玩转树莓派2017-07-17 18:59
毕业论文
基于微型计算机的人脸识别门禁系统设计


1. 课题意义及目标
随科技的不断发展,安全性的要求也不断提高,IC卡等传统身份识别工具已不能满足社会需求。所以从通用性、安全性、成熟性和造价性等多方面综合考虑,研究新的识别工具是一个必然的趋势。基于人脸识别的门禁系统的设计,能够提高传统安保行业的安全性、方便性、直观性等,最为有效的杜绝了门禁管理中的人为因素,充分体现了门禁管理的人工智能性,避免不必要的安全隐患和人员纠纷。因此本次毕业设计选择了人脸识别门禁系统的研究与实现,以保证门禁数据的真实性,真正做到安全、方便和直观的门禁管理,从而进一步提高公司、仓库、家庭等地的安保水平和管理稳定性。
本次设计将以微型计算机为核心,需选择合适的电源模块、检测模块、、数据存储模块、键盘模块、显示模块和声光报警模块,完成人脸识别系统的检测并报警处理的设计。要求能够将出入门禁系统的人员面部进行识别,能够在人脸数据匹配预存数据库资料时启动门禁系统中开门系统,当人脸数据不匹配预存数据库资料时启动门禁系统中闭门系统,实现防范防盗的作用,创造安全良好的生活工作环境。
2.主要任务
(1)查阅资料,了解人脸识别门禁系统的原理和基本构成,提出系统总体设计方案。
(2)通过学习完成的各个控制硬件电路设计(如检测模块,A/D转换模块,声光报警模块,系统电源模块等)。
(3)完成人脸识别门禁系统的软件设计。
(4)完成人脸识别门禁系统的调试、仿真和实物制作。
(5)完成设计说明书。
基于微型计算机(树莓派)的人脸识别门禁系统
摘 要
随科技的不断发展,社会不断的进步,人们的自身安全意识和要求也再不断提高,IC卡等传统身份识别工具已不能满足社会需求。所以从通用性、安全性、成熟性和造价性等多方面综合考虑,研究新的识别工具是一个必然的趋势。为能够提高传统安保行业的安全性、方便性、直观性和有效的杜绝了门禁管理中的人为因素,通过人工智能方式,避免不必要的安全隐患和人员纠纷。
提出一种基于微型计算机(树莓派)的人脸识别门禁系统,该系统通过使用人脸识别云服务可以实时对人员进行分析辨认,以保证门禁数据的真实性,真正做到安全、方便和直观的门禁管理,从而进一步提高公司、仓库、家庭等地的安保水平和管理稳定性。文中详细描述了该系统的搭建和实现过程,为相关产品提供了一套很好的解决方案。对所设计的系统进行了模拟测试,其测试结果达到了设计目标。
关键词: 微型计算机(树莓派),人脸识别,云服务,Python
目录
第 1 章 绪 论
1.1 研究背景
随着社会的发展,安全教育不断的深化,人们的安全防范意识也逐渐赠强,这里面不光包括个人安全,还涉及到了财产和知识产权的保护,安检的高效,贸易的顺利流通等方面的需求增加,这种生物
由此可设计出人脸识别门禁系统的总体结构框图,如图2-1所示:
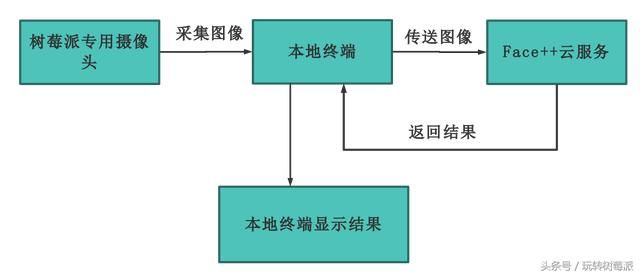
图2.1 人脸识别门禁系统的总结构框图
本次设计中测试及最终使用,一直采用Python2.7编程语言对微型计算机(树莓派)系统进行开发和设计,其中人脸识别调用了face++的API, 官网提供了基于Python的SDK,该语言的可读性高很适合本系统的开发。本系统总体结构图如上。本地终端为微型计算机(树莓派),云服务采用了FACE++人工智能开发平台。
2.2系统主要功能实现
本论文中所设计的系统是对人脸图像进行处理识别并与门禁系统配合起到安全防盗的基本功能。工作原理是首先将三张待检测人员的照片存储到树莓派文件系统,执行此段程序时,调用face++的detectAPI将三张照片中的人脸信息存储在开发者账号,然后执行search的API,对现在进行的人脸识别程序中拍摄的照片进行处理,检测照片中的人脸信息并与之前上传的人脸信息对比,并返回相似度最高的人脸信息。我们在程序中只提取confidence的值,即人脸相似度。当触摸开关被按下,程序会发出警报LED闪烁,接着进行一张人脸的采集。并将此照片与已经上传的三张照片做对比。判断出相似的人脸。当相似度大于70%,则开门(电机正转开门 、停止并发出警报声、电机反转关门)。
系统由微型计算机(树莓派),驱动模块,检测模块,显示模块,报警模块,电源模块等组成。系统带有按键,用户可以通过按键触发人脸识别功能;系统具有采集和检测人脸功能,可以当进入人员匹配成功时,开启大门,同时报警装置启动;当进入人员匹配失败时,大门不开启以保障安全。
在本设计中,系统主要模块各自的功能如下:
(1)主控模块。在本设计中主要起到集中分配的作用,不仅需要即时采集人脸图像,调用API处理图像,同时还要提供摄像头检测、驱动芯片、显示屏等数字器件的工作信号。
(2)按键模块。系统的输入部分,实现人机交互。通过接收触控按键的电平信息,使得微型计算机(树莓派)得到需要的数据。
(3)驱动模块。厂门电极作为大门开闭的过程控制的控制元件,其驱动主要由驱动芯片实现。通过操纵大门电机正转和反转,实现对大门的开闭控制。
(4)显示模块。以连接一台电脑显示器即可
(5)系统电源模块。系统电源模块主要负责给系统提供符合要求的电流与电压,由于微型计算机(树莓派)使用低压直流电压,就需要将两节锂电池18650电源7V转换为符合要求的电压、电流。从而使整个系统有持续的供电保证。[4]
本系统的设计具有半自动门禁系统的特点。待检测人员需要用手按下触摸开关,进而触发人脸识别。系统将对其进行摄像并将图像发送至云端服务进行处理,待处理完之后微型计算机(树莓派)对返回的比对数据结果进行判断。如果对比成功,则驱动步进电机开始旋转。系统的实时性是用户体验的关键要素,系统正常工作时待识别的人员感觉不到卡顿状况 ,实时性良好。
第3章人脸识别门禁系统硬件设计
3.1主控模块

