基于深度学习的ROS(机器人操作系统)的目标检测
一.环境搭建
硬件主机:i7八代,GPU1660
软件环境:Ubuntu16.04,ROS(kinetic)
1.安装英伟达驱动
1.1 在英伟达官网驱动页面下寻找自己显卡的驱动(型号一定要查询清楚)https://www.geforce.cn/drivers
以GTX1660为例:
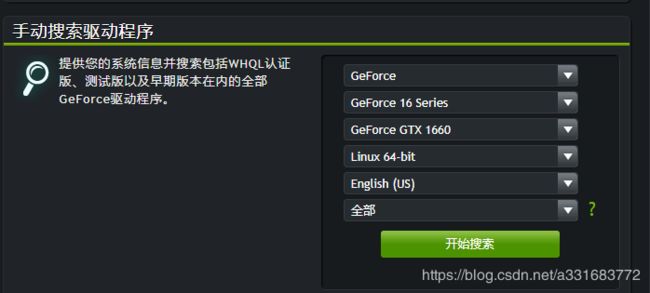
点击搜索后任意下载其中一个即可:

1.2 下载完成后,首先卸载卸载所有系统自己安装的 nvidia 驱动和第三方的GPU驱动
sudo apt-get remove --purge nvidia*
编辑blacklist.conf文件
sudo vim /etc/modprobe.d/blacklist.conf
添加以下内容
blacklist amd76x_edac
blacklist vga16fb
blacklist nouveau
blacklist nvidiafb
blacklist rivatv
然后执行
sudo update-initramfs -u
重启后
lsmod | grep nouveau
查看是否为空。
1.3 开始安装
首先关闭图形界面
(不然会报错:You appear to be running an X server; please exit X before…)
进入ubuntu后Ctrl+Alt+F1进入命令行界面 ,同时 su root 进入管理员模式进行安装,进入到安装包所在的目录后执行以下操作:
sudo service lightdm stop
#关闭图形界面
sudo chmod a+x NVIDIA-Linux-x86_64-390.77.run
#后面的驱动要改为你自己的驱动,可在输入NVIDIA后按下Tab键自动补全
$sudo ./NVIDIA-Linux-x86_64-390.77.run
#开始安装
注意:如果安装N卡驱动后系统卡在登陆界面或开机黑屏,可尝试添加–no-opengl-libs参数重新安装驱动。(sudo ./NVIDIA-Linux-x86_64-390.77.run --no-opengl-libs )。不是N卡输出显示的话一定要加–no-opengl-libs 。
在安装驱动的时候,有一布问你”Would you like to run the nvidia-xconfig utility to automatically update your X configuration file…”什么的,选择 No。
然后顺序安装就可以了,安装完成后重启。
如果遇到循环登陆问题 http://www.cnblogs.com/talugirl/p/5870875.html
重启后输入命令:
nvidia-smi
出现

安装成功(注:没有安装CUDA则左上角没有 CDUA Version:10.1)
2.安装CUDA
2.1 下载cuda
在英伟达官网 https://developer.nvidia.com/cuda-toolkit-archive 选择合适的版本进行下载

下载完成后,进入到文件所在的目录:
sudo sh cuda_10.0.130_410.48_linux.run
注意:选择安装列表时把显卡驱动选项去掉

然后忽略一切警告,一路安装即可。
2.2 添加环境变量
打开bash
sudo vim ~/.bashrc
在最后添加下面语句(版本不同修改相应版本即可,下面是添加10.0的):
export PATH=/usr/local/cuda-10.0/bin${PATH:+:${PATH}}
export LD_LIBRARY_PATH=/usr/local/cuda-10.0/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
保存退出后
source ~/.bashrc
2.3 测试
依次运行以下语句
cd /usr/local/cuda/samples/1_Utilities/deviceQuery
sudo make
./deviceQuer
出现下面结果运行成功:

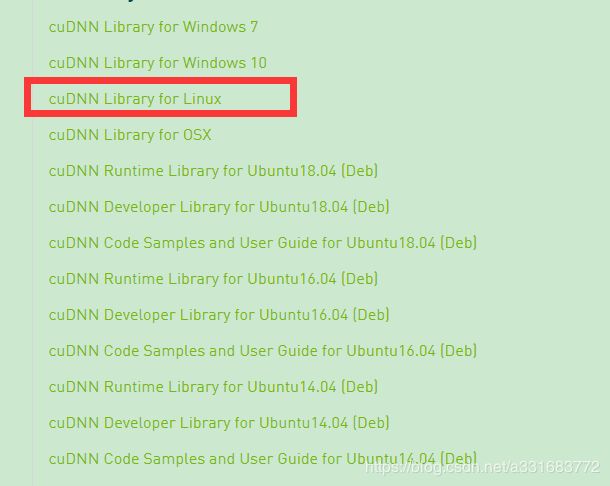
3.安装cudnn
在英伟达官网下载对应CUDA版本的cudnn,下载需要注册登陆:https://developer.nvidia.com/cudnn
不要下载DEB版本的文件下载后缀为 .solitairetheme8的文件:
下载完成后进入到文家所在目录,把文件后缀改为.tgz格式:
mv cudnn-10.0-linux-x64-v7.3.0.29.solitairetheme8 cudnn-10.0-linux-x64-v7.3.0.29.tgz
然后解压
tar -zvxf cudnn-10.0-linux-x64-v7.3.0.29.tgz
进入到解压后的文件(是cudnn解压后的):
进入到include目录下(可能只有cudnn.h一个文件)
sudo cp *.h /usr/local/cuda/include/
进入到lib64目录下
sudo co ./* /usr/local/cuda/lib64/
然后提升权限:
sudo chmod a+r /usr/local/cuda/include/cudnn.h
全部配置完成!
4.安装Tensorflow(GPU版本)
4.1 更换PIP的源,不然安装太慢
根目录创建.pip文件:
mkdir ~/.pip
创建文件pip.conf:
vim .pip/pip.conf
复制信息:
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple
trusted-host = pypi.tuna.tsinghua.edu.cn
4.2 安装Tensorflow
输入以下命令默认安装最新版本Tensorflow
pip install tensorflow-gpu
安装完成后在python脚本下:
import tensorflow
没有任何提示则安装成功。
5(选做) 安装google-cloud-sdk
sudo snap install google-cloud-sdk --classic
安装Google Vision API(需要谷歌账号才能使用)
pip install --upgrade google-cloud-vision
在谷歌 https://console.cloud.google.com/projectselector/apis/credentials?folder&organizationId=0&supportedpurview=project生成个人密钥
随便创建一个项目,选择这个项目。

下载JSON文件到本地。
然后在用之前使用以下命令,在验证身份时找到JSON文件:
export GOOGLE_APPLICATION_CREDENTIALS="/home/user/Downloads/[FILE_NAME].json"
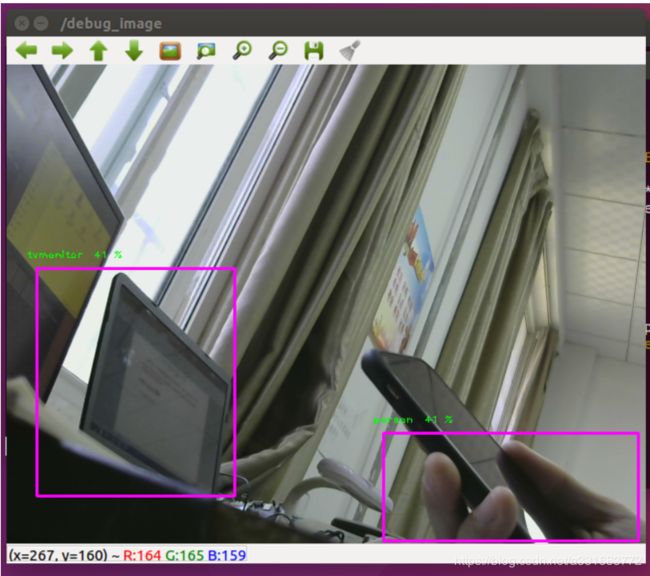
二.简单例程
在简单实用yolo模型进行识别,在ros框架用电脑自带的摄像头进行识别下,首先创建简单的ros功能包,调用yolo模型后,结果如下:
(其他原因代码不公开,需要的话私聊)