OpenCV4.0进阶(6)高斯双边模糊
知识点:
边缘保留滤波算法 – 高斯双边模糊:
之前我们介绍了图像卷积处理无论是均值还是高斯都是属于模糊卷积,它们都有一个共同的特点就是模糊之后图像的边缘信息不复存在,受到了破坏。我们今天介绍的滤波方法有能力通过卷积处理实现图像模糊的同时对图像边缘不会造成破坏,滤波之后的输出完整的保存了图像整体边缘(轮廓)信息,这类卷积滤波算法被称为边缘保留滤波算法(EPF)。
最常见的边缘保留滤波算法有以下几种:
- 高斯双边模糊;
- Meanshift均值迁移模糊;
- 局部均方差模糊。
今天主要介绍高斯双边模糊算法。
高斯双边模糊:
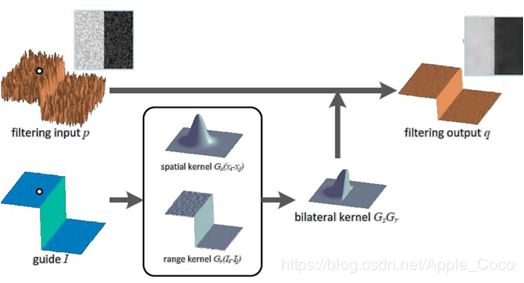
高斯模糊是考虑图像空间位置对权重的影响,但是它没有考虑图像像素分布对图像卷积输出的影响,双边模糊考虑了像素值分布的影响,对像素值空间分布差异较大的进行保留从而完整的保留了图像的边缘信息。
相关API:
void bilateralFilter( InputArray src, OutputArray dst, int d,
double sigmaColor, double sigmaSpace,
int borderType = BORDER_DEFAULT );- src:Source 8-bit or floating-point, 1-channel or 3-channel image;
- dst:Destination image of the same size and type as src;
- d:用于滤波的每个像素邻域的直径。如果它是非正数,则从sigmaSpace计算;
- sigmaColor:在颜色空间中过滤。较大的参数值意味着像素邻域内的较远颜色(参见sigmaSpace)将混合在一起,从而产生较大的半等色区域;
- sigmaSpace:在坐标空间中过滤。参数值越大,表示距离越远的像素只要颜色足够接近就会相互影响(参见sigmaColor)。当d > 0时,它指定了与sigmaSpace无关的邻域大小。否则,d与sigmaSpace成正比;
- borderType:用于推断图像外部像素的边界模式,请参见#BorderTypes。
代码演示:
#ifndef DAY26
#define DAY26
#include
#include
using namespace std;
using namespace cv;
void gaussian_noise(Mat &image);
void day26() {
Mat src = Mat::zeros(Size(400, 400), CV_8UC3);
src(Rect(0, 0, 200, 200)).setTo(Scalar(64, 64, 64));
src(Rect(200, 0, 200, 200)).setTo(Scalar(128, 128, 128));
src(Rect(0, 200, 200, 200)).setTo(Scalar(192, 192, 192));
src(Rect(200, 200, 200, 200)).setTo(Scalar(255, 255, 255));
namedWindow("src", WINDOW_AUTOSIZE);
imshow("src", src);
Mat result1, result2;
bilateralFilter(src, result1, 0, 100, 5, 4);
imshow("高斯双边模糊", result1);
GaussianBlur(src, result2, Size(5, 5), 15, 0, 4);
imshow("高斯模糊", result2);
src = imread("G:/opencvTest/girl.jpg");
if (src.empty()) {
printf("could not load image...\n");
return;
}
imshow("imput", src);
gaussian_noise(src);
bilateralFilter(src, result1, 0, 100, 5, 4);
imshow("高斯双边模糊 人物照", result1);
GaussianBlur(src, result2, Size(5, 5), 15, 0, 4);
imshow("高斯模糊 人物照", result2);
waitKey();
}
void gaussian_noise(Mat &image) {
Mat noise = Mat::zeros(image.size(), image.type());
// 通过randn产生高斯随机噪声来填充矩阵,15是高斯均值,30是高斯方差
randn(noise, 15, 30);
Mat dst;
add(image, noise, dst);
imshow("gaussian noise", dst);
dst.copyTo(image);
}
#endif // !DAY26
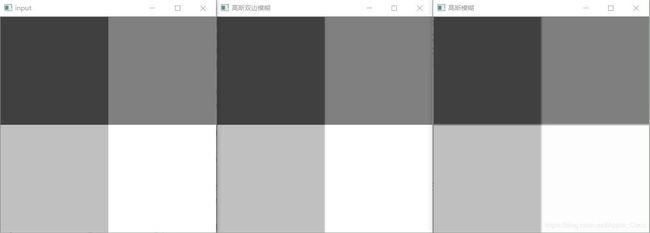
结果展示: