第一课:一文读懂马尔科夫过程
1.马尔科夫决策过程(MDPs)简介
马尔科夫决策过程是对强化学习(RL)问题的数学描述。几乎所有的RL问题都能通过MDPs来描述:
- 最优控制问题可以用MDPs来描述;
- 部分观测环境可以转化成POMDPs;
- 赌博机问题是只有一个状态的MDPs;
注:虽然大部分DL问题都能转化为MDPs,但是以下所描述的MDPs是全观测的情况。
强化学习中的表述符号:

2.马尔科夫性
只要知道现在,将来和过去条件独立
定义:如果在t时刻的状态St满足如下等式,那么这个状态被称为马尔科夫状态,或者说该状态满足马尔科夫性。
![]()
- 马尔科夫性的要点:
- 状态St包含了所有历史相关信息
- 或者说历史的所有状态的相关信息都在当前状态St上体现出来
- 一旦St知道了,那么S1,S2, ... ,St-1都可以被抛弃
- 数学上可以认为:状态时将来的充分统计量
- 因此,这里要求环境时全观测
例子:
- 下棋时,只关心当前局面
- 打俄罗斯方块时,只关心当前屏幕
有了马尔科夫状态之后
- 定义状态转移矩阵
- 忽略时间的影响,只需要关心当前状态即做出下一步决策
注:这里的相关指问题相关,可能有一些问题无关的信息没有在St中;马尔科夫性和状态的定义息息相关。
3.状态转移矩阵
定义:状态转移概率是指从一个马尔科夫状态s跳转到后继状态s'的概率:![]()
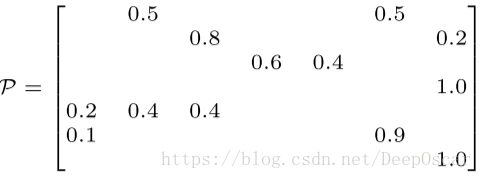
所有的状态组成行,所有的后继状态组成列,将得到状态转移矩阵:
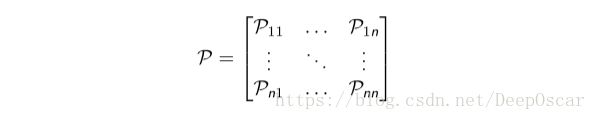
其中,n表示状态的个数,由于P代表了整个状态转移的集合,所以用个花体。每行元素相加等于1。
我们也可以将状态转移概率写成函数的形式:![]()
其中![]() ,状态数量太多或者是无穷大(连续状态)时,更适合用状态转移函数,此时,
,状态数量太多或者是无穷大(连续状态)时,更适合用状态转移函数,此时,![]() 。
。
4.马尔科夫过程
一个马尔科夫过程(MP)是一个无记忆的随机过程,即一些马尔科夫状态的序列。
定义:马尔科夫过程可以由一个二元组定义
S表示了状态集合,P描述了状态转移矩阵![]() 。
。
注,虽然我们有时候不知道P的具体值,但是通常我们假设P存在且稳定的。
当P不稳定时,不稳定环境,在线学习,快速学习。
举个栗子:
一个学生每天需要学习三个科目,然后通过测试。不过也有可能只学完两个科目之后直接睡觉,一旦挂科有可能需要重新学习某些科目。用椭圆表示普通状态,每一条线上的数字表示从一个状态跳转到另一个状态。方块表示终止状态。终止状态有两种:1是时间终止,2是状态终止。
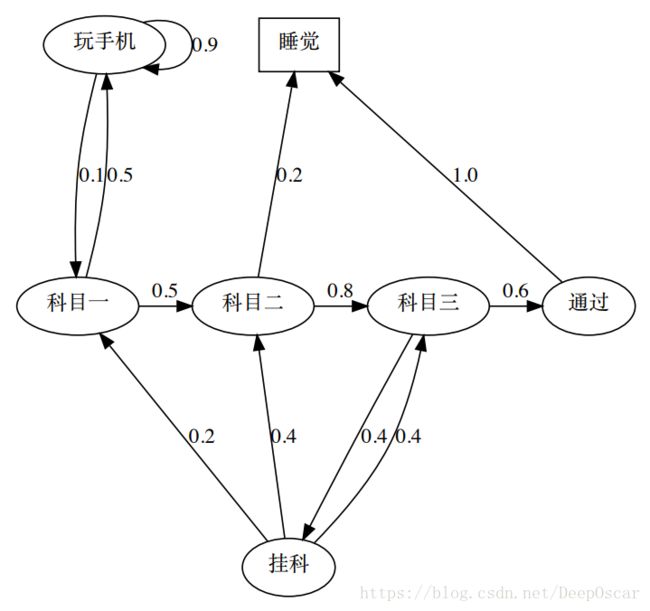
由于马尔科夫郭晨够可以用图中的方块和线条组成,所以可以称马尔科夫过程为马尔科夫链(MDPs chain)。
6.片段
片段定义:强化学习中,从初始状态S1到终止状态的序列过程,被称为一个片段(episode),S1, S2,... ,ST
- 如果一个任务总以终止状态结束,那么这个任务被称为片段任务;
- 如果一个任务没有终止状态,会被无限执行下去,这被称为连续性任务。
还是来看上面的例子:
假设初始状态是“科目一”,从这个马尔科夫链中,我们可能采样到如下的片段:
- “科目一”,“科目二”,“睡觉”
- “科目一”,“科目二”,“科目三”,“通过”,“睡觉”
- “科目一”,“玩手机”,“玩手机”,…, “玩手机”,“科目一”, “科目二”, “睡觉”
- “科目一”,“科目二”,“科目三”,“挂 科”,“科目二”,“科目三”,“挂科”,挂科“科目一”,“科目二”,“科 目三”,“挂科”, “科目三”,“通过”, “睡觉”
分别用 s1 ∼ s7 代表 “科目一”, “科目二”, “科目三”, “通过”, “挂科”, “玩手机”, “睡觉”
7.马尔科夫奖励过程(MRP)
马尔可夫过程主要描述的是状态之间的转移关系,在这个转移关系上 赋予不同的奖励值即得到了马尔可夫奖励过程。
定义:马尔可夫奖励 (Markov Reward Process, MRP) 过程由一个四元组组成 〈S, P,R, γ〉。
- S 代表了状态的集合
- P 描述了状态转移矩

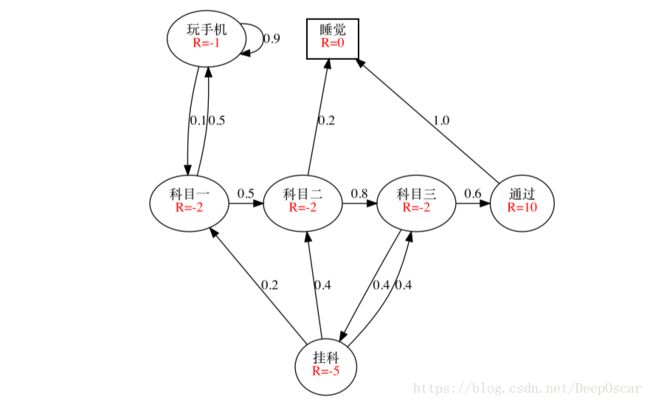
- R 表示奖励函数,R(s) 描述了在状态 s 的期望奖励,
 ,某一个状态的
,某一个状态的 - γ 表示衰减因子,γ ∈ [0, 1]
注,以上要注意R和R的区别
马尔可夫奖励过程的例子:
8.回报值
奖励值:对每一个状态的评价;
回报值:对每一个片段的评价。
定义:回报值(return Gt)是从时间t处开始的累计衰减奖励
对于片段性任务:![]()
对于连续性任务:![]()
片段的统一化表达:

终止状态等价于自身转移概率为1,奖励为0的状态
因此我们能够将片段任务和连续性任务统一表达:

这里T=∞时,表示连续性任务,否则即为片段性任务。
9.衰减值
为什么我们要使用遮掩给定指数衰减?
直观感觉
影响未来的因素不仅仅包含当前
我们对未来的把握也时逐渐衰减的
一般情况下,我们更关注短时间按的反馈
数学便利
- 一个参数就描述了整个衰减过程,只需要调节一个参数γ既可以调节长时间奖励的权衡(trade-off)
- 指数衰减形式又很容易进行数学分析
- 指数衰减是对回报值的有界保证,避免了循环 MRP 和连续性 MRP 情况下回报值变成无穷大
10.值函数
为什么要值函数?
- 回报值是一次片段的结果,存在很大的样本偏差
- 回报值的角标是t,值函数关注的是状态s
定义:一个MRP的值函数定义:![]()
- 这里的值函数针对的是状态s,所以称为状态值函数,又称为V函数;
- Gt是一个随机变量
- 这里使用小写的v函数,代表了真实存在的值函数
通过一个例子比较值函数和回报值:
针对初始状态S1=“科目一”,且γ=0.5计算不同片段的回报值

虽然都是从相同的初始状态开始,但是不同的片段有不容的回报值,而且值函数是他们的期望值。
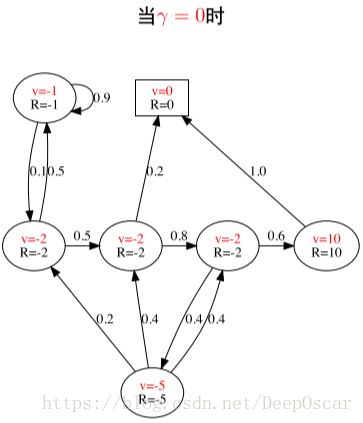
针对上述例子当γ取不同的值时对应的V值函数如下图:
11.MRPs 中的贝尔曼方程
值函数的表达式可以分解成两个部分
- 瞬时奖励 Rt+1
- 后继状态 St+1 的值函数乘上一个衰减系数
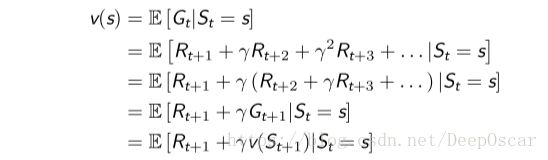
- 体现了v(s)与v(St+1)之间的迭代关系
- 这是强化学习中的核心理论之一
- 注意s小写,St+1大写
如果我们已知转移矩阵P,那么
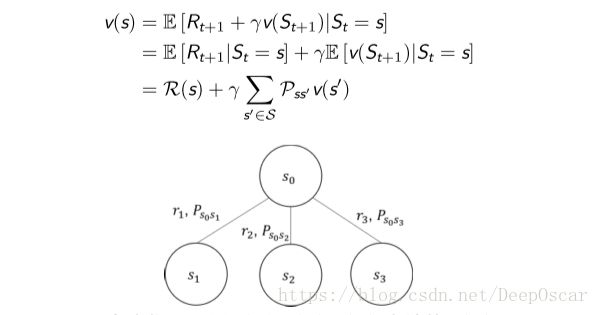
图中我们可以用 v(s1), v(s2), v(s3) 去计算 v(s0),由后继状态的值函数计算当前状态的值函数。
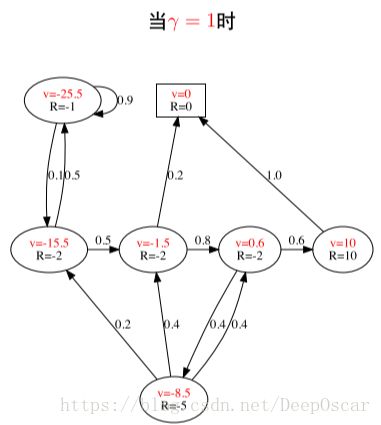
当γ=1时,我们根据以下例子计算值函数:
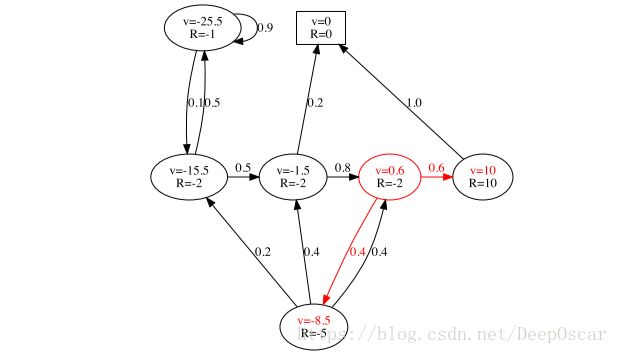
