【算法】图论(一) —— 基本图算法(BFS/DFS/强连通分量)
基本图算法
一、图的表示
对于图G=(V,E),可以用两种表示方法表示,一种将图表示为邻接链表,另一种将图表示为邻接矩阵。这两种方法都既可以表示无向图,又可以表示有向图。
1. 邻接链表
邻接链表适用于稀疏图(边的条数 |E| 远小于 |V|2 的图)。邻接链表由一个包含|V|条链表的数组Adj构成,每个节点有一条链表。若G是无向图,则Adj[u]包含所有与u邻接的节点,所有邻接链表之和为2|E|;若G是有向图,则Adj[u]包含节点u所指向的所有节点,所有邻接链表之和为|E|。无论是有向图还是无向图,邻接链表表示法的存储空间需求为 Θ(V+E) 。邻接链表的一个潜在缺陷是无法快速判断一条边(u,v)是否在图中,唯一的方法是在邻接链表Adj[u]里搜索节点v。我们可以通过用散列表来替代链表加快边的搜索,但是缺陷是散列表的大小及散列函数难以确定,而且这种方法只在每条边的查询频率相同时效率最大。邻接矩阵也克服了这个缺陷,但需要更大的存储空间消耗。
2. 邻接矩阵
邻接矩阵对图G中的节点任意编号1,2,…,|V|,在编号后,用一个 |V|×|V| 的矩阵 A=(aij) 予以表示,该矩阵满足下述条件:
使用邻接矩阵表示一个图,无论图中边的数量为多少,其所需存储空间均为 Θ(V2) 。对于无向图,其邻接矩阵为一个对称矩阵,所以在某些应用中只需要存储对角线及其以上这部分邻接矩阵即可,从而将邻接矩阵的存储空间需求减少几乎一半。
3. 两种表示方法的比较
邻接矩阵表示比较简单,所以在图规模比较小的时候,可能更倾向于使用邻接矩阵表示,而且对于无向图来说,邻接矩阵的一个优势是每个记录项只需要一位空间。
二、广度优先搜索(BFS)
通常用于寻找特定源节点出发的最短路径距离,所以图通常为连通图。
广度优先搜索是最简单的图算法之一,是许多图算法模型的原型(Prim/Dijkstra等)。给定图G=(V,E)和一个可以识别的源节点s,广度优先搜索对图G中的边进行系统性的探索来发现可以从源节点s到达的所有节点。该算法能够计算从源节点s到每个可到达节点的距离(最少的边数),同时生成一棵“广度优先搜索树”。该树以源节点s为根节点,包含所有可以从s到达的节点。对于每个从源节点s可以到达的节点v,在广度优先搜索树里从节点s到节点v的简单路径所对应的就是图G中从节点s到节点v的“最短路径”,即包含最少边数的路径。该算法对有向图和无向图同样适用。
在执行广度优先搜索的过程中将构造出一棵广度优先树。一开始该树只有根节点,即源节点s。在扫描已发现节点u的邻接链表时,每当发现一个未被发现的节点v,就将节点v和边(u,v)同时加入该树。以下为算法导论中的BFS伪代码,代码中为每个节点设置一个color属性,白色节点为未被发现节点,黑色节点和灰色节点均为发现节点,区别在于黑色节点的所有邻居节点都已经被发现,而灰色节点存在部分白色邻居节点。
BFS(G,s)
// 初始化图中除源节点s外的所有节点属性
for each vertex u in G.V-{s}
u.color = WHITE // 未被发现
u.d = INF // 与源节点的距离为无限大
u.pi = NIL // 前驱节点/父节点为空
// 初始源节点s属性
s.color = GRAY
s.d = 0
s.pi = NIL
Q = empty set // 初始化灰色节点集
ENQUEUE(Q, s)
while Q is NOT an empty set
u = DEQUEUE(Q)
for each v in G.Adj[u]
if v.color == WHILE
v.color = GRAY
v.d = u.d+1
v.pi = u
ENQUEUE(Q, v)
u.color = BLACK 算法复杂度分析:
每个节点的入队操作和出队操作最多均为1次,入队和出队的时间均为O(1),因此对队列操作的总时间为O(V)。因为算法只在一个节点出队时才对该节点的邻接链表进行扫描,所以每个邻接链表最多只扫描一次。由于所有邻接链表的长度之和为 Θ(E) ,用于扫描邻接链表的总时间为O(E)。初始化操作的成本为O(V),因此广度优先搜索的总时间为O(V+E),即广度优先搜索的运行时间是图G的邻接链表大小的一个线性函数。
三、深度优先搜索(DFS)