图3.1 主控模板实物图
本次设计的主控模块是使用微型计算机──树莓派3代B型主板。树莓派3代B型主板,该主控板模块的优势是拥有良好的标准模块扩展性,主板上预留的接口可完美对接与之配套的树莓派500万像素专用摄像头、7英寸液晶触摸屏、Sense Hat传感器模块等。除了可以在爱好者论坛下载网民大神们做好的系统包之外,如今还可以直接购买预装了树莓派代3代B型主板专用NOOBs系统的MicroSD卡。说到这里就又促生了树莓派代3代B型主板的进一步优势,那便是与微软的结合,微软为该产品推出了与之适配的Windows 10 IoT版操作系统,用户可以使用到更加熟悉的UI,使得通过标准扩展模块和GPIO接口扩展模块操作变得简单,IP等协议的配置也变得更加简单,同时驱动又在不断更新,不断完善,所以不用再去考虑重新开发Windows的驱动程序,以上这些与树莓派代3代B型主板的结合,对新入门的玩家以及互联网开发者来说是意义非凡的。
主要包括以下几点:
【Raspberry Pi 3 Model B】
· BCM2837
· 64位的1.2GHz四核ARM Cortex-A53
· 1GB内存
· 10/100自适应网卡
· 802.11n WiFi无线网卡
· 低功耗蓝牙4.1 (BLE)
· HDMI接口
· USB 2.0接口 x 4
· MicroSD 卡插槽
· 3.5 mm 音频输出接口
· 40PIN GPIO接口
· CSI摄像头接口
· DSI显示接口
· 升级后的电源管理系统,以便使用更多耗电的外设(须用2.5A以上电源供电) 树莓派3代B型是一款基于ARM的微型计算机主板,以SD/MicroSD卡进行存储,该主板提供USB接口和以太网接口,可以连接键盘、鼠标和网线,该主板具备所有PC的基本功能,例如:高清视频播放、电子表格书写、玩游戏等诸多功能,还整合了视频模拟信号的电视输出接口和HDMI高清视频输出接口。 树莓派将Python作为主要编程语言,支持Java、BBC BASIC (通过 RISC OS 映像或者Linux的"Brandy Basic"克隆)、C 和Perl等编程语言。本设计使用的是最新树莓派官方系统。是基于debian的一种linux32位操作系统。本次设计使用系统中安装的python2.7运行程序。
3.2检测模块
3.2摄像头模块实物图
本次设计的检测模块是使用树莓派专用500W像素摄像头。该摄像头提供了三个应用程序,分别为:raspistill、raspivid、raspistillyuv。其中 raspistill 和 raspistillyuv 非常相似,并且都是用于捕捉图像,而 raspivid 用于捕捉视频。
应用程序使用了四个 OpenMAX(mmal)组件:camera(摄像)、preview(预览)、encoder(编码)、null_sink。所有应用程序均使用了摄像组件,raspistill 使用了图像编码组件,raspivid 使用了视频编码组件,raspistillyuv 没有使用编码组件,而是直接将 YUV 或 RGB 从摄像组件输出到文件。所有应用程序均基于命令行方式运行,通过 OpenMAX 的 mmal API 进行编写。我们在设计中结合Opencv调用摄像头进行拍照操作。
摄像头电路板与树莓派通过一条 15 芯的排线进行连接。具体连接操作如下:先将树莓派上连接座两端卡扣拉起,再把排线插入座中,并竖直,然后按下两端的卡扣。摄像头电路板连接同上。
3.3 驱动模块
当输入信号相对而言比较微弱时,相应功率较小无法正常工作。驱动模块实质是通过放大功率,从而满足负载额定功率使得负载可以正常工作,从而可以响应微弱的输入信号。微型计算机(树莓派)上有IN1, IN2, IN3, IN4四个接口,根据资料,设置为低电平就可以驱动,用杜邦线分别将IN1,IN2,IN3,IN4和GPIO 21(Pin 40),GPIO 20(Pin 38), GPIO 16(Pin 36), GPIO 19(Pin 35)进行连接。每次将四个GPIO端口按下表依次设置好电平后,可以sleep几十毫秒来控制转速
图3.3 步进电机驱动原理

