深度学习AI美颜系列----基于抠图的人像特效算法
美颜算法的重点在于美颜,也就是增加颜值,颜值的广定义,可以延伸到整个人体范围,也就是说,你的颜值不单单和你的脸有关系,还跟你穿什么衣服,什么鞋子相关,基于这个定义(这个定义是本人自己的说法,没有权威性考究),今天我们基于人体抠图来做一些人像特效算法。
抠图技术很早之前就有很多论文研究,但是深度学习的出现,大大的提高了抠图的精度,从CNN到FCN/FCN+/UNet等等,论文层出不穷,比如这篇Automatic Portrait Segmentation for Image Stylization,在FCN的基础上,提出了FCN+,专门针对人像抠图,效果如下:

图a是人像原图,图b是分割的Mask,图cde是基于Mask所做的一些效果滤镜;
要了解这篇论文,首先我们需要了解FCN,用FCN做图像分割:
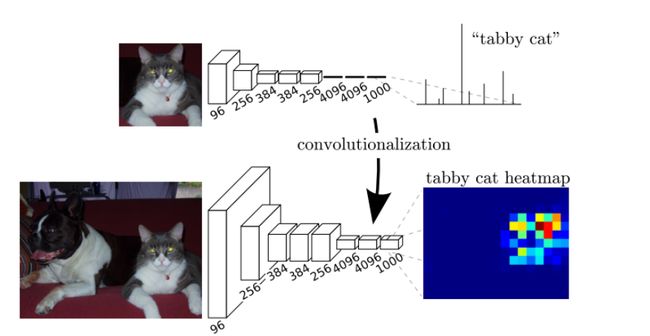
该图中上面部分是CNN做图像分割的网络模型,可以看到,最后是全连接层来处理的,前5层是卷积层,第6层和第7层分别是一个长度为4096的一维向量,第8层是长度为1000的一维向量,分别对应1000个类别的概率;而下图部分是FCN,它将最后的三个全连接层换成了卷积层,卷积核的大小(通道数,宽,高)分别为(4096,1,1)、(4096,1,1)、(1000,1,1),这样以来,所有层都是卷积层,因此称为全卷积网络;
FCN网络流程如下:
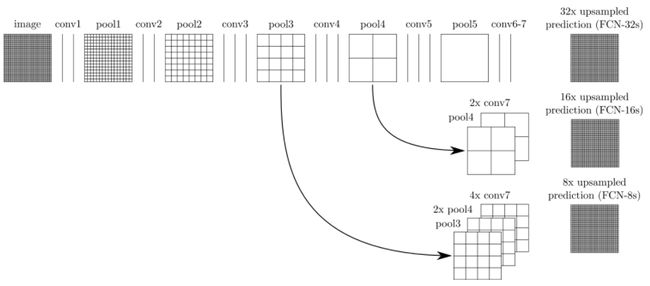
在这个网络中,经过5次卷积(和pooling)以后,图像的分辨率依次缩小了2,4,8,16,32倍,对于第5层的输出,是缩小32倍的小图,我们需要将其进行上采样反卷积来得到原图大小的分辨率,也就是32倍放大,这样得到的结果就是FCN-32s,由于放大32倍,所以很不精确,因此,我们对第4层和第3层依次进行了反卷积放大,以求得到更加精细的分割结果,这个就是FCN的图像分割算法流程。
与传统CNN相比FCN的的优缺点如下:
优点:
①可以接受任意大小的输入图像,而不用要求所有的训练图像和测试图像具有同样的尺寸;
②更加高效,避免了由于使用像素块而带来的重复存储和计算卷积的问题;
缺点:
①得到的结果还是不够精细。进行8倍上采样虽然比32倍的效果好了很多,但是上采样的结果还是比较模糊和平滑,对图像中的细节不敏感;
②没有充分考虑像素与像素之间的关系,也就是丢失了空间信息的考虑;
在了解了FCN之后,就容易理解FCN+了,Automatic Portrait Segmentation for Image Stylization这篇论文就是针对FCN的缺点,进行了改进,在输入的数据中添加了人脸的空间位置信息,形状信息,以求得到精确的分割结果,如下图所示:
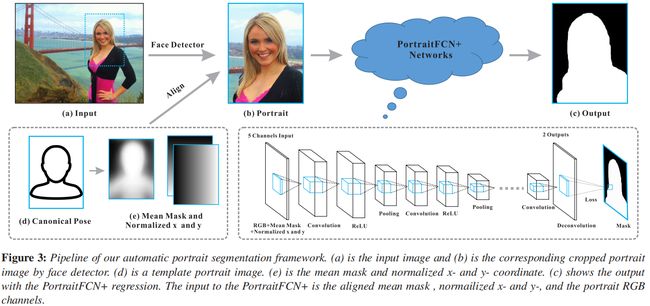
对于位置和形状数据的生成:
位置通道:标识像素与人脸的相对位置,由于每张图片位置都不一样,我们采用归一化的x和y通道(像素的坐标),坐标以第一次检测到人脸特征点为准,并预估了匹配到的特征与人体标准姿势之间的一个单应变换T,我们将归一化的x通道定义为T(ximg),其中ximg是以人脸中心位置为0点的x坐标,同理y也是如此。这样,我们就得到了每个像素相对于人脸的位置(尺寸也有相应于人脸大小的缩放),形成了x和y通道。
形状通道:参考人像的标准形状(脸和部分上身),我们定义了一个形状通道。首先用我们的数据集计算一个对齐的平均人像mask。计算方法为:对每一对人像+mask,用上一步得到的单应变换T对mask做变换,变换到人体标准姿势,然后求均值。
W取值为0或1,当变换后在人像内的取值为1,否则为0。
然后就可以对平均mask类似地变换以与输入人像的面部特征点对齐。
论文对应的代码链接:点击打开链接
主体FCN+代码:
from __future__ import print_function
import tensorflow as tf
import numpy as np
import TensorflowUtils_plus as utils
#import read_MITSceneParsingData as scene_parsing
import datetime
#import BatchDatsetReader as dataset
from portrait_plus import BatchDatset, TestDataset
from PIL import Image
from six.moves import xrange
from scipy import misc
FLAGS = tf.flags.FLAGS
tf.flags.DEFINE_integer("batch_size", "5", "batch size for training")
