线性代数(21)——特征值和特征向量(下)
特征值和特征向量
- numpy中求取特征值和特征向量
- 矩阵的相似型(相似矩阵)
- 定义
- 注意P和P^(-1)的顺序
- 矩阵相似的本质
- 矩阵对角化
- 概念
- 实现矩阵对角化
- 矩阵对角化应用
numpy中求取特征值和特征向量
特征值和特征向量的求取不进行编程实现,因为整个求取过程中最重要的是求解 d e t ( A − λ I ) = 0 det(A-λI)=0 det(A−λI)=0 对应的 n n n次方程,其中 n n n是矩阵 A A A的阶数。
import numpy as np
from np.linalg import eig # eigen缩写
if __name__ == "__main__":
A1 = np.array([[4, -2], [1, 1]])
# eig方法两个返回值,分别是特征值和特征向量
eigen_values, eigen_vectors = eig(A1)
print(eigen_values) # [3.0, 2.0]
print(eigen_vectors) # [[0.8944..., 0.7071...], [0.4472..., 0.7071...]]
A2 = np.array([[0, 1], [1, 0]])
e_values, e_vectors = eig(A2)
print(e_values) # [1.0, -1.0]
print(e_vectors) # [[0.7071, -0.7071], [0.7071, 0.7071]]
# 复数特征值
A3 = np.array([[0, -1], [1, 0]])
e_values, e_vectors = eig(A3)
print(e_values) # [0.0+1.0j, 0.0-1.0j]
print(e_vectors) # [[0.7071 + 0j, 0.7071 - 0j], [0 - 0.7071j, 0 + 0.7071j]]
# 多重特征值
A4 = np.array([[1, 0], [0, 1]])
e_values, e_vectors = eig(A4)
print(e_values) # [1.0, 1.0]
print(e_vectors) # [[1, 0], [0, 1]]
A5 = np.array([[3, 1], [0, 3]])
e_values, e_vectors = eig(A5)
print(e_values) # [3.0, 3.0]
# [1, 0]和[-1, 0]实际上是线性相关(共线)的,这种结果产生是因为numpy本身内部的算法
print(e_vectors) # [[1, -1], [0, 0]]
矩阵的相似型(相似矩阵)
这一节是在为之后理解特征值和特征向量的具体用途进行铺垫。同时也是理解特征值和特征向量中“特征”一词在矩阵中具体的指代。
定义
如果矩阵 A A A和 B B B满足, A = P − 1 B P A = P^{-1}BP A=P−1BP 则称矩阵 A A A和 B B B相似。
理解这一概念可以类比相似三角形,回顾相似三角形,指的是三个内角相同,而三边的长度没有具体要求的两个三角形(即形状一样,大小不一样)。两个矩阵的相似和相似三角形一样,都是从不同的视角观察相同的内容, A = P − 1 B P A=P^{-1}BP A=P−1BP这个关系式中, P P P可以视为一个坐标系,则 A A A变换是在 P P P坐标系下观察的 B B B变换。对这句话进行讲解,
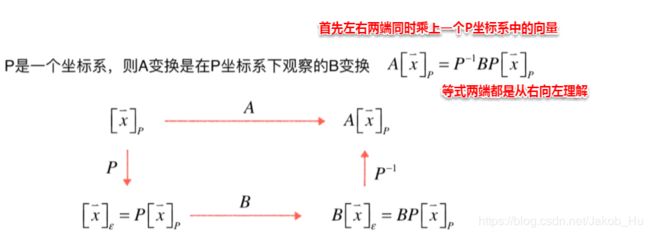
上面的这张图可以分解成两部分,分别是最上面的边和下面三条边构成的循环,
- 最上面的边
最上面的边表示的是 P P P坐标系中的向量 x ⃗ \vec{x} x经过矩阵 A A A变换得到的结果,该结果依旧是在 P P P坐标系中。 - 下方循环
首先将向量 x ⃗ \vec{x} x通过 P P P坐标系的坐标转换矩阵 P P P得到标准坐标系下对应的向量。
在标准坐标系下通过矩阵 B B B变换得到一个结果,该结果存在于标准坐标系下。
将上述标准坐标系中的向量通过 P − 1 P^{-1} P−1进行转换,得到其在 P P P坐标系中的向量。
依据 A = P − 1 B P A= P^{-1}BP A=P−1BP这个关系式,可知两个部分最终的结果是相同的,也可以理解为 A A A和 B B B这两个变换本质上是一个变换,只是两个变换过程所在的坐标系是不同的( A A A在 P P P坐标系下的变换与 B B B在标准坐标系下的变换是一样的)。这也是相似矩阵的几何含义。
注意P和P^(-1)的顺序
之前的公式 A = P − 1 B P A=P^{-1}BP A=P−1BP的另一个形式是 B = P A P − 1 B = PAP^{-1} B=PAP−1。通过前面的式子得到后面的这个式子是很简单的。需要注意的地方在于,
- 如果 P P P在前, P − 1 P^{-1} P−1在后,则 P P P和 P − 1 P^{-1} P−1之间夹着的变换是在 P P P坐标系下进行的。
- 如果 P − 1 P^{-1} P−1在前, P P P在后,则 P P P和 P − 1 P^{-1} P−1之外的变换是在 P P P坐标系下进行的。
这个规律是不需要背的,可以很容易的通过上面的两个式子理解(从右向左理解),
- A = P − 1 B P A=P^{-1}BP A=P−1BP
P P P在最后,说明第一步的转换将 P P P坐标系转换为标准坐标系,否则 P P P这一步没有几何意义,之后的 B B B转换是在标准坐标系中发生的。 - B = P A P − 1 B = PAP^{-1} B=PAP−1
P − 1 P^{-1} P−1在最后,说明第一步转换是在 P P P坐标系中进行的,否则 P − 1 P^{-1} P−1转换没有几何意义,之后的 A A A转换是在 P P P坐标系中发生的。
矩阵相似的本质
A A A和 B B B是相似矩阵,则两个矩阵具有相同的特征方程,相应的它们的特征值是相同的。
这也就是特征值的本意,无论是在哪个坐标系下观察, A A A和 B B B在不同的坐标系中的值并不相同,但是其特征方程和特征值是不变的。对上面的结论进行证明,

即证,当满足 A = P − 1 B P A = P^{-1}BP A=P−1BP的条件时, A A A和 B B B的特征方程是一样的,意味着 A A A和 B B B的特征值是相同的。
特征方程和特征值相同表达的是当把矩阵看做是变换时,这个变换无论从哪个坐标系看,这些变换都有相同的特征,这些特征通过特征值表征出来。
矩阵对角化
概念
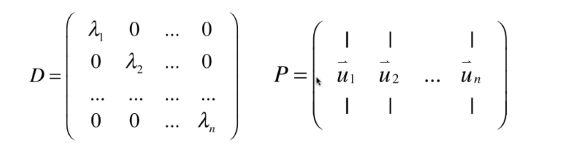
上面的结论证明出当矩阵看做是变换时,相似的矩阵在不同的坐标系下具有相同的特征。矩阵的对角化是尝试找出坐标系 P P P使得某一个矩阵 A A A所代表的变换能够在 P P P坐标系中表示为一个对角矩阵 D D D的变换,即 A = P D P − 1 A = PDP^{-1} A=PDP−1。对角矩阵的好处在于,它仅仅是对相同维度进行伸缩而不影响其他维度,这使得转换过程十分简单。

但是对角矩阵 D D D是不一定存在的,因为矩阵 A A A需要满足一定的条件,即如果 A A A有 n n n个线性无关的特征向量,则 A A A和某个对角矩阵 D D D相似,其中 n n n是矩阵 A A A的阶数。如果一个矩阵 A A A代表的转换能够在 P P P坐标系中表示为一个对角矩阵,则该对角矩阵的主对角线上的元素是矩阵 A A A的 n n n个特征值,而 P P P这个坐标系的坐标转换矩阵的每一列就是各特征值对应的特征向量。
这也就是要求 A A A矩阵满足上面的条件的原因,因为特征向量需要构成一组 n n n维空间的基。
对上述结论进行证明,

回顾之前的结论,如果矩阵 A A A含有两个不同的特征值,则他们对应的特征向量线性无关。对这一性质进行推广,当 A A A有 n n n个不同的特征值, n n n是矩阵 A A A的阶数,则 A A A可以被对角化。如果 A A A没有 n n n个不同的特征值, A A A不一定能被对角化,因为几何重数无法确定,只有在几何重数=代数重数,且对应的 n n n个特征向量线性无关时,矩阵 A A A才能够被对角化。
实现矩阵对角化
import numpy as np
from numpy import eig
from playLA.LinearSystem import rank
from playLA.Matrix import Matrix
def diagonalize(A):
# 判断A是矩阵且是方阵
assert A.ndim == 2
assert A.shape[0] == A.shape[1]
eigen_values, eigen_vectors = eig(A)
# 矩阵对角化的P对应的就是特征向量构成的坐标转换矩阵
P = eigen_vectos
# 通过矩阵的秩判断P是否可逆,不满秩则不可逆
if rank(Matrix(P.tolist())) != A.shape[0]:
print("Matrix can not be diagonalized")
return None, None, None
D = np.diag(eigen_values)
P_inv = np.inv(P)
return P, D, P_inv
if __name__ == "__main__":
# 能够对角化的情况
A1 = np.array([[4, -2], [1, 1]])
P1, D1, P_inv1 = diagonalize(A1)
print(P1) # [[0.8944, 0.7071]
# [0.4472, 0.7071]]
print(D1) # [[3.0, 0.0]
# [0.0, 2.0]]
print(P_inv1) # P的逆矩阵
print(P1.dot(D1).dot(P_inv1)) # 与A相同
# 无法对角化的情况
A2 = np.array([[3, 1], [0, 3]])
P2, D2, P_inv2 = diagonalize(A2) # 输出相应提示
矩阵对角化应用
A = P D P − 1 A= PDP^{-1} A=PDP−1, D D D变换是 P P P坐标系下观察到的 A A A变换。
矩阵对角化便于进行矩阵的幂运算。
具体的幂运算推导过程如下,

对于一个对角矩阵而言,其幂运算结果也是一个对角矩阵,且这个结论能够推广到 n n n次幂上,

这使得计算不需要进行矩阵转换,计算消耗减少很多。
特征值反映的是系统各个部分分量在不同时刻空间的变换速率。而且对角化后的运算都会简便很多,日常采集的大部分数据也都是能够被对角化的。