通常作为另一个算法中的子程序,所以也常常用于不是连通图的图中。
深度优先搜索总是探索最近发现节点的子节点,知道探索到不存在子节点的节点v,则“回溯”到v的父节点,该过程一直持续到从源节点可以到达的所有节点都被发现为止。若还存在未发现节点,则从未发现节点任选一个作为新的源节点,重复同样过程,直到所有节点都被发现。
类似广度优先搜索算法,深度优先搜索在算法导论中同样使用颜色属性来指明节点状态,初始为白色,节点被发现为灰色,节点的邻接链表被扫描完成为黑色。同时,深搜中每个节点有两个时间戳:第一个时间戳v.d记录节点v第一次被发现的时间(涂上灰色的时候);第二个时间戳v.f记录搜索完成对v的邻接链表扫描时间(涂上黑色的时候)。时间戳提供了图结构的重要信息,通常能够帮助推断深度优先搜索算法的行为。以下伪代码给出基本的深度优先算法。
DFS(G)
for each vertex u in G.V
u.color = WHITE
u.pi = NIL
time = 0 // 全局变量,用于计算时间戳
for each vertex u in G.V
if u.color == WHITE
DFS-VISIT(G, u)
DFS-VISIT(G, u)
time = time+1 //白色节点u刚刚被发现
u.d = time
u.color = GRAY
for each v in G.Adj[u] // 探索边(u,v)
if v.color = WHITE
v.pi = u
DFS-VISIT(G, v)
u.color = BLACK
time = time+1
u.f = time算法复杂度分析:
对于DFS(G)函数,排除对DFS-VISIT(G,u)的调用,其所需时间为 Θ(V) 。对于每一个节点 v∈V ,DFS-VISIT函数的调用次数为一次(当且仅当该节点为白色时,DFS-VISIT中将调用该函数的白色节点涂成灰色)。DFS-VISIT函数中遍历节点的邻接链表,对于所有节点来说,其操作成本为 Θ(E) ,因此深搜的运行时间为 Θ(V+E) 。
深搜中,节点的发现时间和完成时间具有括号化结构(parenthesis structure),则发现时间和完成时间的历史记载形成规整的表达式,即所有括号都是正确的嵌套在一起,通过节点的两个时间戳,可以确定两个节点之间的关系(后代关系)。
四、强连通分量
强连通分量:对于有向图G=(V,E),强连通分量是一个最大节点集合 C⊆V ,对于该集合中的任一节点对u和v,路径u->v和路径v->u同时存在,即节点u和节点v可以互相到达。
强连通分量是深度优先搜索的一个经典应用,许多针对有向图的算法都以此种分解操作开始。
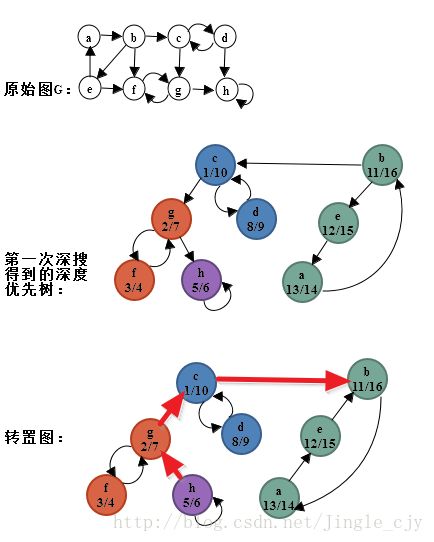
寻找强连通分量需要对图G=(V,E)进行转置得到 GT=(V,ET) ,其中 ET={(u,v):(v,u)∈E} ,也就是对图G中的所有边进行反向得到。给定图G的邻接链表,得到其转置所需的时间为O(V+E)。可以看出图 G 和图 GT 中的强连通分量完全相同。算法导论中给出一个线性时间( Θ(V+E) 时间)算法,通过两次深搜来计算有向图中的强连通分量。
STRONGLY-CONNECTED-COMPONENTS(G)
call DFS(G) t compute finishing time u.f for each vertex u
compute G^T
call DFS(G^T), but in the main loop of DFS, consider the vertices in order of decreasing u.f (as computed above)
output the vertices of each tree in the depth-first forest formed as a separate strongly connected component该算法能够正确工作的关键在于:在转置图 GT 中,连接不同强连通分量的每条边都是从完成时间较早(第一次深搜所计算的完成时间)的分量指向完成时间较迟的分量,如下图所示,第一次深搜会构建一棵深度优先树,每个节点中记录该节点的发现时间/完成时间:
参考代码
[1] 广度优先搜索算法/深度优先搜索算法/强连通分量算法