【一起来玩RTOS系列】之RT-Thread Nano快速创建工程
RT-Thread Nano是RT-Thread的精简版,只有内核、shell(msh)、设备驱动三大功能,以Keil5的pack形式发布。RT-Thread Nano在保证了具备完整功能的RTOS实时内核的前提下实现了极小的FLASH和RAM占用,默认配置下,FLASH可小至2.5KB, RAM可以小至1KB,对于当今主流32位MCU/SoC来说,跑起来毫无压力。
下面就跟随小编一起,看看如何在机智云gokit智能硬件开发板上将RT-Thread Nano跑起来吧~
一、RT-Thread Nano Pack安装
1. 使用STM32CubeMX创建一个可以点亮板载LED的基本工程,参考:http://club.gizwits.com/thread-3859-1-1.html
2. 在MDK5主界面上点击“Pack Install”按钮,进入Pack Install界面:
3. 在Pack Install界面下,RT-Thread Pack在右边栏中。点击“Install”可下载,点击“Update”可更新。
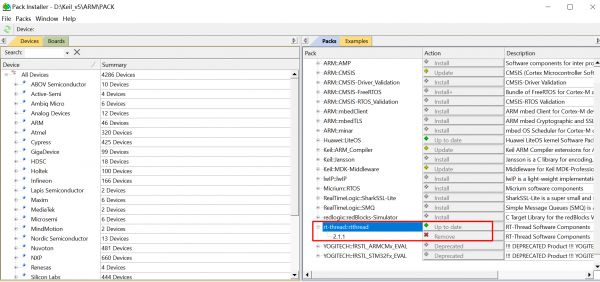
4. 如果在上图界面“Packs”栏中未发现“RT-Thread”,通过两种方法获取RT-Thread Pack。
第一种方法是直接从http://www.rt-thread.org/downloa ... rtthread.2.1.1.pack下载2.1.1版本的的RT-Thread Pack,然后双击完成安装。
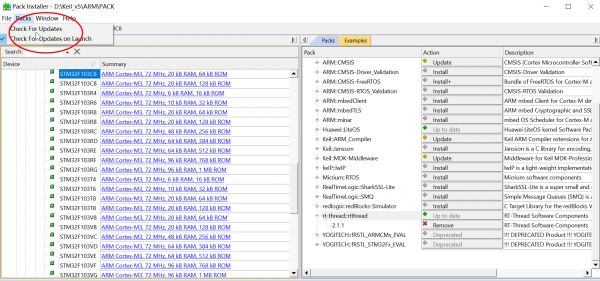
第二种方法是在菜单“Packs”下点击“Check for Updates”,Update完成后,将可看到RT-Thread Pack,然后下载Pack再安装它。
二、kernel加载与应用
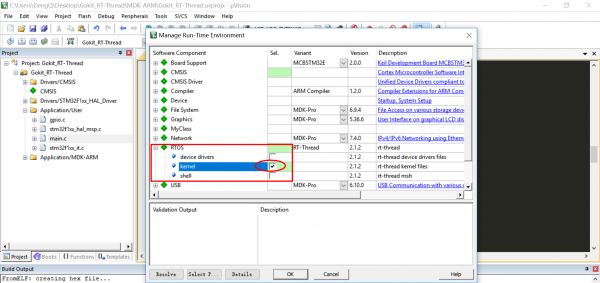
1. 在主界面点击“ManageRun-TimeEnvironment”进入加载页:
在“RTOS”一栏中选中“RT-Thread”,并在列表中选中“kernel”:
2. 确定后,RT-Thread的kernel文件会被自动添加进来:
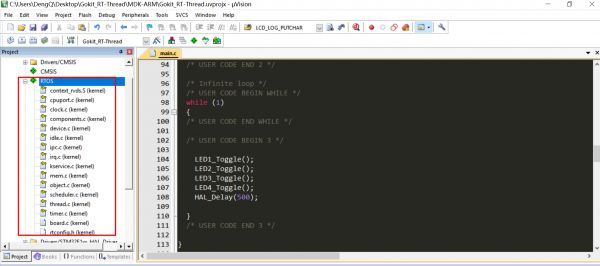
Kernel文件包括:
clock.c
components.c
device.c
idle.c
ipc.c
irq.c
kservice.c
mem.c
object.c
scheduler.c
thread.c
timer.c
Cortex-M芯片内核移植代码:
cpuport.c
context_rvds.s
应用代码及配置文件:
board.c
rtconfig.h
三、修改源码适配机智云Gokit
1.需要做一些微小的修改才能在Gokit上跑起来:
1)修改Application/User分组下的stm32f1xx_it.c文件,删除如下3个函数:
|
1
2
3
|
void
HardFault_Handler(
void
);
void
PendSV_Handler(
void
);
void
SysTick_Handler(
void
);
|
2)修改RTOS分组下的board.c上文件:
修改第24行为:
- #include "stm32f1xx_hal.h"
修改第66行:取消注释,并加入2行代码如下。
|
1
2
3
4
5
6
7
8
9
10
11
12
13
|
void
SysTick_Handler(
void
)
{
/* enter interrupt */
rt_interrupt_enter();
HAL_SYSTICK_IRQHandler();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
|
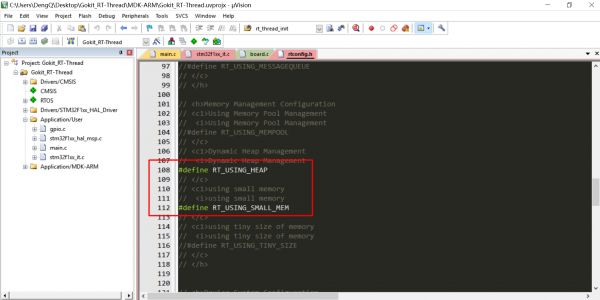
3)在rtconfig.h使能动态内存管理:
此外,第15行,修改RT_TICK_PER_SECOND为1000。
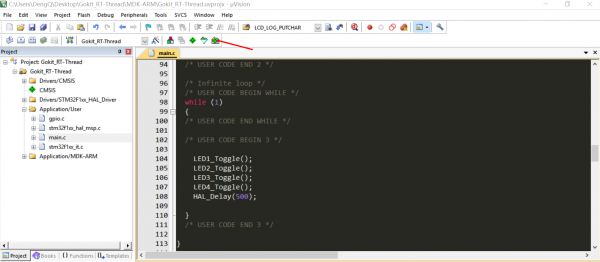
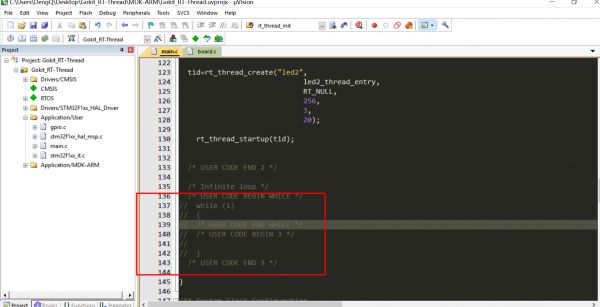
2. 修改main.c文件,屏蔽掉while(1)死循环,加入测试代码:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
|
/**
****************************************************
* File Name : main.c
* Description : Main program body
****************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2017 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
****************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_hal.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
#include "rtthread.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void
SystemClock_Config(
void
);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
//线程LED1
static
void
led1_thread_entry(
void
* parameter)
{
while
(1)
{
LED1_Toggle();
rt_thread_delay(500);
//延时
}
}
//线程LED2
static
void
led2_thread_entry(
void
* parameter)
{
while
(1)
{
LED2_Toggle();
rt_thread_delay(100);
//延时
}
}
/* USER CODE END 0 */
int
main(
void
)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
rt_thread_t tid1=RT_NULL;
//线程句柄
rt_thread_t tid2=RT_NULL;
//线程句柄
//创建动态线程
tid1=rt_thread_create(
"led1"
,
//线程名字
led1_thread_entry,
//线程入口函数
RT_NULL,
//线程参数
256,
//线程栈大小
3,
//线程优先级
20);
//线程时间片
//启动线程
rt_thread_startup(tid1);
//创建动态线程
tid2=rt_thread_create(
"led2"
,
//线程名字
led2_thread_entry,
//线程入口函数
RT_NULL,
//线程参数
256,
//线程栈大小
4,
//线程优先级
20);
//线程时间片
//启动线程
rt_thread_startup(tid2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
// while (1)
// {
// /* USER CODE END WHILE */
// /* USER CODE BEGIN 3 */
//
// }
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void
SystemClock_Config(
void
)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if
(HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if
(HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void
_Error_Handler(
char
* file,
int
line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while
(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void
assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/**************** (C) COPYRIGHT STMicroelectronics ****END OF FILE***/
|
测试代码使用RT-Thread的动态线程创建函数rt_thread_create()创建了2个线程,在线程里面间隔不同的时间翻转LED。
将程序下载到开发板,可以看到LED1和LED2不同频率闪烁: