相机姿态估计(五)--DLS
论文:A Direct Least-Squares (DLS) Method for PnP
求解过程看着挺吃力的,看懂的还请多多指正。
本文针对PnP问题,采用非线性最小二乘直接计算,主要贡献如下:
1.提出通用的n点(n≥3)姿态(all pose)计算方法,设计了独特的非线性最小二乘代价函数。
2.无初始化要求,性能接近极大似然(MLE)方法的结果
3.非线性最小二乘代价函数不依赖点数变化。
具体过程如下:
1.问题建模

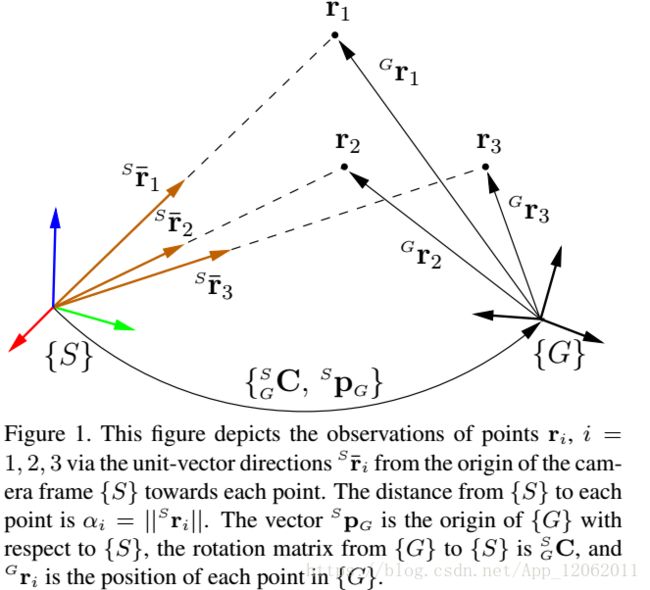
这里的定义,跟其他如AP3P是一样的,就是换了个字符,S是sensor的意思,就是相机坐标系,G还是参考坐标系。z是像素坐标系中测量点的方向向量,后面![]() 是噪声。C还是旋转矩阵,P是平移向量,下图是PnP问题最轻量化的描述。
是噪声。C还是旋转矩阵,P是平移向量,下图是PnP问题最轻量化的描述。
整体的PnP非线性最小二乘求解建模如下:

其中代价函数J是均方误差和:

难点在于如何求解J的最小值,通常有给定一个参数的初始猜测值,然后不断迭代如(如GN算法),但这不能保证一定会获得精确值,还有利用KKT条件(SVM中的支持向量的求解算法中有用到)来求非线性系统,但是,这里难点在于位置参数过多(6+n),而本文提出的方法如下:
1.修改LS模型:
先考虑无噪声情况:

其中未知参数有α,C,P,我们重写成矩阵运算形式:
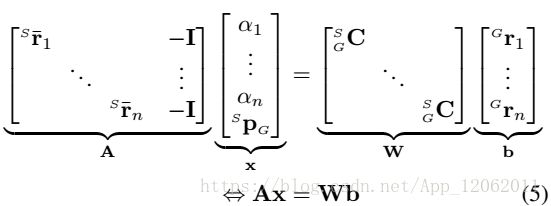
根据上面,计算P和α:

注意,P和α,都是旋转矩阵C的线性函数:

因此,我们重写式子4:

这样,我们将未知参数,从6+n减少到了3。
接着,我们采用CGR 参数化旋转矩阵C,使得3个CGR变量成为无约束优化变量。同时满足:
![]()
![]()
CGR参数化C(s=[s1,s2,s3]^T):
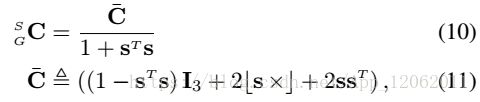
因此,9式可以表示 为:
![]()
由于C(s)导致线性化,因此,继续简化:
![]()
式13就是最终化简后的约束条件。
2.修改代价函数
利用13式,我们重新定义代价函数J,来计算CGR的旋转参数s,先增加噪声:

基于15式,PnP问题,重构为下面无约束的LSM问题:
![]()
其中,新的![]() 定义为:
定义为:
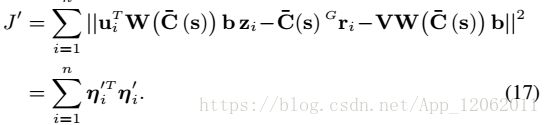
注意,这里![]() 是一个4阶多项式,包含如1,s1,s2,s3,...s1^4,s2^4,s3^4等项。
是一个4阶多项式,包含如1,s1,s2,s3,...s1^4,s2^4,s3^4等项。
下面介绍作者直接计算多项式最小值的过程:
考虑到目标函数3个位置参数的4阶多项式,因此,优化方程定义为:
![]()
为了构造Maculy矩阵,作者对目标函数增加了i=0项,F0= u0 + u1s1 + u2s2+ u3s3,这里u是随机生成的,这样,原始目标函数被扩展为7个单项式组成:

然后 ,作者将参数S集合,划分为4个集合,其中,S3集合包含所有可以被 s3^3整除的项,S2集合包含所有可以被s2^3整除但不能是s3^3,以此类推,S0集合包含所有未划分的剩余项。
之后,扩展多项式Fi为Gi:
假定原始系统的解为p,则所有扩展自F的多项式G,都为0,即F(p) = 0.但是,F0不会是0:
矩阵分解式21:

最终:

其中:
![]()
从式23可以看出,F0(p)是Mf0的一个特征值,对应的特征向量p^α。我们可以直接获得式18的27个解。
因为S0是1,因此将特征向量以第一个项归一化,以此求解出S1,S2,S3。
实际上,这27组解,只有4个是真实局部最优,大多数情况下,n≥6时,我们只能获取一个真实解。之后,根据该解计算代价,如此实现直接计算最优化。
另外,DLS-LM是在上面求解时,采用LM迭代算法,其他与DLS类似。
作者对比了NPL,SDP,EPnP,DLS,DLS-LM等算法,点的分布视角45°*45°,并模拟了高斯噪声。效果如下:
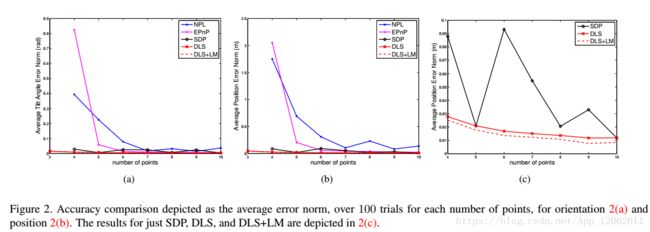
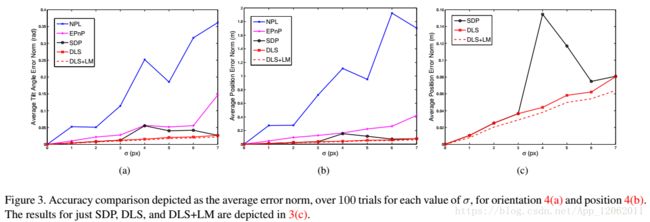
从这里可以看出,NPL,SDP基本不用考虑了。当点数超过6时,DLS与EPnP的差距也不明显了,剩下的可以对比下时间。