强化学习DQN
DQN
针对Q-learning做出改进。原Q-learning的算法不能支持较大的Q表的查询和遍历,而DQN则直接将状态和动作当作神经网络的输入值,在分析后得到Q值;或者只输入状态值,输出动作值,从而根据Q-learning的原则进行动作的选择。
针对第二种进行分析,如何更新NN中的参数
- 两个让DQN能够更好的学习的方法
- Experience replay
随机抽取经历进行学习,从而打乱经历之间的相关性 - Fixed Q-targets
建立两个NN从而分别更新不同的参数,Q现实:R+ γ ∗ m a x Q ′ \gamma*maxQ' γ∗maxQ′使用的参数为很久以前的参数更新一个NN,而Q估计:Q使用的参数为最新的参数,从而实现相关性的切断
- Experience replay
- 代码中和Q-learning有区别地方为
# 将现在的观测环境,动作,奖励以及下一个环境进行储存 RL.store_transition(observation, action, reward, observation_) - 搭建两个神经网络,一个用作实时更新,另一个落后更新。隔一段时间再把实时更新的参数传递给落后更新的参数
# tensorflow r1.2版本 # ------------------ all inputs ------------------------ # 定义所有输入参数 self.s = tf.placeholder(tf.float32, [None, self.n_features], name='s') # input State self.s_ = tf.placeholder(tf.float32, [None, self.n_features], name='s_') # input Next State self.r = tf.placeholder(tf.float32, [None, ], name='r') # input Reward self.a = tf.placeholder(tf.int32, [None, ], name='a') # input Action w_initializer, b_initializer = tf.random_normal_initializer(0., 0.3), tf.constant_initializer(0.1) # ------------------ build evaluate_net ------------------ with tf.variable_scope('eval_net'): e1 = tf.layers.dense(self.s, 20, tf.nn.relu, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='e1') self.q_eval = tf.layers.dense(e1, self.n_actions, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='q') # ------------------ build target_net ------------------ # target_net需要和evaluate_net定义成一样的结构,只是需要时所传参数不同而已 with tf.variable_scope('target_net'): t1 = tf.layers.dense(self.s_, 20, tf.nn.relu, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='t1') self.q_next = tf.layers.dense(t1, self.n_actions, kernel_initializer=w_initializer, bias_initializer=b_initializer, name='t2') - memory存储管理
def store_transition(self, s, a, r, s_): # 如果不存在memory_counter属性,则将memory_counter置0 if not hasattr(self, 'memory_counter'): self.memory_counter = 0 # 存储数据一条状态数据 transition = np.hstack((s, [a, r], s_)) # replace the old memory with new memory # 先从上到下存储,满了之后从0开始覆盖 index = self.memory_counter % self.memory_size self.memory[index, :] = transition self.memory_counter += 1 - 根据概率选择action
- 为了阶段性地将训练的最新的参数更新到另一个target_net中,需要一个赋值操作
# 因为前期已经将参数添加到对应的collection中,所以直接get_collection就好 t_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='target_net') e_params = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES, scope='eval_net') with tf.variable_scope('hard_replacement'): self.target_replace_op = [tf.assign(t, e) for t, e in zip(t_params, e_params)] - 训练函数
# 摘抄自莫烦python================== def learn(self): # 检查是否替换 target_net 参数 if self.learn_step_counter % self.replace_target_iter == 0: self.sess.run(self.replace_target_op) print('\ntarget_params_replaced\n') # 从 memory 中随机抽取 batch_size 这么多记忆 if self.memory_counter > self.memory_size: sample_index = np.random.choice(self.memory_size, size=self.batch_size) else: sample_index = np.random.choice(self.memory_counter, size=self.batch_size) batch_memory = self.memory[sample_index, :] # 获取 q_next (target_net 产生了 q) 和 q_eval(eval_net 产生的 q) q_next, q_eval = self.sess.run( [self.q_next, self.q_eval], feed_dict={ self.s_: batch_memory[:, -self.n_features:], self.s: batch_memory[:, :self.n_features] }) # 下面这几步十分重要. q_next, q_eval 包含所有 action 的值, # 而我们需要的只是已经选择好的 action 的值, 其他的并不需要. # 所以我们将其他的 action 值全变成 0, 将用到的 action 误差值 反向传递回去, 作为更新凭据. # 这是我们最终要达到的样子, 比如 q_target - q_eval = [1, 0, 0] - [-1, 0, 0] = [2, 0, 0] # q_eval = [-1, 0, 0] 表示这一个记忆中有我选用过 action 0, 而 action 0 带来的 Q(s, a0) = -1, 所以其他的 Q(s, a1) = Q(s, a2) = 0. # q_target = [1, 0, 0] 表示这个记忆中的 r+gamma*maxQ(s_) = 1, 而且不管在 s_ 上我们取了哪个 action, # 我们都需要对应上 q_eval 中的 action 位置, 所以就将 1 放在了 action 0 的位置. # 下面也是为了达到上面说的目的, 不过为了更方面让程序运算, 达到目的的过程有点不同. # 是将 q_eval 全部赋值给 q_target, 这时 q_target-q_eval 全为 0, # 不过 我们再根据 batch_memory 当中的 action 这个 column 来给 q_target 中的对应的 memory-action 位置来修改赋值. # 使新的赋值为 reward + gamma * maxQ(s_), 这样 q_target-q_eval 就可以变成我们所需的样子. # 具体在下面还有一个举例说明. q_target = q_eval.copy() batch_index = np.arange(self.batch_size, dtype=np.int32) eval_act_index = batch_memory[:, self.n_features].astype(int) reward = batch_memory[:, self.n_features + 1] q_target[batch_index, eval_act_index] = reward + self.gamma * np.max(q_next, axis=1) """ 假如在这个 batch 中, 我们有2个提取的记忆, 根据每个记忆可以生产3个 action 的值: q_eval = [[1, 2, 3], [4, 5, 6]] q_target = q_eval = [[1, 2, 3], [4, 5, 6]] 然后根据 memory 当中的具体 action 位置来修改 q_target 对应 action 上的值: 比如在: 记忆 0 的 q_target 计算值是 -1, 而且我用了 action 0; 记忆 1 的 q_target 计算值是 -2, 而且我用了 action 2: q_target = [[-1, 2, 3], [4, 5, -2]] 所以 (q_target - q_eval) 就变成了: [[(-1)-(1), 0, 0], [0, 0, (-2)-(6)]] 最后我们将这个 (q_target - q_eval) 当成误差, 反向传递会神经网络. 所有为 0 的 action 值是当时没有选择的 action, 之前有选择的 action 才有不为0的值. 我们只反向传递之前选择的 action 的值, """
DoubleDQN

对比DQN中的公式Q现实:![]()
Q m a x Q_{max} Qmax是selected_q_next = np.max(q_next, axis=1) # the natural DQN而这其中的q_next是从target_net中得到的,而这个值会有误差,所以将误差也同时做了最大化,从而导致了overestimate
针对DoubleDQN![]()
想法是引入另一个神经网络来消除一些误差影响,而DQN本身就有两个神经网络,所以可以利用其中的evaluate_net来估计q_next中的最大动作值
max_act4next = np.argmax(q_eval4next, axis=1) # the action that brings the highest value is evaluated by q_eval
selected_q_next = q_next[batch_index, max_act4next] # Double DQN, select q_next depending on above actions
其中的q_eval4next从evaluate_net中得到,用于从q_next中做估计,而q_next从target_net中得到的
最后将这个selected_q_next传给了q_target[batch_index, eval_act_index] = reward + self.gamma * selected_q_next
Prioritized Experience Replay (DQN)
在随机提取记忆的时候,按照重要程度进行抽样
考察重要程度的标准为TD-error,如果TD-error越大,则表示误差越大,越需要学习,而这个值是由Q现实-Q估计得来的。那么怎么从这个值得到优先级呢,就涉及到一个算法SumTree,参考link
while True: # the while loop is faster than the method in the reference code
cl_idx = 2 * parent_idx + 1 # this leaf's left and right kids
cr_idx = cl_idx + 1
if cl_idx >= len(self.tree): # reach bottom, end search
leaf_idx = parent_idx
break
else: # downward search, always search for a higher priority node
if v <= self.tree[cl_idx]:
parent_idx = cl_idx
else:
v -= self.tree[cl_idx]
parent_idx = cr_idx
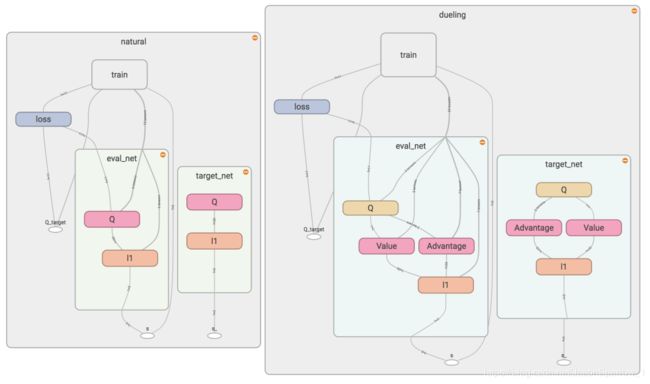
Dueling DQN
相比标准的DQN,Dueling DQN对网络结构做出了调整,将原来的输出Q值的网络做了拆分和合并

根据公式,将Q值分解为state值和每个action对state产生影响的advantage,并不是每个动作都会对state产生很大影响的
![]()
在tensorboard中看到的内容如下
代码部分只对build_net部分做了修改:
# Dueling DQN
with tf.variable_scope('Value'):
w2 = tf.get_variable('w2', [n_l1, 1], initializer=w_initializer, collections=c_names)
b2 = tf.get_variable('b2', [1, 1], initializer=b_initializer, collections=c_names)
self.V = tf.matmul(l1, w2) + b2
with tf.variable_scope('Advantage'):
w2 = tf.get_variable('w2', [n_l1, self.n_actions], initializer=w_initializer, collections=c_names)
b2 = tf.get_variable('b2', [1, self.n_actions], initializer=b_initializer, collections=c_names)
self.A = tf.matmul(l1, w2) + b2
with tf.variable_scope('Q'):
out = self.V + (self.A - tf.reduce_mean(self.A, axis=1, keep_dims=True))
# Q = V(s) + A(s,a)