Apollo进阶课程㉘丨Apollo控制技术详解——基于模型的控制方法
原创: 阿波君 Apollo开发者社区 8月22日

PID控制是一个在工业控制应用中常见的反馈回路部件,由比例单元P、积分单元I和微分单元D组成。PID控制的基础是比例控制;积分控制可消除稳态误差,但可能增加超调;微分控制可加快大惯性系统响应速度以及减弱超调趋势。
上周阿波君为大家详细介绍了「进阶课程㉗Apollo控制技术详解——控制理论」。
主要介绍Apollo控制相关内容,包括常用控制理论、功能限制与未来趋势、相似原理在不同模块中的应用。目的是让大家了解控制模块的整体脉络及理论,通过案例讲解将理论转化成code及真正测试标准的方法。
本周阿波君将继续与大家分享Apollo控制技术详解——基于模型的控制方法的相关课程。下面,我们一起进入进阶课程第28期。
相对于简单的PID控制,Apollo里面更多使用基于模型的控制方法,它包括四个部分:建模、系统辨识、控制器设计和参数调优。本节主要介绍前三个部分,如图1所示。
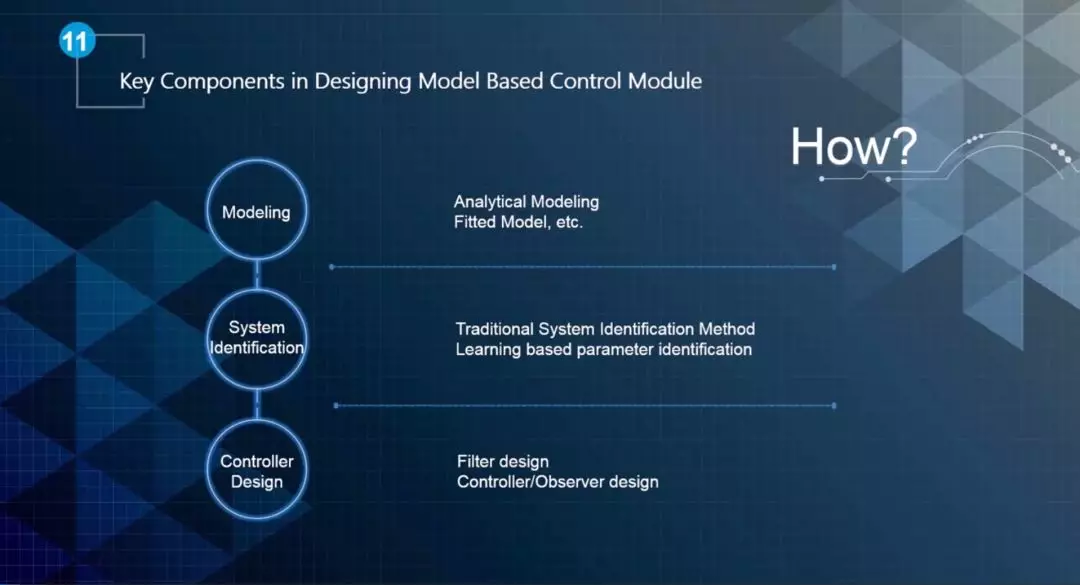
▲图1 设计基于模型的控制模块的关键步骤
1.建模
Modeling一般可以分为分析建模和拟合建模。通常,一个模型主要由各种属性表示,如图2所示,主要包括描述输入输出的数量、模型是线性还是非线性、连续还是离散等特性。
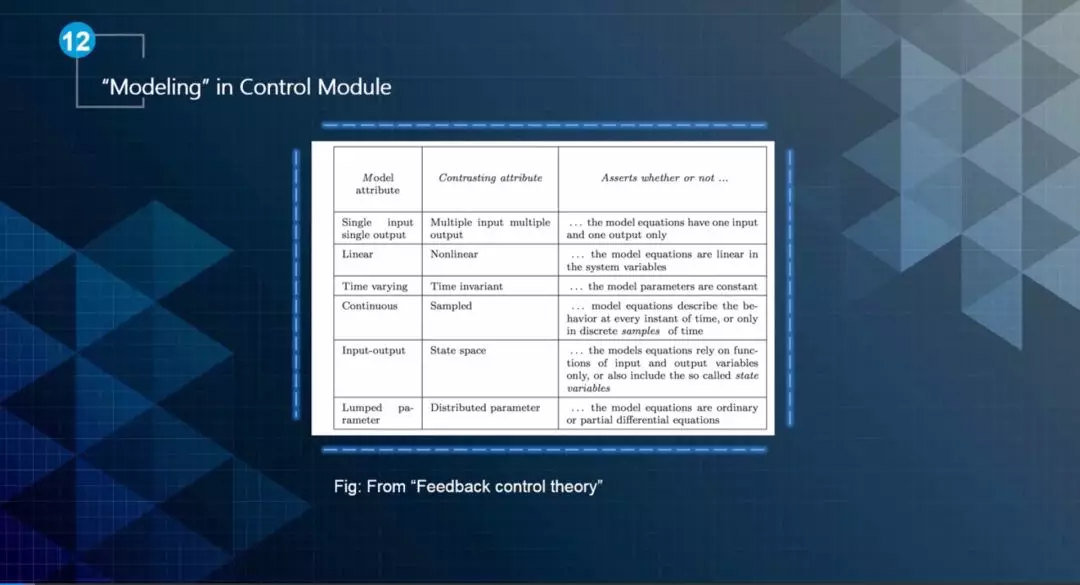
▲图2 模型的属性表示
控制模块中的模型,通常包括运动学模型和动力学模型。运动学模型是一种几何模型,感知、预测讨论的模型则以运动学模型为主。而在控制模块中,更多考虑动力学模型。实际上,运动学模型是动力学模型的一个子集。

▲图3 运动学模型和动力学模型
在自动驾驶中,Dynamic model以Kinematics model为初始模型,将环境等参数设置到Kinematics model中,把车看作质点进行分析。Dynamic model将车按车轮等部分分开进行约束或者系统补偿。
图4是两个比较简单的几何模型,左图是一个综合移动机器人控制模型,右图是著名的自行车模型,它把汽车看作只有两个轮胎的自行车,该模型在当年的DARPA挑战赛上获得冠军。

▲图4 两个几何模型
实际上,只考虑几何约束是不够的。下图是一个动力学模型,它不仅考虑了几何约束,还考虑了力矩和扭矩平衡。如图5所示,在自行车模型中,把前后轮都在XY两个方向进行分解。

▲图5 动力学模型
图6是刚体的一些力矩分析以及扭矩分析的公式,总体满足牛顿第二定律。

▲图6 力矩与扭矩分析公式
在假设纵向速度为0的情况下,我们可以对横向方程进行线性化,如图7所示。线性化的过程需要基于一些假设。大家一定要记住,做完控制之后要检查这些假设是否合理或者是否会造成很大的误差。

▲图7 模型线性化
通常情况下,模型的建立是基于误差,而不是参考值,如图8所示,对实际侧向加速度和理想侧向加速度之间的误差进行建模。
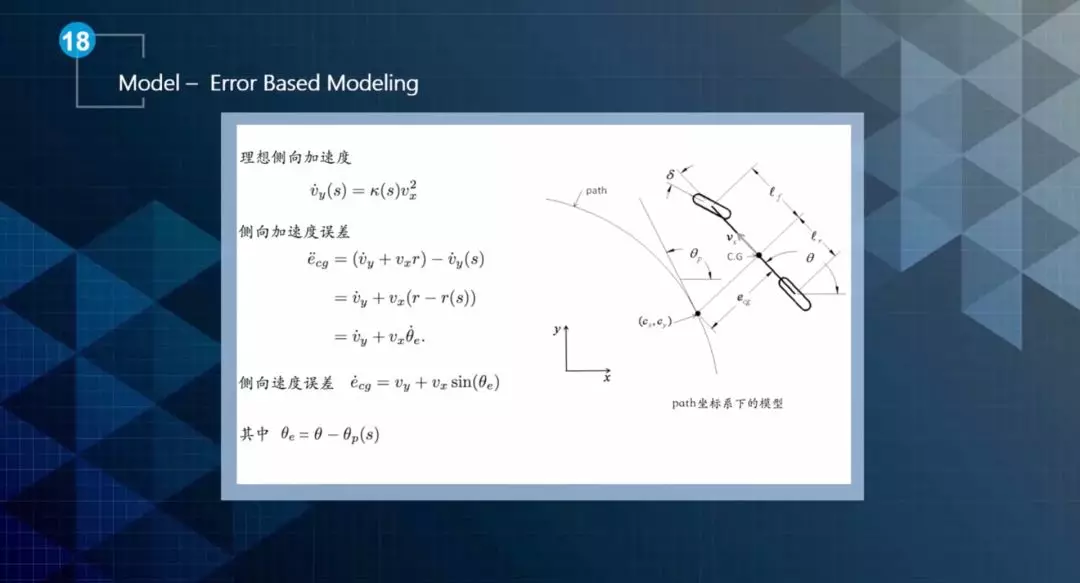
▲图8 基于误差的建模
在控制器实现过程中,通常会将ODE或者PDE方程进行处理,转化为矩阵计算的形式。虽然在数学表达形式上不一致,但是其物理含义保持不变,如图9所示。在状态空间表示中还会给出一些状态量的标识,包括输入量。
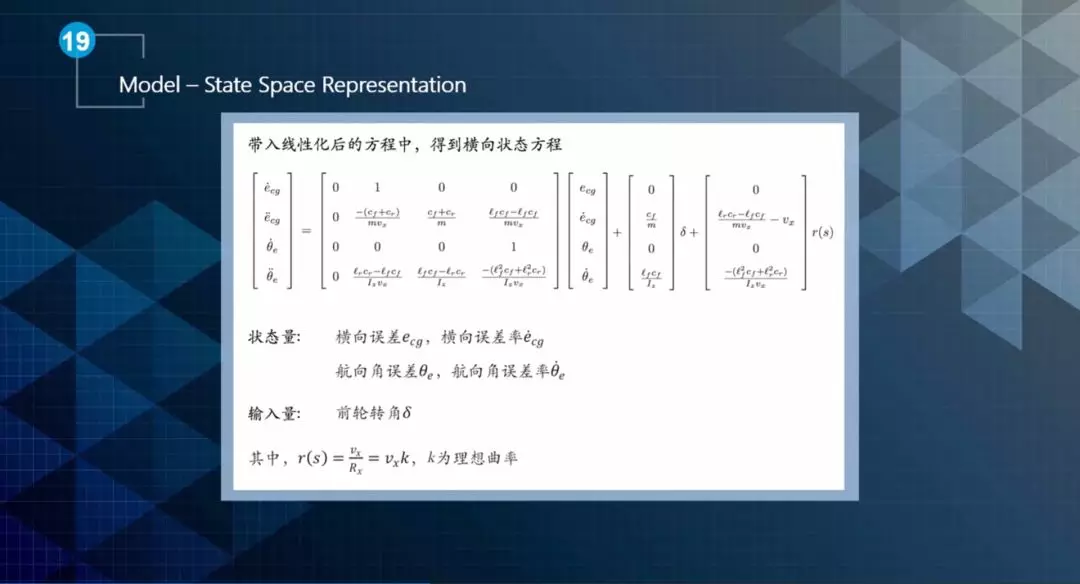
▲图9 状态空间表示
关于汽车的动力学模型,感兴趣的可以参考以下文献。

▲图10 车辆动力学模型相关参考文献
2.系统辨识
▲图11 系统辨识
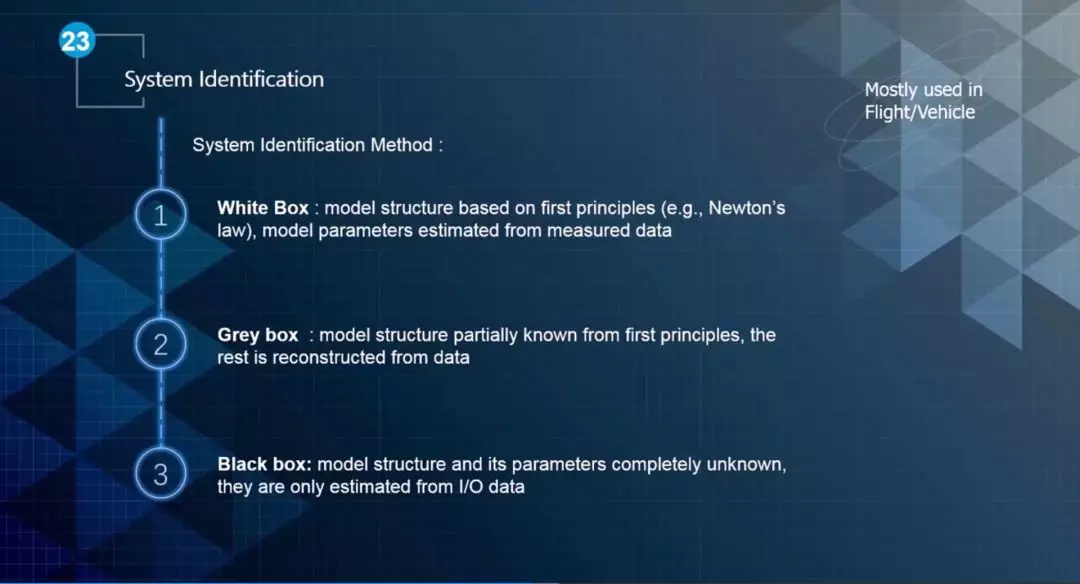
在模型中,有些参数是未知的,系统辨识的目的是确定这些未知参数的值。确定未知参数的方法有三种:白盒、灰盒以及黑盒方法。
白盒方法是指对于基于第一原理(如牛顿定律)的模型结构,可以由测量数据估计模型的参数。
灰盒方法是用于只有部分模型结构可知,通过数据重建的方法来获取模型的其它部分的方法。
黑盒方法是指模型结构和参数都在未知的情况下,只能通过输入输出数据来估计的方法。
关于白盒和黑盒方法,更多的可以参考以下资料。

▲图12 白盒和黑盒方法的参考资料
基于学习的系统辨识方法可以参考以下资料,仔细分析,我们会发现基于学习的辨识方法和黑盒方法很类似。

▲图13 基于学习的系统辨识方法参考资料
3.控制器设计
基于模型的控制模块设计第三步是控制器的设计,包括滤波器设计、控制器设计以及观察器设计等。
滤波器可以分为线性和非线性,数字滤波或者模拟信号滤波,离散滤波或者连续滤波等,如图14所示。
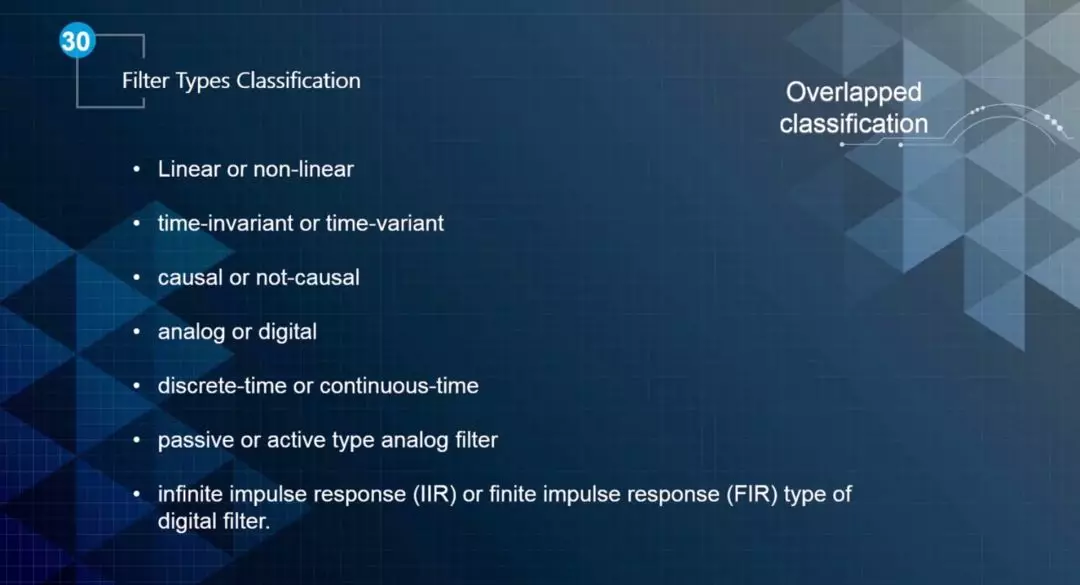
▲图14 滤波器分类
前面已经介绍,系统在频域里面需要满足某些性能要求,滤波器通常也会对频域信号进行处理。根据频域边界,我们可以对滤波器进行进一步细分,如图15所示,包括低通滤波,高通滤波等。

▲图15 低通滤波和高通滤波
根据实现方式不同,滤波器又可以分为高斯滤波、卡尔曼滤波、贝叶斯滤波等,如图16所示,这些滤波器通常用于预测和跟踪。
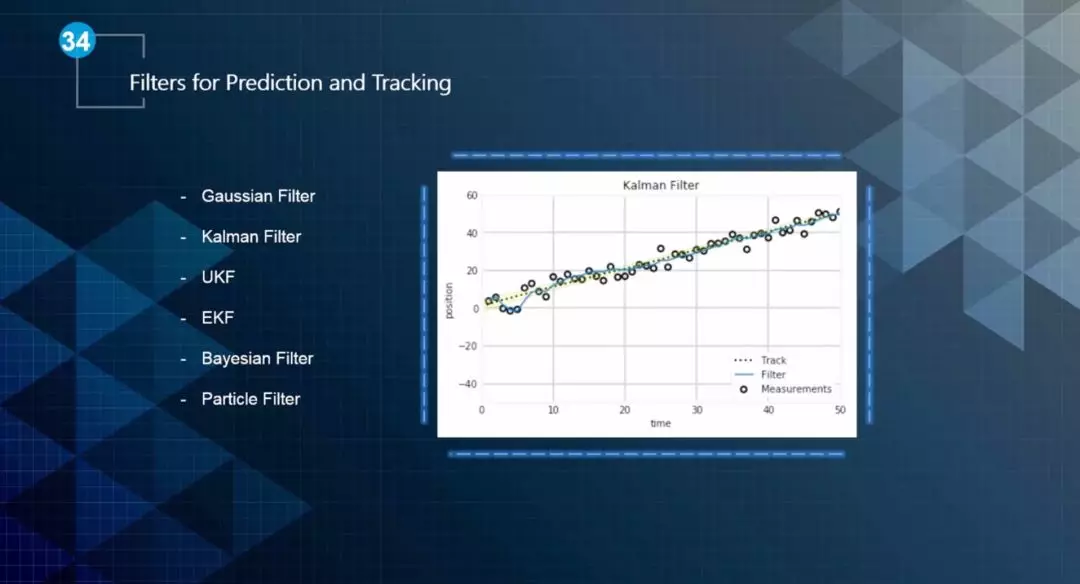
▲图16 用于预测和跟踪的滤波器