Sarsa
1、算法:
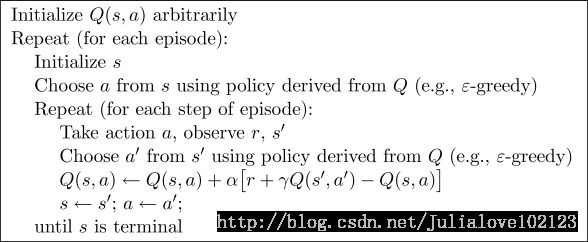
整个算法还是一直不断更新 Q table 里的值, 然后再根据新的值来判断要在某个 state 采取怎样的 action. 不过于 Qlearning 不同之处:
Sarsa在当前 state 已经想好了 state 对应的 action, 而且想好了 下一个 state_ 和下一个 action_ (Qlearning 还没有想好下一个 action_)
更新 Q(s,a) 的时候基于的是下一个 Q(s_, a_) (Qlearning 是基于 maxQ(s_)),这种不同之处使得 Sarsa 相对于 Qlearning, 更加的胆小. 因为 Qlearning 永远都是想着 maxQ 最大化, 因为这个 maxQ 而变得贪婪, 不考虑其他非 maxQ 的结果. 我们可以理解成 Qlearning 是一种贪婪, 大胆, 勇敢的算法. 而 Sarsa 是一种保守的算法, 他在乎每一步决策, 对于错误和死亡比较铭感. 这一点我们会在可视化的部分看出他们的不同. 两种算法都有他们的好处, 比如在实际中, 你比较在乎机器的损害, 用一种保守的算法, 在训练时就能减少损坏的次数.
2、代码实现:
maze_env: 环境模块,;
RL_brain:RL 的大脑部分
from maze_env import Maze
from RL_brain import SarsaTable2.1、迭代部分:
def update():
for episode in range(100):
# 初始化环境
observation = env.reset()
# Sarsa 根据 state 观测选择行为
action = RL.choose_action(str(observation))
while True:
# 刷新环境
env.render()
# 在环境中采取行为, 获得下一个 state_ (obervation_), reward, 和是否终止
observation_, reward, done = env.step(action)
# 根据下一个 state (obervation_) 选取下一个 action_
action_ = RL.choose_action(str(observation_))
# 从 (s, a, r, s, a) 中学习, 更新 Q_tabel 的参数 ==> Sarsa
RL.learn(str(observation), action, reward, str(observation_), action_)
# 将下一个当成下一步的 state (observation) and action
observation = observation_
action = action_
# 终止时跳出循环
if done:
break
# 大循环完毕
print('game over')
env.destroy()
if __name__ == "__main__":
env = Maze()
RL = SarsaTable(actions=list(range(env.n_actions)))
env.after(100, update)
env.mainloop()2.2、主结构(1):
class SarsaTable:
# 初始化 (与之前一样)
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
# 选行为 (与之前一样)
def choose_action(self, observation):
# 学习更新参数 (有改变)
def learn(self, s, a, r, s_):
# 检测 state 是否存在 (与之前一样)
def check_state_exist(self, state):主结构(2):继承的思想:
2.2.1、父类:
import numpy as np
import pandas as pd
class RL(object):
def __init__(self, action_space, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
... # 和 QLearningTable 中的代码一样
def check_state_exist(self, state):
... # 和 QLearningTable 中的代码一样
def choose_action(self, observation):
... # 和 QLearningTable 中的代码一样
def learn(self, *args):
pass # 每种的都有点不同, 所以用 pass2.2.2、Q-Learning子类:
class QLearningTable(RL): # 继承了父类 RL
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(QLearningTable, self).__init__(actions, learning_rate, reward_decay, e_greedy) # 表示继承关系
def learn(self, s, a, r, s_): # learn 的方法在每种类型中有不一样, 需重新定义
self.check_state_exist(s_)
q_predict = self.q_table.ix[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.ix[s_, :].max()
else:
q_target = r
self.q_table.ix[s, a] += self.lr * (q_target - q_predict)2.2.3、Sarsa子类:
class SarsaTable(RL): # 继承 RL class
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(SarsaTable, self).__init__(actions, learning_rate, reward_decay, e_greedy) # 表示继承关系
def learn(self, s, a, r, s_, a_):
self.check_state_exist(s_)
q_predict = self.q_table.ix[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.ix[s_, a_] # q_target 基于选好的 a_ 而不是 Q(s_) 的最大值
else:
q_target = r # 如果 s_ 是终止符
self.q_table.ix[s, a] += self.lr * (q_target - q_predict) # 更新 q_table2.3、环境:
import numpy as np
np.random.seed(1)
import tkinter as tk
import time
UNIT = 40 # pixels
MAZE_H = 4 # grid height
MAZE_W = 4 # grid width
class Maze(tk.Tk):
def __init__(self):
super(Maze, self).__init__()
self.action_space = ['u', 'd', 'l', 'r']
self.n_actions = len(self.action_space)
self.title('maze')
self.geometry('{0}x{1}'.format(MAZE_H * UNIT, MAZE_H * UNIT))
self._build_maze()
def _build_maze(self):
self.canvas = tk.Canvas(self, bg='white',
height=MAZE_H * UNIT,
width=MAZE_W * UNIT)
# create grids
for c in range(0, MAZE_W * UNIT, UNIT):
x0, y0, x1, y1 = c, 0, c, MAZE_H * UNIT
self.canvas.create_line(x0, y0, x1, y1)
for r in range(0, MAZE_H * UNIT, UNIT):
x0, y0, x1, y1 = 0, r, MAZE_H * UNIT, r
self.canvas.create_line(x0, y0, x1, y1)
# create origin
origin = np.array([20, 20])
# hell
hell1_center = origin + np.array([UNIT * 2, UNIT])
self.hell1 = self.canvas.create_rectangle(
hell1_center[0] - 15, hell1_center[1] - 15,
hell1_center[0] + 15, hell1_center[1] + 15,
fill='black')
# hell
hell2_center = origin + np.array([UNIT, UNIT * 2])
self.hell2 = self.canvas.create_rectangle(
hell2_center[0] - 15, hell2_center[1] - 15,
hell2_center[0] + 15, hell2_center[1] + 15,
fill='black')
# create oval
oval_center = origin + UNIT * 2
self.oval = self.canvas.create_oval(
oval_center[0] - 15, oval_center[1] - 15,
oval_center[0] + 15, oval_center[1] + 15,
fill='yellow')
# create red rect
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# pack all
self.canvas.pack()
def reset(self):
self.update()
time.sleep(0.5)
self.canvas.delete(self.rect)
origin = np.array([20, 20])
self.rect = self.canvas.create_rectangle(
origin[0] - 15, origin[1] - 15,
origin[0] + 15, origin[1] + 15,
fill='red')
# return observation
return self.canvas.coords(self.rect)
def step(self, action):
s = self.canvas.coords(self.rect)
base_action = np.array([0, 0])
if action == 0: # up
if s[1] > UNIT:
base_action[1] -= UNIT
elif action == 1: # down
if s[1] < (MAZE_H - 1) * UNIT:
base_action[1] += UNIT
elif action == 2: # right
if s[0] < (MAZE_W - 1) * UNIT:
base_action[0] += UNIT
elif action == 3: # left
if s[0] > UNIT:
base_action[0] -= UNIT
self.canvas.move(self.rect, base_action[0], base_action[1]) # move agent
s_ = self.canvas.coords(self.rect) # next state
# reward function
if s_ == self.canvas.coords(self.oval):
reward = 1
done = True
elif s_ in [self.canvas.coords(self.hell1), self.canvas.coords(self.hell2)]:
reward = -1
done = True
else:
reward = 0
done = False
return s_, reward, done
def render(self):
time.sleep(0.1)
self.update()2.4、具体实现:
import numpy as np
import pandas as pd
class RL(object):
def __init__(self, action_space, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
self.actions = action_space # a list
self.lr = learning_rate
self.gamma = reward_decay
self.epsilon = e_greedy
self.q_table = pd.DataFrame(columns=self.actions)
def check_state_exist(self, state):
if state not in self.q_table.index:
# append new state to q table
self.q_table = self.q_table.append(
pd.Series(
[0]*len(self.actions),
index=self.q_table.columns,
name=state,
)
)
def choose_action(self, observation):
self.check_state_exist(observation)
# action selection
if np.random.rand() < self.epsilon:
# choose best action
state_action = self.q_table.ix[observation, :]
state_action = state_action.reindex(np.random.permutation(state_action.index)) # some actions have same value
action = state_action.argmax()
else:
# choose random action
action = np.random.choice(self.actions)
return action
def learn(self, *args):
pass
# off-policy
class QLearningTable(RL):
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(QLearningTable, self).__init__(actions, learning_rate, reward_decay, e_greedy)
def learn(self, s, a, r, s_):
self.check_state_exist(s_)
q_predict = self.q_table.ix[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.ix[s_, :].max() # next state is not terminal
else:
q_target = r # next state is terminal
self.q_table.ix[s, a] += self.lr * (q_target - q_predict) # update
# on-policy
class SarsaTable(RL):
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
super(SarsaTable, self).__init__(actions, learning_rate, reward_decay, e_greedy)
def learn(self, s, a, r, s_, a_):
self.check_state_exist(s_)
q_predict = self.q_table.ix[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.ix[s_, a_] # next state is not terminal
else:
q_target = r # next state is terminal
self.q_table.ix[s, a] += self.lr * (q_target - q_predict) # update