基于Linux的Socket编程之TCP全双工Server-Client聊天程序
一、引言:
由于accept函数、read、write、recv、send等函数都是是阻塞式的,在同一个进程之中,只要有任何一个函数没有执行完毕,处于阻塞状态,之后的函数与功能就不能处理,很难实现点对点的Server-Client全双工通信。因为全双工通信是非阻塞式的通信方式,即使对方没有回复消息,都可以随时发送。如果只是电报机式的半双工通信,之前已经基本实现:基于Linux的SOCKET编程之TCP半双工Client-Server聊天程序
而对于QQ点对点聊天式的全双工通信,又该怎样实现呢?对于当前所学只能想到使用fork函数创建一个子进程,其中父进程用来处理发(或者收),而子进程用来处理收(或者发)的过程。fork函数的一些基本的使用可参照:进程创建与fork()的恩怨情仇
二、测试代码:
测试环境(Redhat 6.4)
1、客户端(Client):
# include2、服务器(Server):
# include收到对端结束信息(NULL信息)的进程要向等待发送的进程发送一个结束通信的信号,回调函数处理使得等待输入的进程结束,否则该进程会一直等待,直到有输入(但此时的输入已经没有意义,所以应提早结束,而不是一直等待)。
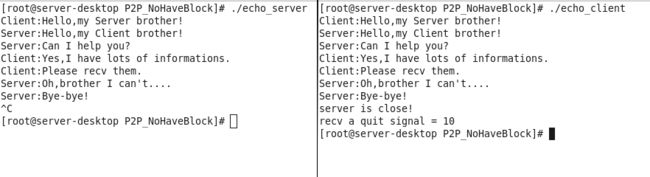
三、测试结果:
这个不厚道的服务器结束了通信: