ros学习笔记
目录
1.如何直接添加源:
2.如何git clone 一个功能包后编译这个功能包
3.如何创建工作空间
4.如何创建功能包
5.ros工作空间介绍
6.创建了功能包,里面会包含一个CMakeLists.txt文件和package.xml
7.如何用.launch 同时运行多个节点
8.安装vim 应用
9.节点查看
-
1.如何直接添加源:
一般在运行一个功能空间时,要先输入source ~/catkin_ws/devel/setup.bash
打开新终端输入:
sudo gedit .bashrc
在最后面添加 source ~/catkin_ws/devel/setup.bash
就可直接运行
-
2.如何git clone 一个功能包后编译这个功能包
catkin_make --pkg rplidar_ros
3.如何创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws 进入到工作空间,cd 进入 cd ..退出
catkin_make编译工作空间
4.如何创建功能包
catkin_create_pkg 功能包名字 依赖项
catkin_create_pkg rplidar_ros roscpp std_msgs
5.ros工作空间介绍
src文件夹叫源文件空间:放置功能包、项目、克隆包等
build文件夹叫做编译空间,CMake和catkin为功能包和项目保存缓存信息和配置
devel 叫做开发空间,保存编译后的程序
6.创建了功能包,里面会包含一个CMakeLists.txt文件和package.xml
创建节点,打开新终端 ctrl+alt+T
cd ./catkin_ws/src/a_pkg 到达这个下
touch a.cpp 创建一个.cpp文件
节点名node_a
发布消息程序如下
#include "ros/ros.h" //包含了使用ROS节点的必要文件
#include "std_msgs/String.h" //包含了使用的数据类型
#include
int main(int argc, char **argv)
{
ros::init(argc, argv, "node_a"); //初始化ROS,节点名命名为node_a,节点名必须保持唯一
ros::NodeHandle n; //实例化节点, 节点进程句柄
ros::Publisher pub = n.advertise("str_message", 1000); //告诉系统要发布话题了,话题名为“str_message”,类型为std_msgs::String,缓冲队列为1000。
ros::Rate loop_rate(10); //设置发送数据的频率为10Hz
//ros::ok()返回false会停止运行,进程终止。
while(ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss<<"Hello World";
msg.data = ss.str();
ROS_INFO("node_a is publishing %s", msg.data.c_str());
pub.publish(msg); //向话题“str_message”发布消息
ros::spinOnce(); //不是必须,若程序中订阅话题则必须,否则回掉函数不起作用。
loop_rate.sleep(); //按前面设置的10Hz频率将程序挂起
}
return 0;
} 接受节点文件名b.cpp,节点名node_b
#include "ros/ros.h"
#include "std_msgs/String.h"
//话题回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("node_b is receiving [%s]", msg->data.c_str());
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "node_b"); //初始化ROS,节点命名为node_b,节点名必须唯一。
ros::NodeHandle n; //节点句柄实例化
ros::Subscriber sub = n.subscribe("str_message", 1000, chatterCallback); //向话题“str_message”订阅,一旦发布节点(node_a)在该话题上发布消息,本节点就会调用chatterCallbck函数。
ros::spin(); //程序进入循环,直到ros::ok()返回false,进程结束。
return 0;
}
编号程序,想要节点运行,还需在编写 CMakeLists,txt文件
add_executable(a src/node_a.cpp) #将node_a.cpp文件编译成可执行文件Test1_node_a
add_executable(b src/node_b.cpp)
add_dependencies(a ROS_Test1_generate_message_cpp) #添加可执行文件的消息依赖项
add_dependencies(b ROS_Test1_generate_message_cpp)
target_link_libraries(a ${catkin_LIBRARIES}) #为可执行文件Test_node_a添加链接库
target_link_libraries(b ${catkin_LIBRARIES})在终端中输入
catkin_make rplidar_ros(包名)
7.如何用.launch 同时运行多个节点
在功能包下创建一个专门放launch文件的包
cd ~/catkin_ws/src/rplidar_ros
mkdir launch
vim a.launch(若没有vim,使用命令 sudo apt-get install vim)
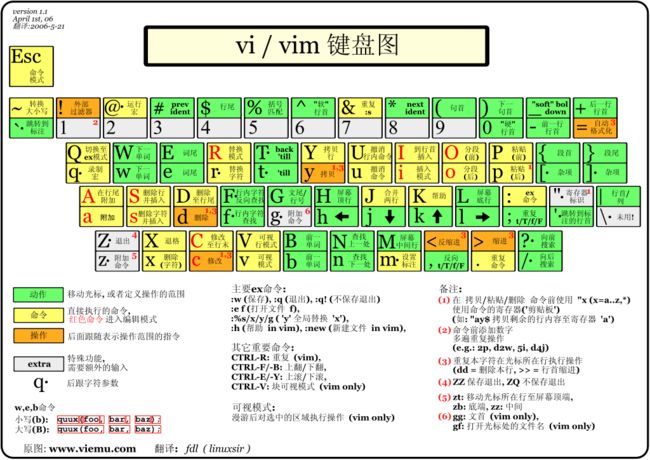
8.安装vim 应用
cd 到文件家目录
vim 文件名.launch
按i可以编辑
退出按esc,按
:w 保存
:q 退出
9.节点查看
rosnode list
rosrun rqt_graph rqt_graph下面所有关于moveit的报错,都是因为没有安装 Moveit造成的,
所以
sudo apt-get install ros-indigo-moveit-full
可以解决下面所有关于moveit的报错
1 , could not find a package configuration file provided by "moveit_core" with
-- sudo apt-get install ros-indigo-moveit-core
2 , Could not find a package configuration file provided by "control_toolbox"
-- sudo apt-get install ros-indigo-control-toolbox
3, Could not find a package configuration file provided by
"gazebo_ros_control" with any of the following names:
-- sudo apt-get install ros-indigo-gazebo-ros-control
总的来说就是缺少什么装什么
rosdep update , rosdep init 出问题时,基本都是公司的网络设置造成的。
参考:https://blog.csdn.net/David_Han008/article/details/53966532