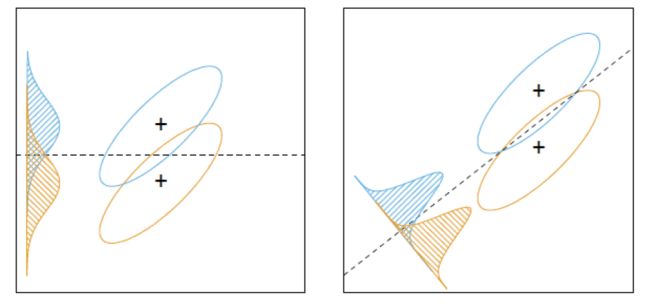
基于这个出发点,我们需要算出最佳的投影方向。如下图,右侧的投影面则优于左侧的投影面,因为它将两个类别更好地分开。
为了求出这个最佳投影面,我们要引入离散度矩阵的概念:
首先一些基本定义:
样本集: X={x1,x2,...,xN} , ω1 类: X1={x11,x12,...,x1N} , ω2 类: X2={x21,x22,...,x2N} ,投影函数: yi=ωTxi,i=1,2,...,N
离散度矩阵:
在 X 空间:
- 类均值向量:
- 类内离散度矩阵:
- 总类内离散度矩阵:
- 类间离散度矩阵:
在 Y 空间:
- 类均值:
- 类内离散度矩阵:
- 总类内离散度矩阵:
- 类间离散度矩阵:
Fisher准则函数:
实际上,Fisher准则函数就是使得类间离散度尽可能大,而类内离散度尽可能小,这样就能够使得两类之间尽可能分开,各类的内部又能尽可能聚集。
Fisher准则函数的求解:
带入 y=ωTx ,得
令分母 ωTSwω=c≠0 ,为常数,最大化分子,利用拉格朗日乘数法定理,有:
确定了 ω 我们也就确定了决策面的方向,下一步计算阈权值 ω0 :
(1)通常来讲,阈权值可以根据经验来选择:
(2) d 和 N 很大时, y 近似正态分布,可在 Y 空间内用贝叶斯分类器确定 ω0 。