Python-OpenCV(7)
接着上篇,这次主要讲一个主题就是:
图像的阈值处理
主要涵盖的内容点包括:
简单阈值
自适应阈值
Otsu’s 二值化
大家可能不是很清楚阈值处理的用途在什么地方,我举几个例子:
- 图像的二值化
- 区域的分割
- 图像的点/线/边缘检测
所以用途还是很广的,实则这块属于图像的分割范畴
ps: 有兴趣的可以看看数字图像处理的MATLAB实现这本书,讲的还是很不错的,代码使用MATLAB编写,推荐阅读
基础知识
对图像做阈值处理,基本的想法就是将图像分成前景和背景,通过选择一个阈值T,使得前景和背景分离,经过阈值处理之后的图像g(x,y)被定义为:
g(x,y)= a if f(x,y) > T
g(x,y)= b if f(x,y) <= T
标注为a的像素对应目标,标注为b的像素对应背景,假设此时我们令a=1,b=0,那么此时图像就只有两个值0,1了,图像显示出来就是只有黑(0),白(1) ,亦即二值化
简单阈值
这种方法非常简单,一但像素值高于阈值时,我们给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色)
cv2.threshhold(src, thresh, maxval, type[, dst])
参数:
- cv2.THRESH_BINARY:img(x,y)>threshold ,dst(x,y) = max_value; 否则,dst(x,y)=0
- cv2.THRESH_BINARY_INV:img(x,y)>threshold ,dst(x,y) = 0; 否则,dst(x,y)= max_value
- cv2.THRESH_TRUNC:img(x,y)>threshold,dst(x,y) = max_value; 否则dst(x,y) = src(x,y)
- cv2.THRESH_TOZERO:img(x,y)>threshold,dst(x,y) = src(x,y) ; 否则 dst(x,y) = 0
- cv2.THRESH_TOZERO_INV:img(x,y)>threshold,dst(x,y) = 0 ; 否则 dst(x,y) = src(x,y)
给个图帮助大家理解:
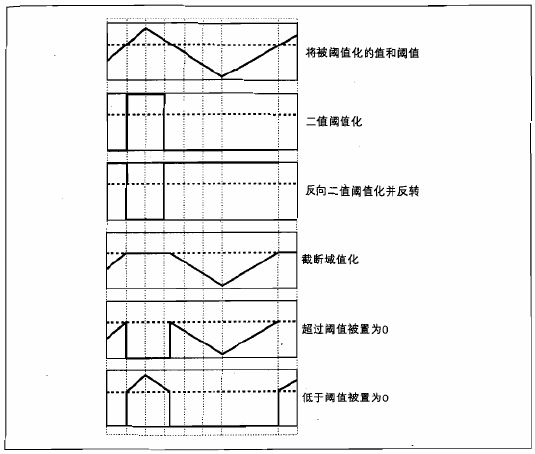
从上到下,分别对应上面的五个参数
代码:
__author__ = 'gavinzhou'
# -*- coding: utf-8 -*-
import cv2
import numpy as np
from matplotlib import pyplot as plt
# read the original images
img = cv2.imread("./images/1.png")
# convert to gray image
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# convert to binary image
ret, binary_img = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY)
cv2.imshow("ori", img)
cv2.imshow("binary1", binary_img)
cv2.waitKey(10000)
cv2.destroyAllWindows()结果:

自适应阈值
上面的阈值选择很简单,但是存在很大的问题:
我们使用是全局阈值,整幅图像采用同一个数作为阈值。这种方法并不适应于所有情况,尤其是当同一幅图像上的不同部分的具有不同亮度时
假如我们将上面的阈值从100调整到200,大家看看效果:

几乎什么都看不见了,是不是?所以咱们还需要个更加智能点的方法,我们希望这个方法可以:
- 采用自适应阈值
- 阈值是根据图像上的每一个小区域计算与其对应的阈值得到的
因此在同一幅图像上的不同区域采用的是不同的阈值,从而使我们能在亮度不同的情况下得到更好的结果,这个方法就是自适应阈值法
cv2.adaptiveThreshold(src, maxValue, adaptiveMethod, thresholdType, blockSize, C[, dst])
参数:
- cv2.ADPTIVE_THRESH_MEAN_C:阈值取自相邻区域的平均值
- cv2.ADPTIVE_THRESH_GAUSSIAN_C:阈值取值相邻区域的加权和,权重为一个高斯窗口
- Block Size:邻域大小(用来计算阈值的区域大小)
- C:阈值等于的平均值或者加权平均值减去这个常数
注意:
block_size参数决定局部阈值的block的大小,block很小时,如block_size=3 or 5 or 7时,表现为边缘提取函数。当把block_size设为比较大的值时,如block_size=21、51等,便是二值化
代码:
__author__ = 'gavinzhou'
# -*- coding: utf-8 -*-
import cv2
from matplotlib import pyplot as plt
# read the original images
img = cv2.imread("./images/1.png")
# convert to gray image
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# convert to binary image
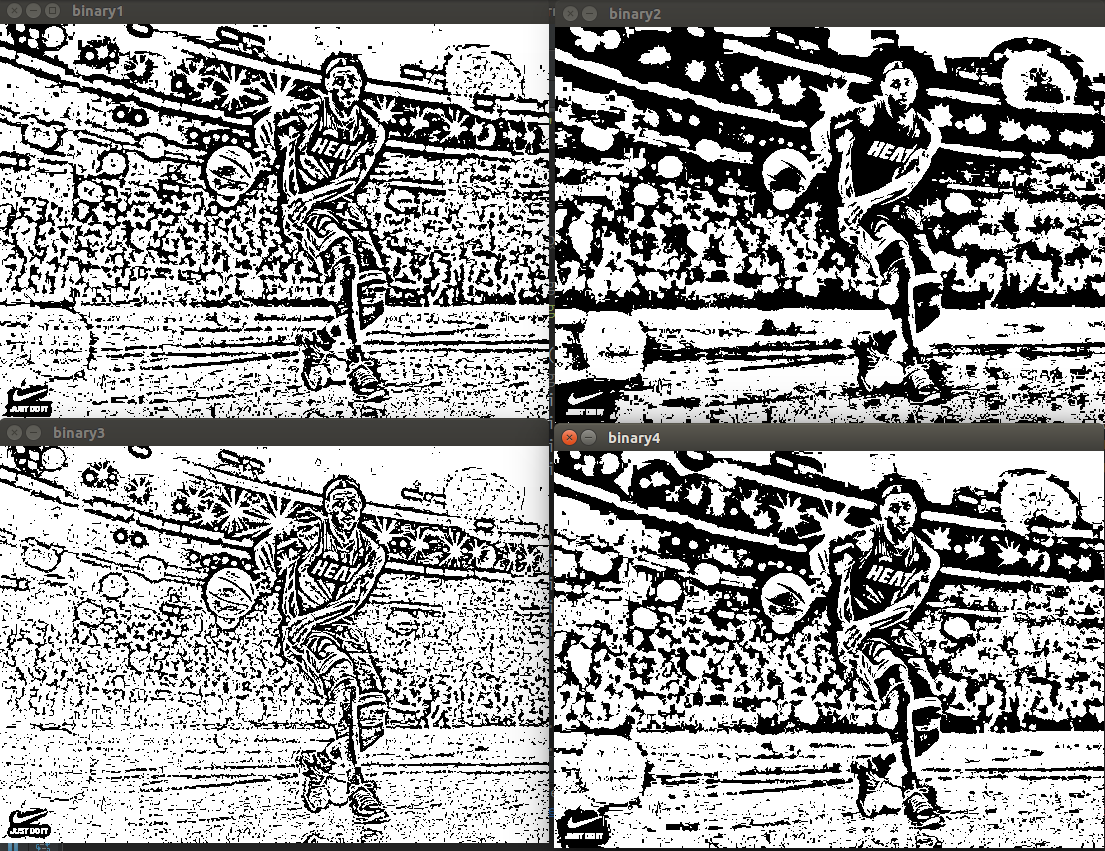
binary_img1 = cv2.adaptiveThreshold(gray_img, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
binary_img2 = cv2.adaptiveThreshold(gray_img, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 37, 2)
binary_img3 = cv2.adaptiveThreshold(gray_img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)
binary_img4 = cv2.adaptiveThreshold(gray_img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 37, 2)
cv2.imshow("binary1", binary_img1)
cv2.imshow("binary2", binary_img2)
cv2.imshow("binary3", binary_img3)
cv2.imshow("binary4", binary_img4)
cv2.waitKey(10000)
cv2.destroyAllWindows()结果:
Otsu’s Method
其实大家已经看到,上面的方法不好,对于全局阈值我们需要不停的去试,但是加入我们图像很多的话,我们就没法做了,因为我们不可能对每个图像都去试;
对于自适应阈值,其和局部的关系很大,参数也是要调节的,调节的不好,效果也很不行;
解决方法就是otsu's方法,数学原理很复杂,大家想知道的化,自己去搜下相关资料来看看,或者看看我上面推荐的那本数字图像处理的MATLAB实现,讲的很清楚,这里我们侧重实战,原理就不讲了哈!
cv2.threshold(src, 0, maxval, cv2.THRESH_OTSU+type[, dst])
就是将阈值设置为0,flag出加上cv2.THRESH_OTSU即可
代码:
__author__ = 'gavinzhou'
# -*- coding: utf-8 -*-
import cv2
from matplotlib import pyplot as plt
# read the original images
img = cv2.imread("./images/1.png")
# convert to gray image
gray_img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# convert to binary image
ret2, binary_img = cv2.threshold(gray_img, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU)
cv2.imshow("ori", img)
cv2.imshow("binary", binary_img)
print "Otsu's value is:", ret2
cv2.waitKey(10000)
cv2.destroyAllWindows()结果:
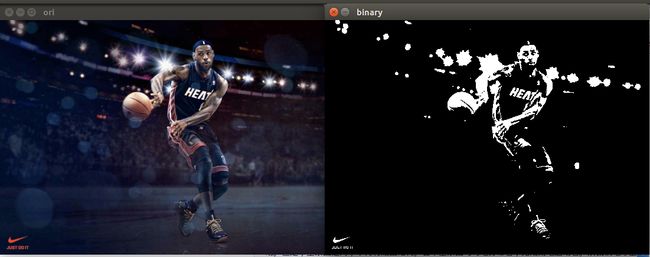
大家自己看吧,效果比上面的是不是好很多!
此时console打印的是:
Otsu’s value is: 88.0
otsu方法寻找到的阈值是88,自动寻找,省时省力,效果好