最近一直都比较忙,做了一些东西但是没有时间更新博客,这次写个小玩物,也可以说是一个实验,实现效果不错,很适合初学者自己动手做一个。
首先先上实物图
实验平台:EGO1开发板
FPGA型号:xc7a35tcsg324-1
代码平台:VIVADO
实现功能:按键数码管计数,0-99,麦克风控制舵机旋转,舵机旋转为顺时针180°后迅速转回,每次麦克风收到声音后,舵机会在转与不转中来回切换,流水灯在流与不流之间切换。
下面我们看RTL图
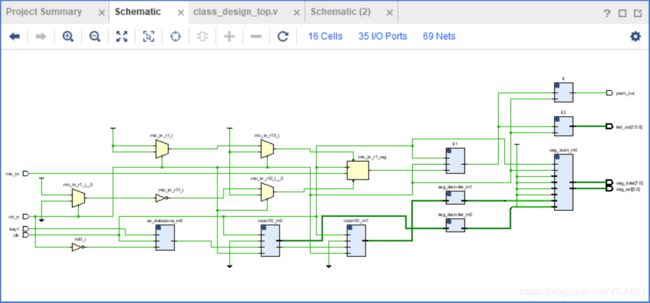
1.顶层文件
`timescale 1ns/1ps
module class_design_top(
input clk,
input mic_in,
input rst_n,
input key1,
output [5:0] seg_sel,
output [7:0] seg_data,
output pwm_out,
output [15:0] led_out
);
wire clk_en;
reg mic_in_r1 = 1'b1;
always @ (posedge clk or negedge rst_n)
begin
if(!rst_n)
mic_in_r1 = 1'b1;
else
mic_in_r1 <= mic_in;
end
pwm_out li(
.clk(clk_en),
.rst_n(rst_n),
.pwm_out(pwm_out)
);
mic_switch li1(
.clk(clk),
.rst_n(rst_n),
.sound_in(mic_in_r1),
.clk_en(clk_en)
);
flowing_light li2(
.clk(clk_en),
.rst(rst_n),
.led(led_out)
);
wire button_posedge;
ax_debounce ax_debounce_m0
(
.clk (clk),
.rst (~rst_n),
.button_in (key1),
.button_posedge (button_posedge),
.button_negedge (),
.button_out ()
);
wire[3:0] count;
wire t0;
count_m10 count10_m0(
.clk (clk),
.rst_n (rst_n),
.en (button_posedge),
.clr (1'b0),
.data (count),
.t (t0)
);
wire[3:0] count1;
wire t1;
count_m10 count10_m1(
.clk (clk),
.rst_n (rst_n),
.en (t0),
.clr (1'b0),
.data (count1),
.t (t1)
);
wire[6:0] seg_data_0;
seg_decoder seg_decoder_m0(
.bin_data (count),
.seg_data (seg_data_0)
);
wire[6:0] seg_data_1;
seg_decoder seg_decoder_m1(
.bin_data (count1),
.seg_data (seg_data_1)
);
seg_scan seg_scan_m0(
.clk (clk),
.rst_n (rst_n),
.seg_sel (seg_sel),
.seg_data (seg_data),
.seg_data_0 ({1'b1,7'b1111_111}),
.seg_data_1 ({1'b1,7'b1111_111}),
.seg_data_2 ({1'b1,7'b1111_111}),
.seg_data_3 ({1'b1,7'b1111_111}),
.seg_data_4 ({1'b1,seg_data_1}),
.seg_data_5 ({1'b1,seg_data_0})
);
endmodule
2.pwm产生文件,此代码为舵机的控制代码,对舵机控制有问题的同学请自行查询资料。
module pwm_out(
input clk,
input rst_n,
output pwm_out
);
reg [20:0] cnt = 21'd0;
reg [17:0] duty_cnt = 18'd100_000;
reg pwm_out_r1 = 1'b0;
reg flag = 1'b0;
assign pwm_out = pwm_out_r1;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
cnt <= 21'd0;
else if(cnt == 21'd1_000_000)
begin
cnt <= 21'd0;
pwm_out_r1 <= 1'b1;
end
else if(cnt == duty_cnt)
begin
pwm_out_r1 <= 1'b0;
cnt <= cnt + 21'd1;
end
else
cnt <= cnt + 21'd1;
end
always @ (posedge clk or negedge rst_n)
begin
if(!rst_n)
duty_cnt <= 18'd50_000;
else if(cnt == 21'd1_000_000)
begin
if (duty_cnt == 18'd100_000)
duty_cnt <= 18'd50_000;
else
duty_cnt <= duty_cnt + 18'd250;
end
end
3.麦克风开关函数,控制舵机的状态,该地方不能直接通过模块控制,因为麦克风模块收到声音后,并不是回输出一段高电平,而是很多20ms左右的杂乱的方波,对于高速率的FPGA来说,无法作为一个稳定的触发,所以本设计巧妙的将麦克风模块的信号接入80ms技术器的复位端,当声音输入,杂乱的方波会一直复位计数器,当最后一个下降沿后80ms,择可判断一次声音结束,这样的判断方法精度很高,实测效果很好。(差点就去给模块加滤波电路了)控制舵机和流水灯的方式为是否提供时钟
module pwm_out(
input clk,
input rst_n,
output pwm_out
);
reg [20:0] cnt = 21'd0;
reg [17:0] duty_cnt = 18'd100_000;
reg pwm_out_r1 = 1'b0;
reg flag = 1'b0;
assign pwm_out = pwm_out_r1;
always@(posedge clk or negedge rst_n)
begin
if(!rst_n)
cnt <= 21'd0;
else if(cnt == 21'd1_000_000)
begin
cnt <= 21'd0;
pwm_out_r1 <= 1'b1;
end
else if(cnt == duty_cnt)
begin
pwm_out_r1 <= 1'b0;
cnt <= cnt + 21'd1;
end
else
cnt <= cnt + 21'd1;
end
always @ (posedge clk or negedge rst_n)
begin
if(!rst_n)
duty_cnt <= 18'd50_000;
else if(cnt == 21'd1_000_000)
begin
if (duty_cnt == 18'd100_000)
duty_cnt <= 18'd50_000;
else
duty_cnt <= duty_cnt + 18'd250;
end
end
4.流水灯代码
`timescale 1ns / 1ps
module flowing_light(
input clk,
input rst,
output [15:0] led
);
reg [23 : 0] cnt_reg;
reg [15 : 0] light_reg;
always @ (posedge clk)
begin
if (!rst)
cnt_reg <= 0;
else
cnt_reg <= cnt_reg + 1;
end
always @ (posedge clk)
begin
if (!rst)
light_reg <= 16'h0001;
else if (cnt_reg == 24'hffffff)
begin
if (light_reg == 16'h8000)
light_reg <= 16'h0001;
else
light_reg <= light_reg << 1;
end
end
assign led = light_reg;
endmodule
5.经典的按键消抖和防止亚稳态的代码,来自黑金
`timescale 1 ns / 100 ps
module ax_debounce
(
input clk,
input rst,
input button_in,
output reg button_posedge,
output reg button_negedge,
output reg button_out
);
//// ---------------- internal constants --------------
parameter N = 32 ; // debounce timer bitwidth
parameter FREQ = 100; //model clock :Mhz
parameter MAX_TIME = 20; //ms
localparam TIMER_MAX_VAL = MAX_TIME * 1000 * FREQ;
////---------------- internal variables ---------------
reg [N-1 : 0] q_reg; // timing regs
reg [N-1 : 0] q_next;
reg DFF1, DFF2; // input flip-flops
wire q_add; // control flags
wire q_reset;
reg button_out_d0;
//// ------------------------------------------------------
////contenious assignment for counter control
assign q_reset = (DFF1 ^ DFF2); // xor input flip flops to look for level chage to reset counter
assign q_add = ~(q_reg == TIMER_MAX_VAL); // add to counter when q_reg msb is equal to 0
//// combo counter to manage q_next
always @ ( q_reset, q_add, q_reg)
begin
case( {q_reset , q_add})
2'b00 :
q_next <= q_reg;
2'b01 :
q_next <= q_reg + 1;
default :
q_next <= { N {1'b0} };
endcase
end
//// Flip flop inputs and q_reg update
always @ ( posedge clk or posedge rst)
begin
if(rst == 1'b1)
begin
DFF1 <= 1'b0;
DFF2 <= 1'b0;
q_reg <= { N {1'b0} };
end
else
begin
DFF1 <= button_in;
DFF2 <= DFF1;
q_reg <= q_next;
end
end
//// counter control
always @ ( posedge clk or posedge rst)
begin
if(rst == 1'b1)
button_out <= 1'b1;
else if(q_reg == TIMER_MAX_VAL)
button_out <= DFF2;
else
button_out <= button_out;
end
always @ ( posedge clk or posedge rst)
begin
if(rst == 1'b1)
begin
button_out_d0 <= 1'b1;
button_posedge <= 1'b0;
button_negedge <= 1'b0;
end
else
begin
button_out_d0 <= button_out;
button_posedge <= ~button_out_d0 & button_out;
button_negedge <= button_out_d0 & ~button_out;
end
end
endmodule
6.两个模10计数器代码,主要是对数码管计数控制
module count_m10(
input clk,
input rst_n,
input en, //Counter enable
input clr, //Counter synchronous reset
output reg[3:0]data, //counter value
output reg t // carry enable signal
);
always@(posedge clk or negedge rst_n)
begin
if(rst_n==0)
begin
data <= 4'd0;
t <= 1'd0;
end
else if(clr)
begin
data <= 4'd0;
t <= 1'd0;
end
else if(en)
begin
if(data==4'd9)
begin
t<= 1'b1; //Counter to 9 to generate carry
data <= 4'd0;//Counter to 9 reset
end
else
begin
t <= 1'b0;
data <= data + 4'd1;
end
end
else
t <= 1'b0;
end
endmodule
module count_m10(
input clk,
input rst_n,
input en, //Counter enable
input clr, //Counter synchronous reset
output reg[3:0]data, //counter value
output reg t // carry enable signal
);
always@(posedge clk or negedge rst_n)
begin
if(rst_n==0)
begin
data <= 4'd0;
t <= 1'd0;
end
else if(clr)
begin
data <= 4'd0;
t <= 1'd0;
end
else if(en)
begin
if(data==4'd9)
begin
t<= 1'b1; //Counter to 9 to generate carry
data <= 4'd0;//Counter to 9 reset
end
else
begin
t <= 1'b0;
data <= data + 4'd1;
end
end
else
t <= 1'b0;
end
endmodule
7.数码管编码器
module seg_decoder
(
input[3:0] bin_data, // bin data input
output reg[6:0] seg_data // seven segments LED output
);
always@(*)
begin
case(bin_data)
4'd0:seg_data <= ~(7'b100_0000);
4'd1:seg_data <= ~(7'b111_1001);
4'd2:seg_data <= ~(7'b010_0100);
4'd3:seg_data <= ~(7'b011_0000);
4'd4:seg_data <= ~(7'b001_1001);
4'd5:seg_data <= ~(7'b001_0010);
4'd6:seg_data <= ~(7'b000_0010);
4'd7:seg_data <= ~(7'b111_1000);
4'd8:seg_data <= ~(7'b000_0000);
4'd9:seg_data <= ~(7'b001_0000);
4'ha:seg_data <= ~(7'b000_1000);
4'hb:seg_data <= ~(7'b000_0011);
4'hc:seg_data <= ~(7'b100_0110);
4'hd:seg_data <= ~(7'b010_0001);
4'he:seg_data <= ~(7'b000_0110);
4'hf:seg_data <= ~(7'b000_1110);
default:seg_data <= ~(7'b111_1111);
endcase
end
endmodule
module seg_decoder
(
input[3:0] bin_data, // bin data input
output reg[6:0] seg_data // seven segments LED output
);
always@(*)
begin
case(bin_data)
4'd0:seg_data <= ~(7'b100_0000);
4'd1:seg_data <= ~(7'b111_1001);
4'd2:seg_data <= ~(7'b010_0100);
4'd3:seg_data <= ~(7'b011_0000);
4'd4:seg_data <= ~(7'b001_1001);
4'd5:seg_data <= ~(7'b001_0010);
4'd6:seg_data <= ~(7'b000_0010);
4'd7:seg_data <= ~(7'b111_1000);
4'd8:seg_data <= ~(7'b000_0000);
4'd9:seg_data <= ~(7'b001_0000);
4'ha:seg_data <= ~(7'b000_1000);
4'hb:seg_data <= ~(7'b000_0011);
4'hc:seg_data <= ~(7'b100_0110);
4'hd:seg_data <= ~(7'b010_0001);
4'he:seg_data <= ~(7'b000_0110);
4'hf:seg_data <= ~(7'b000_1110);
default:seg_data <= ~(7'b111_1111);
endcase
end
endmodule
8.数码管扫描代码
module seg_scan(
input clk,
input rst_n,
output reg[5:0] seg_sel, //digital led chip select
output reg[7:0] seg_data, //eight segment digital tube output,MSB is the decimal point
input[7:0] seg_data_0,
input[7:0] seg_data_1,
input[7:0] seg_data_2,
input[7:0] seg_data_3,
input[7:0] seg_data_4,
input[7:0] seg_data_5
);
parameter SCAN_FREQ = 400; //scan frequency
parameter CLK_FREQ = 100000000; //clock frequency
parameter SCAN_COUNT = CLK_FREQ /(SCAN_FREQ * 6) - 1;
reg[31:0] scan_timer; //scan time counter
reg[3:0] scan_sel; //Scan select counter
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
begin
scan_timer <= 32'd0;
scan_sel <= 4'd0;
end
else if(scan_timer >= SCAN_COUNT)
begin
scan_timer <= 32'd0;
if(scan_sel == 4'd5)
scan_sel <= 4'd0;
else
scan_sel <= scan_sel + 4'd1;
end
else
begin
scan_timer <= scan_timer + 32'd1;
end
end
always@(posedge clk or negedge rst_n)
begin
if(rst_n == 1'b0)
begin
seg_sel <= 6'b000000;
seg_data <= 8'h00;
end
else
begin
case(scan_sel)
//first digital led
4'd0:
begin
seg_sel <= 6'b00_0001;
seg_data <= seg_data_0;
end
//second digital led
4'd1:
begin
seg_sel <= 6'b00_0010;
seg_data <= seg_data_1;
end
//...
4'd2:
begin
seg_sel <= 6'b00_0100;
seg_data <= seg_data_2;
end
4'd3:
begin
seg_sel <= 6'b00_1000;
seg_data <= seg_data_3;
end
4'd4:
begin
seg_sel <= 6'b01_0000;
seg_data <= seg_data_4;
end
4'd5:
begin
seg_sel <= 6'b10_0000;
seg_data <= seg_data_5;
end
default:
begin
seg_sel <= 6'b00_0000;
seg_data <= 8'h00;
end
endcase
end
end
endmodule
以上为整个工程所有代码,代码简单容易理解,所有.v文件上面都有,自己记录一下,如果有需要的同学可在下方留言,我会看的^_^!