套用公式![]()
![]() ,红框状态的值函数v = -2+0.6*10+0.4*-8.5 = 0.6。
,红框状态的值函数v = -2+0.6*10+0.4*-8.5 = 0.6。
12.贝尔曼方程的矩阵形式
使用矩阵-向量的形式表达贝尔曼方程,即:![]()
假设状态集合为 S = {s1, s2, . . . , sn},那么

贝尔曼方程本质上是一个线性方程,可以直接求解:

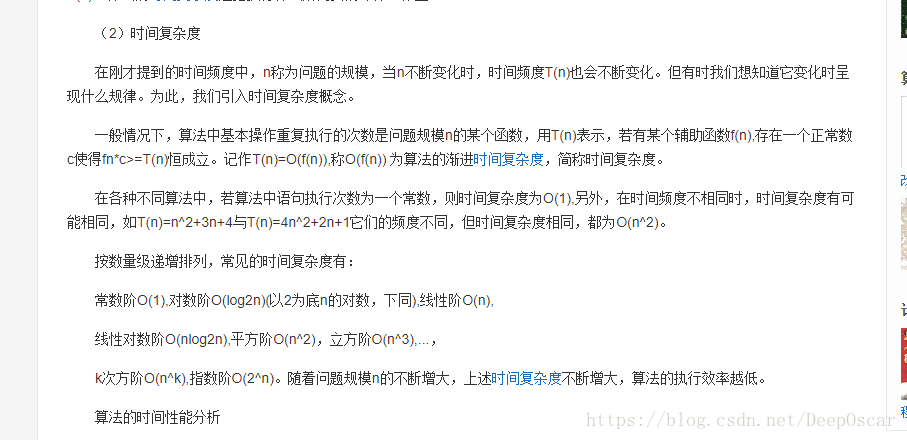
- 计算复杂度O(n^3)
- 要求已知状态转移矩阵P
- 直接求解的方式仅限于小的MRPs
注:计算复杂度:
马尔科夫过程的最终目的是要产生决策,因此需要重点讨论马尔科夫决策过程
13.马尔科夫决策过程
马尔科夫决策过程(MDP)与MP、MRP的区别
- 在MP和MRP中,我们都是作为观察者,去观察其中的状态转移现象,去计算回报值
- 对于一个RL问题,我们更希望去改变状态转移的流程,去最大化回报值
- 通过MRP中引入决策即得到了马尔科夫决策过程
马尔科夫决策过程定义:一个马尔科夫决策过程由一个五元组构成 〈S, A, P,R, γ〉。
- S 代表了状态的集合;A 代表了动作的集合;P 描述了状态转移矩阵
 ;
; - R 表示奖励函数,R(s, a) 描述了在状态 s做动作 a的奖励,
 ;
; - γ 表示衰减因子,γ ∈ [0, 1]
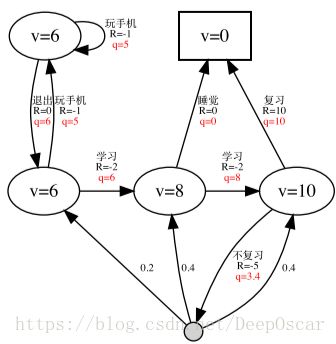
举个栗子说明马尔科夫决策过程:
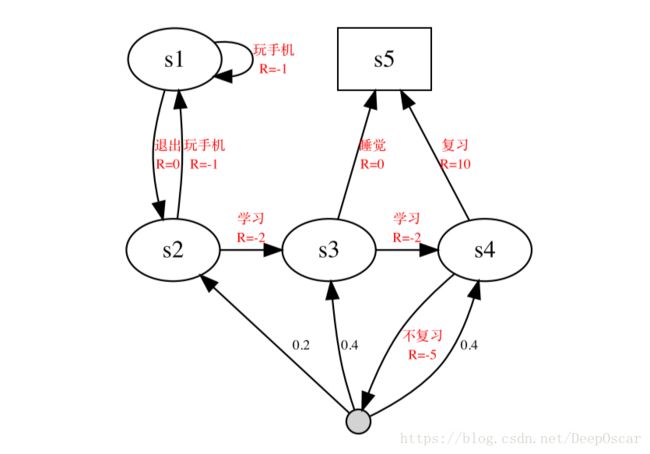
针对状态的奖励变成了针对 〈s, a〉 的奖励;能通过动作进行控制的状态转移,由原来的状态转移概率变成了动作;MDP只关注那些可以做出决策的动作;被动的状态转移关系被压缩成一个状态,被动指无论做任何动作,状态都会发生跳转。这样的状态不属于MDP中考虑的状态,原图中,由于通过后一定去睡觉因此进行了压缩,原图中挂科后的跳转不受到控制。
注,图中除了在“科目三”的状态上执行“不复习”动作外,其他的所有状态跳转都是确定性,我们通过在不同的状态上执行不同的动作,即可实现状态跳转。
能够随意愿改变的就变成了动作。我们关心的是在什么情况先该做什么动作。
14.策略
我们将之前MRPs中的状态转移矩阵分成了两个部分
- 能被智能体控制的策略,policy;
- MDPs中的转移矩阵P(不受智能体控制,认为是环境的一部分)。
定义:在MDPs中,一个策略π是在给定状态下的动作的概率分布,![]() 。
。
假设动作是有限的,我们就会写成一个向量,向量上的值对应相应动作的概率,该向量求和为1,不同的状态就会对应不同的向量值。当为确定性策略的时候,就不是一个分布问题了,就是a=π。
- 策略是对智能体行为的全部描述,若策略给定,所有动作将被确定。
- 在MDPs中的策略是基于马尔科夫状态的(而不是基于历史的)
- 策略是时间稳定的,只和s有关,与时间t无关。
- 策略是RL问题的终极目标
- 如果策略的概率分布输出的是独热的,那么称为确定性策略,否则为随机策略。
15.MDP和MRP之间的关系
对于一个MDP问题 〈S, A, P,R, γ〉,如果给定了策略π,
MDP将会退化成MRP,![]()
此时,![]() ,
,
策略π有两个含义,①当为确定性策略的时候,π就等于a表示一个动作;②当策略不确定的时候,就表示一个动作分布。
16.MDP中的值函数
在 MDPs 问题中,由于动作的引入,值函数分为了两种:①状态值函 数(V 函数);②状态动作值函数 (Q 函数)。
①状态值函 数(V 函数)定义:MDPs 中的状态值函数是从状态s开始,使用策略π得到的期望回报值。
![]() 。
。
②状态动作值函数 (Q 函数)定义:MDPs 中的状态动作值函数是从状态 s 开始,执行动作 a,然后使用策略 π 得到的期望回报值![]() 。
。
注:MDPs 中,任何不说明策略π 的情况下,讨论值函数都是在耍流氓!
和 MRP 相似,MDPs 中的值函数也能分解成瞬时奖励和后继状态的值 函数两部分:

举个例子说明问题:
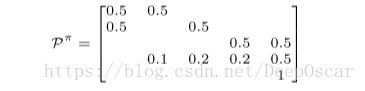
对于∀a, s 都有 π(a|s) = 0.5,且 γ = 1时,vπ(s)如下图所示:
将图中的圆圈状态从上到下从左到右分别记为 s1, s2, s3, s4,将终止状态记 为 s5,则当 π(a|s) = 0.5∀a, s 时,状态转移矩阵为:
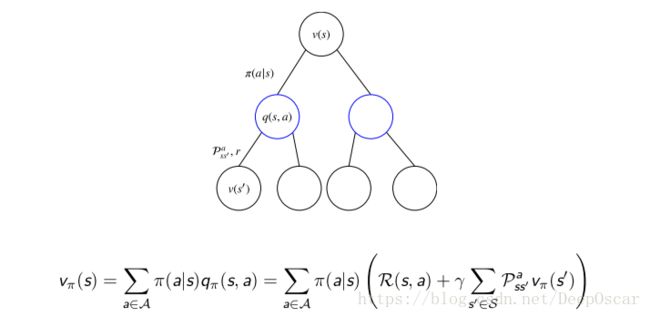
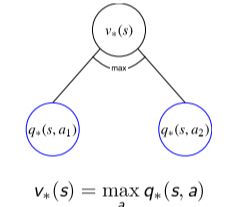
V 函数与 Q 函数之间的相互转化:
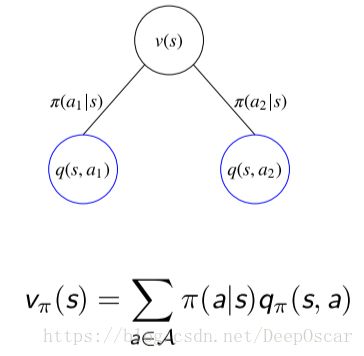
V-Q :
在状态s的情况下,有两个可行的动作,我们采用π分别取执行每一个动作的概率分别为π(a1 | s)和π(a2 | s)。
①执行a1动作的情况下,得到的动作状态值q(s, a 1);
①执行a2动作的情况下,得到的动作状态值q(s, a 2);
上图表示,上边圆圈的值可以通过下边圆圈的值求得。
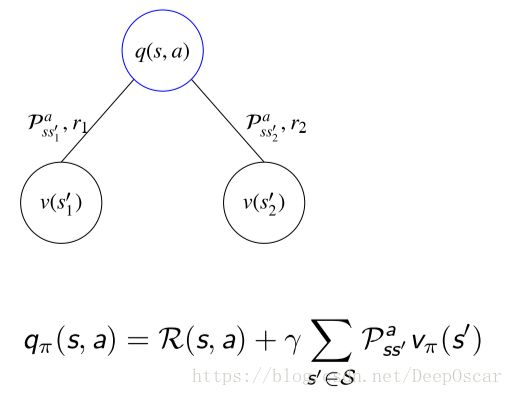
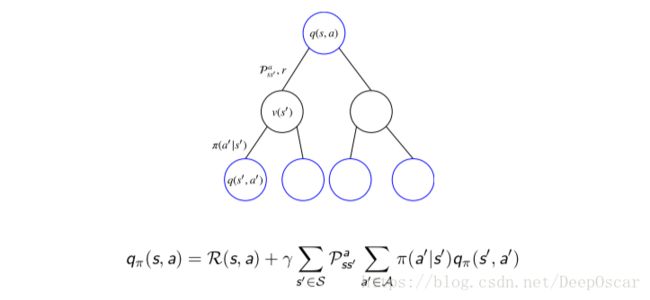
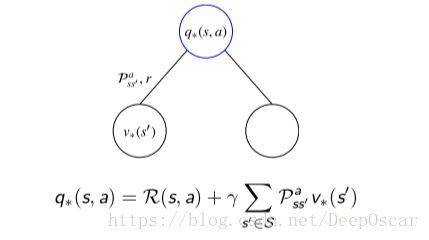
Q-V' :
而q是和下一状态的v是有关系的, q表示当前状态下做了一个动作a,做动作a后就会发生两个跳转,假设跳转也有两种可能分别为s1'和s2',中间会获得奖励r1和r2。花体的R代表了期望的意思。
17.贝尔曼期望方程V 函数和Q 函数
贝尔曼期望方程V 函数:
表达了MDP中的vπ(s)和vπ(s′)之间的关系。
实际上等价于![]() , 为什么?
, 为什么?
思考:
.... ...
贝尔曼期望方程Q函数:
实际上等价于![]() , 为什么?
, 为什么?
思考:
.... ...
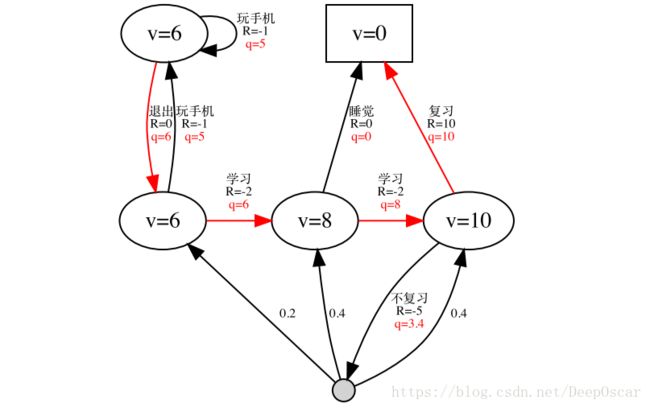
18.贝尔曼期望方程例子
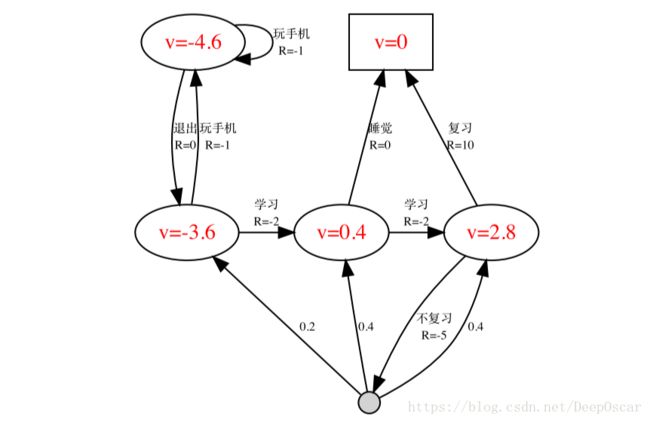
当γ=1,π(a|s) = 0.5时,
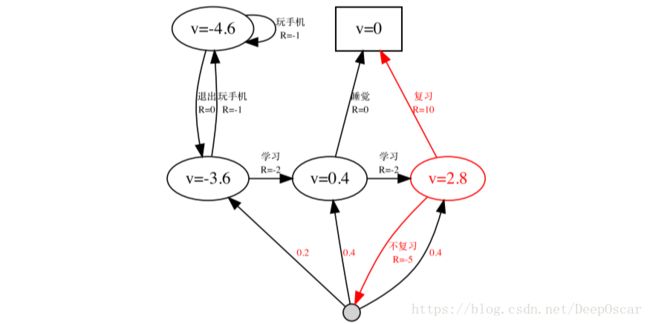


套用以上公式可以计算图中红圈之内的vπ(s)= 0.5 × (10 + 0) + 0.5 × (−5 + 0.2 ×−3.6 + 0.4 × 0.4 + 0.4 × 2.8)=2.8
19.贝尔曼期望方程的矩阵形式
MDPs 下的贝尔曼期望方程和 MRP 的形式相同,![]()
同样地,可以直接求解![]()
求解的要求:①已知 π(a|s);②已知![]()
20.最优值函数
之前值函数,以及贝尔曼期望方程针对的都是给定策略 π 的情况,是 一个评价的问题。
现在我们来考虑强化学习中的优化问题,即找出最好的策略。
定义:最优值函数指的是在所有策略中的值函数最大值,其中包括最优 V 函 数和最优 Q 函数:

最优值函数指的是一个 MDP 中所能达到的最佳性能;
如果我们找到最优值函数即相当于这个 MDP 已经解决了。
最优 V 函数和最优 Q 函数:
当 γ = 1 时的最优 V 函数 v∗(s); 当 γ = 1 时的最优 Q 函数 q∗(s, a);
21.最有策略
为了比较不同策略的好坏,我们首先定义策略的比较关系:
![]()
定理:
对于任何MDP问题,
- 总存在一个策略π*要好于或等于其他所有的策略,π∗ ≥ π, ∀π;
- 所有的最优策略都能够实现最优的 V 函数 vπ∗(s) = v∗(s)
- 所有的最优策略都能够实现最优的 Q 函数 qπ∗(s,a) = q∗(s,a)
怎么得到最优策略?