tf.flags.DEFINE_string("logs_dir", "logs/", "path to logs directory")
tf.flags.DEFINE_string("data_dir", "Data_zoo/MIT_SceneParsing/", "path to dataset")
tf.flags.DEFINE_float("learning_rate", "1e-4", "Learning rate for Adam Optimizer")
tf.flags.DEFINE_string("model_dir", "Model_zoo/", "Path to vgg model mat")
tf.flags.DEFINE_bool('debug', "False", "Debug mode: True/ False")
tf.flags.DEFINE_string('mode', "train", "Mode train/ test/ visualize")
MODEL_URL = 'http://www.vlfeat.org/matconvnet/models/beta16/imagenet-vgg-verydeep-19.mat'
MAX_ITERATION = int(1e5 + 1)
NUM_OF_CLASSESS = 2
IMAGE_WIDTH = 600
IMAGE_HEIGHT = 800
def vgg_net(weights, image):
layers = (
'conv1_1', 'relu1_1', 'conv1_2', 'relu1_2', 'pool1',
'conv2_1', 'relu2_1', 'conv2_2', 'relu2_2', 'pool2',
'conv3_1', 'relu3_1', 'conv3_2', 'relu3_2', 'conv3_3',
'relu3_3', 'conv3_4', 'relu3_4', 'pool3',
'conv4_1', 'relu4_1', 'conv4_2', 'relu4_2', 'conv4_3',
'relu4_3', 'conv4_4', 'relu4_4', 'pool4',
'conv5_1', 'relu5_1', 'conv5_2', 'relu5_2', 'conv5_3',
'relu5_3', 'conv5_4', 'relu5_4'
)
net = {}
current = image
for i, name in enumerate(layers):
if name in ['conv3_4', 'relu3_4', 'conv4_4', 'relu4_4', 'conv5_4', 'relu5_4']:
continue
kind = name[:4]
if kind == 'conv':
kernels, bias = weights[i][0][0][0][0]
# matconvnet: weights are [width, height, in_channels, out_channels]
# tensorflow: weights are [height, width, in_channels, out_channels]
kernels = utils.get_variable(np.transpose(kernels, (1, 0, 2, 3)), name=name + "_w")
bias = utils.get_variable(bias.reshape(-1), name=name + "_b")
current = utils.conv2d_basic(current, kernels, bias)
elif kind == 'relu':
current = tf.nn.relu(current, name=name)
if FLAGS.debug:
utils.add_activation_summary(current)
elif kind == 'pool':
current = utils.avg_pool_2x2(current)
net[name] = current
return net
def inference(image, keep_prob):
"""
Semantic segmentation network definition
:param image: input image. Should have values in range 0-255
:param keep_prob:
:return:
"""
print("setting up vgg initialized conv layers ...")
model_data = utils.get_model_data(FLAGS.model_dir, MODEL_URL)
mean = model_data['normalization'][0][0][0]
mean_pixel = np.mean(mean, axis=(0, 1))
weights = np.squeeze(model_data['layers'])
#processed_image = utils.process_image(image, mean_pixel)
with tf.variable_scope("inference"):
image_net = vgg_net(weights, image)
conv_final_layer = image_net["conv5_3"]
pool5 = utils.max_pool_2x2(conv_final_layer)
W6 = utils.weight_variable([7, 7, 512, 4096], name="W6")
b6 = utils.bias_variable([4096], name="b6")
conv6 = utils.conv2d_basic(pool5, W6, b6)
relu6 = tf.nn.relu(conv6, name="relu6")
if FLAGS.debug:
utils.add_activation_summary(relu6)
relu_dropout6 = tf.nn.dropout(relu6, keep_prob=keep_prob)
W7 = utils.weight_variable([1, 1, 4096, 4096], name="W7")
b7 = utils.bias_variable([4096], name="b7")
conv7 = utils.conv2d_basic(relu_dropout6, W7, b7)
relu7 = tf.nn.relu(conv7, name="relu7")
if FLAGS.debug:
utils.add_activation_summary(relu7)
relu_dropout7 = tf.nn.dropout(relu7, keep_prob=keep_prob)
W8 = utils.weight_variable([1, 1, 4096, NUM_OF_CLASSESS], name="W8")
b8 = utils.bias_variable([NUM_OF_CLASSESS], name="b8")
conv8 = utils.conv2d_basic(relu_dropout7, W8, b8)
# annotation_pred1 = tf.argmax(conv8, dimension=3, name="prediction1")
# now to upscale to actual image size
deconv_shape1 = image_net["pool4"].get_shape()
W_t1 = utils.weight_variable([4, 4, deconv_shape1[3].value, NUM_OF_CLASSESS], name="W_t1")
b_t1 = utils.bias_variable([deconv_shape1[3].value], name="b_t1")
conv_t1 = utils.conv2d_transpose_strided(conv8, W_t1, b_t1, output_shape=tf.shape(image_net["pool4"]))
fuse_1 = tf.add(conv_t1, image_net["pool4"], name="fuse_1")
deconv_shape2 = image_net["pool3"].get_shape()
W_t2 = utils.weight_variable([4, 4, deconv_shape2[3].value, deconv_shape1[3].value], name="W_t2")
b_t2 = utils.bias_variable([deconv_shape2[3].value], name="b_t2")
conv_t2 = utils.conv2d_transpose_strided(fuse_1, W_t2, b_t2, output_shape=tf.shape(image_net["pool3"]))
fuse_2 = tf.add(conv_t2, image_net["pool3"], name="fuse_2")
shape = tf.shape(image)
deconv_shape3 = tf.stack([shape[0], shape[1], shape[2], NUM_OF_CLASSESS])
W_t3 = utils.weight_variable([16, 16, NUM_OF_CLASSESS, deconv_shape2[3].value], name="W_t3")
b_t3 = utils.bias_variable([NUM_OF_CLASSESS], name="b_t3")
conv_t3 = utils.conv2d_transpose_strided(fuse_2, W_t3, b_t3, output_shape=deconv_shape3, stride=8)
annotation_pred = tf.argmax(conv_t3, dimension=3, name="prediction")
return tf.expand_dims(annotation_pred, dim=3), conv_t3
def train(loss_val, var_list):
optimizer = tf.train.AdamOptimizer(FLAGS.learning_rate)
grads = optimizer.compute_gradients(loss_val, var_list=var_list)
if FLAGS.debug:
# print(len(var_list))
for grad, var in grads:
utils.add_gradient_summary(grad, var)
return optimizer.apply_gradients(grads)
def main(argv=None):
keep_probability = tf.placeholder(tf.float32, name="keep_probabilty")
image = tf.placeholder(tf.float32, shape=[None, IMAGE_HEIGHT, IMAGE_WIDTH, 6], name="input_image")
annotation = tf.placeholder(tf.int32, shape=[None, IMAGE_HEIGHT, IMAGE_WIDTH, 1], name="annotation")
pred_annotation, logits = inference(image, keep_probability)
#tf.image_summary("input_image", image, max_images=2)
#tf.image_summary("ground_truth", tf.cast(annotation, tf.uint8), max_images=2)
#tf.image_summary("pred_annotation", tf.cast(pred_annotation, tf.uint8), max_images=2)
loss = tf.reduce_mean((tf.nn.sparse_softmax_cross_entropy_with_logits(logits,
tf.squeeze(annotation, squeeze_dims=[3]),
name="entropy")))
#tf.scalar_summary("entropy", loss)
trainable_var = tf.trainable_variables()
train_op = train(loss, trainable_var)
#print("Setting up summary op...")
#summary_op = tf.merge_all_summaries()
'''
print("Setting up image reader...")
train_records, valid_records = scene_parsing.read_dataset(FLAGS.data_dir)
print(len(train_records))
print(len(valid_records))
print("Setting up dataset reader")
image_options = {'resize': True, 'resize_size': IMAGE_SIZE}
if FLAGS.mode == 'train':
train_dataset_reader = dataset.BatchDatset(train_records, image_options)
validation_dataset_reader = dataset.BatchDatset(valid_records, image_options)
'''
train_dataset_reader = BatchDatset('data/trainlist.mat')
sess = tf.Session()
print("Setting up Saver...")
saver = tf.train.Saver()
#summary_writer = tf.train.SummaryWriter(FLAGS.logs_dir, sess.graph)
sess.run(tf.initialize_all_variables())
ckpt = tf.train.get_checkpoint_state(FLAGS.logs_dir)
if ckpt and ckpt.model_checkpoint_path:
saver.restore(sess, ckpt.model_checkpoint_path)
print("Model restored...")
#if FLAGS.mode == "train":
itr = 0
train_images, train_annotations = train_dataset_reader.next_batch()
trloss = 0.0
while len(train_annotations) > 0:
#train_images, train_annotations = train_dataset_reader.next_batch(FLAGS.batch_size)
#print('==> batch data: ', train_images[0][100][100], '===', train_annotations[0][100][100])
feed_dict = {image: train_images, annotation: train_annotations, keep_probability: 0.5}
_, rloss = sess.run([train_op, loss], feed_dict=feed_dict)
trloss += rloss
if itr % 100 == 0:
#train_loss, rpred = sess.run([loss, pred_annotation], feed_dict=feed_dict)
print("Step: %d, Train_loss:%f" % (itr, trloss / 100))
trloss = 0.0
#summary_writer.add_summary(summary_str, itr)
#if itr % 10000 == 0 and itr > 0:
'''
valid_images, valid_annotations = validation_dataset_reader.next_batch(FLAGS.batch_size)
valid_loss = sess.run(loss, feed_dict={image: valid_images, annotation: valid_annotations,
keep_probability: 1.0})
print("%s ---> Validation_loss: %g" % (datetime.datetime.now(), valid_loss))'''
itr += 1
train_images, train_annotations = train_dataset_reader.next_batch()
saver.save(sess, FLAGS.logs_dir + "plus_model.ckpt", itr)
'''elif FLAGS.mode == "visualize":
valid_images, valid_annotations = validation_dataset_reader.get_random_batch(FLAGS.batch_size)
pred = sess.run(pred_annotation, feed_dict={image: valid_images, annotation: valid_annotations,
keep_probability: 1.0})
valid_annotations = np.squeeze(valid_annotations, axis=3)
pred = np.squeeze(pred, axis=3)
for itr in range(FLAGS.batch_size):
utils.save_image(valid_images[itr].astype(np.uint8), FLAGS.logs_dir, name="inp_" + str(5+itr))
utils.save_image(valid_annotations[itr].astype(np.uint8), FLAGS.logs_dir, name="gt_" + str(5+itr))
utils.save_image(pred[itr].astype(np.uint8), FLAGS.logs_dir, name="pred_" + str(5+itr))
print("Saved image: %d" % itr)'''
def pred():
keep_probability = tf.placeholder(tf.float32, name="keep_probabilty")
image = tf.placeholder(tf.float32, shape=[None, IMAGE_HEIGHT, IMAGE_WIDTH, 6], name="input_image")
annotation = tf.placeholder(tf.int32, shape=[None, IMAGE_HEIGHT, IMAGE_WIDTH, 1], name="annotation")
pred_annotation, logits = inference(image, keep_probability)
sft = tf.nn.softmax(logits)
test_dataset_reader = TestDataset('data/testlist.mat')
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
ckpt = tf.train.get_checkpoint_state(FLAGS.logs_dir)
saver = tf.train.Saver()
if ckpt and ckpt.model_checkpoint_path:
saver.restore(sess, ckpt.model_checkpoint_path)
print("Model restored...")
itr = 0
test_images, test_annotations, test_orgs = test_dataset_reader.next_batch()
#print('getting', test_annotations[0, 200:210, 200:210])
while len(test_annotations) > 0:
if itr < 22:
test_images, test_annotations, test_orgs = test_dataset_reader.next_batch()
itr += 1
continue
elif itr > 22:
break
feed_dict = {image: test_images, annotation: test_annotations, keep_probability: 0.5}
rsft, pred_ann = sess.run([sft, pred_annotation], feed_dict=feed_dict)
print(rsft.shape)
_, h, w, _ = rsft.shape
preds = np.zeros((h, w, 1), dtype=np.float)
for i in range(h):
for j in range(w):
if rsft[0][i][j][0] < 0.1:
preds[i][j][0] = 1.0
elif rsft[0][i][j][0] < 0.9:
preds[i][j][0] = 0.5
else:
preds[i][j] = 0.0
org0_im = Image.fromarray(np.uint8(test_orgs[0]))
org0_im.save('res/org' + str(itr) + '.jpg')
save_alpha_img(test_orgs[0], test_annotations[0], 'res/ann' + str(itr))
save_alpha_img(test_orgs[0], preds, 'res/trimap' + str(itr))
save_alpha_img(test_orgs[0], pred_ann[0], 'res/pre' + str(itr))
test_images, test_annotations, test_orgs = test_dataset_reader.next_batch()
itr += 1
def save_alpha_img(org, mat, name):
w, h = mat.shape[0], mat.shape[1]
#print(mat[200:210, 200:210])
rmat = np.reshape(mat, (w, h))
amat = np.zeros((w, h, 4), dtype=np.int)
amat[:, :, 3] = np.round(rmat * 1000)
amat[:, :, 0:3] = org
#print(amat[200:205, 200:205])
#im = Image.fromarray(np.uint8(amat))
#im.save(name + '.png')
misc.imsave(name + '.png', amat)
if __name__ == "__main__":
#tf.app.run()
pred()
到这里FCN+做人像分割已经讲完,当然本文的目的不单单是分割,还有分割之后的应用;
我们将训练数据扩充到人体分割,那么我们就是对人体做美颜特效处理,同时对背景做其他的特效处理,这样整张画面就会变得更加有趣,更加提高颜值了,这里我们对人体前景做美颜调色处理,对背景做了以下特效:
①景深模糊效果,用来模拟双摄聚焦效果;
②马赛克效果
③缩放模糊效果
④运动模糊效果
⑤油画效果
⑥线条漫画效果
⑦Glow梦幻效果
⑧铅笔画场景效果
⑨扩散效果
效果举例如下:

原图

人体分割MASK
景深模糊效果

马赛克效果
扩散效果
缩放模糊效果
运动模糊效果

油画效果

线条漫画效果
GLOW梦幻效果

铅笔画效果
最后给出DEMO链接:点击打开链接
本人QQ1358009172