当我们已知了最优 Q 函数后,我们能够马上求出最优策略,只要根据 q∗(s, a) 选择相应的动作即可。

- 可以看出对于任何 MDPs 问题,总存在一个确定性的最优策略
如果已知最优 V 函数,能不能找到最优策略呢?
答:
思考
... ...
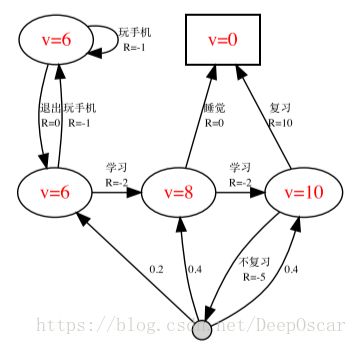
再次举个例子说明问题:
当 γ = 1 时的最优策略 π∗(a|s)
22.v∗ 与 q∗ 的相互转化
之前我们已经探讨了 vπ(s) 和 qπ(s, a) 之间的关系——贝尔曼期望方程,同样地,v∗(s) 和 q∗(s, a) 也存在递归的关系——贝尔曼最优方程。
和贝尔曼期望方程的关系:

贝尔曼最优方程——V 函数; 贝尔曼最优方程——Q 函数
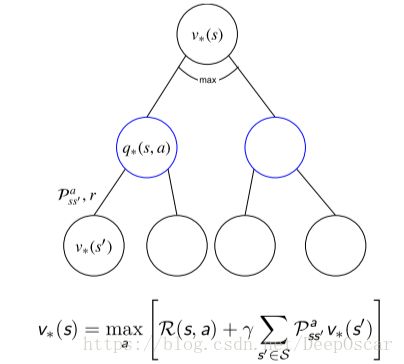
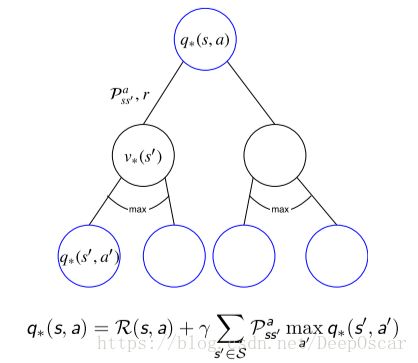
最优值函数和和贝尔曼期望方程的关系:
- 贝尔曼最优方程本质上就是利用了 π∗ 的特点,将求期望的算子转 化成了 MAXa
- 在贝尔曼期望方程中,π 是已知的。而在贝尔曼最优方程中,π∗ 是未知的
- 解贝尔曼期望方程的过程即对应了评价,解贝尔曼最优方程的过程即对应了优化
解贝尔曼最优方程:
- 贝尔曼最优方程不是线性的
- 一般很难有闭式的解
- 可以使用迭代优化的方法去解 :值迭代、策略迭代 、Q 学习、SARSA ...
23.MDPs 的拓展
无穷或连续 MDPs
- 动作空间或状态空间无限可数
- 动作空间或状态空间无限不可数 (连续)
- 时间连续
部分可观测 MDPs(Partially observable MDPs, POMDPs)
- 此时观测不等于状态 Ot ≠ St
- POMDPs 由七元组构成 < S, A, O, P,R, Z, γ >
- Z 是观测函数:

- 观测不满足马尔可夫性,因此也不满足贝尔曼方程
- 状态未知,隐马尔可夫过程
- 有时对于 POMDPs 来说,最优的策略是随机性的
无衰减 MDPs
- 用于各态历经马尔可夫决策过程 ,各态历经性:平稳随机过程的一种特性
- 存在独立于状态的平均奖赏

- 求值函数时,需要减去该平均奖赏,否则有可能奖赏爆炸
(结束,累炸了...)