图3.4 树莓派GPIO编码图
3.3.1 步进电机工作原理
在不超过额定负载时,脉冲信号的频率控制电机转动的速度、脉冲数决定电机止步的位置,均不会因为负载变化而受到任何的影响[8]。步进电机每走一步,就要加一个激磁信号,假如适当的信号,转子以一定的步数转动;无激磁信号输入时,转子保持一定的位置。步进电机工作的基本原理如下:
(1)换相顺序的控制
电机通电后,主要通过脉冲分配来实现工作相序的变化。以步进电机四相八拍工作方式为例,要求各相按照A-AB-B-BC-C-CD-D-DA的顺序来工作,控制脉冲就要按照该顺序来控制A、B、C、D相的通断。
(2)步进电机转向的改变
按照既定工作方式正向转动的顺序来给电机通电,电机就会正向转动;但是按照相反顺序来通电的话,电机会向相反方向转动。
(3)步进电机转动速度的改变
步进电机每一次接收到一个控制脉冲,它就会相应转动一步,转动固定角度。因此步进电机的转动速度就由两脉冲的间隔长短来决定,即是两脉冲发送间隔越长,相应的步进电机转动就越慢。如果要实现对步进电机转动速度调节,就需要改变单位时间内控制模块发出的脉冲个数。
步进电机驱动方法有四相四拍运行方式,即AB-BC-CD-DA-AB;四相八拍运行方式,即A-AB-B-BC-C-CD-D-DA-A。
四相步进电机,供电电源为5伏,5伏电源的正极性端连接电机公共端,而 5伏电源的接地端需要分别和电机剩余的四根控制线顺次接触,可以发现电源地线与电机控制线每接触一下,步进电机就会转动一定角度,电机转动完整一圈的时间,恰好需要如此来回转动的次数可以达到5次。由此可以计算出该步进电机的步进角度为
度。若四条控制线与电源地线接触的顺序恰好相反,那么电机也就随之向相反方向转动。
3.3.2 步进电机驱动电路
由于步进电机的驱动电流的数值相对较高,所以单片机与步进电机不能直接连接,常常采用专门的接口及驱动电路。驱动器可以采用功率比较高的复合管,如ULN2003,L298N,或者购买专用的步进电机驱动器。驱动电路的工作状态是由控制信号来决定的,控制信号需要由主控模块,即单片机来产生。期望实现以下的步进电机驱动要求:
(1)期望驱动电路提供的电流上升和下降速度可以比较快,这样可以使电流的波形尽可能的接近矩形波。
(2)期望驱动电路功率和效率相对比较高,提高运行经济性。
单片机的输出电流太小,无法直接连接步进电机,需要加驱动电路。对于电流小于0.5A的步进电机,可以采用ULN2003类的驱动IC。驱动芯片ULN2003内部结构如图3.4所示。

图3.4 ULN2003内部结构框图
ULN2003是由复合达林顿晶体管排列组成,使耐受电压比较高,允许通过电流较大。共有7对NPN达林顿管,分别为芯片7个控制单元,包括功率驱动单元、保护单元等。ULN2003采用DIP-16或者SOP-16双列16脚塑料封装,驱动单元可以与步进电动机直接耦合,连接方便,其数字逻辑电路为非门电路,取反控制。
选取ULN2003作为电机驱动芯片,价格经济,且可以充分发挥功能,实现稳定驱动。可以直接通过电源来调节输出电压,可以直接用单片机的IO口提供信号,而且电路简单。芯片采用单片机作为控制核心,在程序相互调用的方面,更加的方便灵活。

图3.5 ULN2003引脚图
图3.5所示为驱动器引脚图,图左边1~7引脚为输入端,有单片机直接控制,接单片机输出端,引脚8直接接地;右侧10~16引脚为输出端,接步进电机,引脚9接电源+5V,必要时也可以什么都不接悬空而置,该驱动器可提供最高0.5A的电流。
ULN2003的主要特点是:
(1)驱动ULN2003电流比较大。ULN2003可以较好的用于单片机控制的电路。
(2)ULN2003连接上拉电阻,在驱动电机时可以提高其抵抗干扰的能力。ULN2003的每两个达林顿管视为一个单元,都会串联一定阻值的高值电阻可以直接和TTL 或承载电压为5V的CMOS 装置连接 。
(3)ULN2003的输出采用集电极开路,电流输出值比较大,可以达到500mA。因此可以用来驱动电机。
另外,ULN2003的极限参数分别如表3.1、3.2所列。
表3.1 ULN2003的极限参数
表3.2 ULN2003的极限参数
接线时需要把步进电机电路图的红色线悬空,其它线接驱动板。如果驱动不起来,有可能接线不对或电压低。如果用单片机来控制此步进电机,则只需分别依次给各线一定时间的脉冲电流,电机便可连续转动起来。
ULN2003驱动电机的电路图如下图3.6所示。由单片机P3.4—P3.7口经上拉电阻作为驱动芯片ULN2003的输入。COM端供电12V,输出端10至12引脚均接地。四相五线式步进电机的A、B、C、D四相分别与ULN2003的输出端1C—4C连接,接收控制脉冲,实现控制。
图3.6 ULN2003驱动电机的电路图
3.3.3 步进电机的选型
步进电机是一种专门用于位置与速度精确控制的特种电机,虽然同为电机件,步进电机区别于其他控制电机的最大特点是,它主要采用无反馈环节的开环控制,将微观的电脉冲信号转变为宏观电机转动的角位移或线位移。它通过数字来实现电机控制,控制信号以脉冲形式发出,它所接受到的脉冲可以驱使电机转动,即被转化为相应的角位移,所以只要给步进电机一个合适的脉冲信号,它就随之动作固定角度,当采用单片机来控制步进电机相对简单易操作。绕在定子的线圈配置作为步进电机相数分类的主要依据,主要可分为2相、4相、5相等;根据外部引线步进电机又被分为三线式、五线式、六线式等,但各种类型的电机其控制方法并没有发生太大的变化,均采用脉冲信号进行驱动。
门禁系统的运动不需要加速、减速过程,所需转速较低,所以步进电机选用自启动运行方式。自启动运行方式是指在驱动电机旋转和停止时不经过加速、减速阶段,而直接以驱动脉冲速度启动和停止的运行方式。同时,因为在启动、停止时存在一个突然的速度变化,所以这种方式需要较大的加、减速力矩。由于具体负载重量也会影响其是否产生过大的工作噪音,所以四相五线式步进电机的负载容量可以较好满足要求。另外,出于对电流、步距角、静转矩三大要素的考虑,本设计选择四相五线式步进电机来模拟门禁系统的控制,可以直接插接方便使用。
3.4 报警模块
作为人脸识别门禁系统的设备,声光报警电路不可或缺。在系统工作中,每当人脸数据匹配成功时,便会触发蜂鸣器和发光二极管实现声光报警,使监控人员得到开启大门信号,反之则不报警。半导体二极管和普通二极管都是是类似的PN结结构,具有单向导电性,可以将电能转化成光能。 在将电流通到发光二极管之后,电子从N区移动到P区,并且从P区移动到N区的空穴在PN结附近与孔中的电子复合,N区域产生荧光发光提醒。
声光报警设计部分包括蜂鸣器和LED报警指示灯。声音报警电路如图3.11所示,由于微控制器驱动能力的I / O端口较低,所以需要增加蜂鸣器PNP晶体管驱动,可以让那个蜂鸣器的声音听起来更响,更好地发挥警报功能。为了避免错误的报警添加了三极管基电路,蜂鸣器只有在输出低时才会发出声音。

图3.8 声音报警电路原理图
3.5 显示模块
设计中为从一定程度上减小操作人员的工作量,特用电脑显示器作为显示模块,电脑显示器就不做过多阐述了。
3.6电源模块
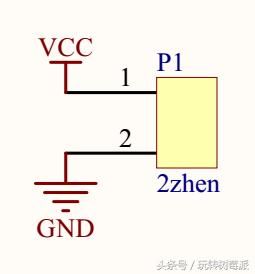
本模块的作用是用来控制电源是否进入工作状态。电源模块一般分为以下几部分:滤波电路模块、全波整流电路模块、电源变压器模块等。一般电源提供的是220V交流电,经过门禁系统的电源模块中变压器的变压,变为直接可以供门禁使用的电压,然后进行全波整流,得到有尖峰脉冲的直流电,然后在滤波电路将有交流成分的电压滤除,最后得到可供系统使用的直流电。但我们的设计不需要这么大电流,电源直接是用两节充电锂电池18650共7v进行供电,所以不需要用稳压芯片。工作原理图如图3.1。
图3.9 电源模块原理图
第4章人脸识别门禁系统软件设计
4.1安装系统
软件部分:win32 DiskImager、SDFormatter、树莓派镜像文件
硬件部分:SD卡、读卡器
准备工作
1.16G的SD卡一张(树莓派3B专用micro SD卡)2.下载树莓派系统镜像文件3.Windows下安装镜像的工具:Win32DiskImager
安装实战
1.解压下载的系统镜像压缩文件,得到img镜像文件2.将SD卡使用卡托或者读卡器后,连上电脑3.解压并运行Win32DiskImager工具4.在软件中选择系统镜像的img文件,“Device”下选择SD卡的盘符,然后点击“Write”然后就开始安装系统了,根据你的SD卡的速度,安装过程有快有慢5.安装结束后会弹出完成对话框,说明安装就完成了。

图4.1 格式化软件工具

图4.2系统烧录软件工具
首先把SD卡连接到电脑,打开SDFormatter.注意观察盘符不要误将其他SD卡格式化。
接下来打开win32 diskimager.打开存放镜像的路径,点击“write” /“yes” 等待镜像烧录成功。
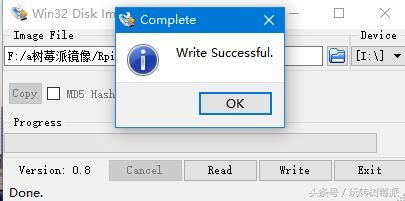
图4.3 烧录成功提醒界面

图4.4 树莓派官方系统Pixel
4.2 配置中文环境以及扩展文件系统
树莓派3B默认是采用英文字库的,而且系统里没有预装中文字库,所以在locale中将其改成中文,也不会显示中文,只会显示一堆方块。因此需要手动来安装中文字体。
ssh中输入以下命令:
安装过程中如果碰到(Y/n),都选择y中文字库安装完成之后,还需要安装一个中文输入法。输入如下命令
一样的安装过程,安装完毕后输入
然后选择change_locale,在Default locale for the system environment:中选择zh_CN.UTF-8,配置完成之后,输入命令
重启完成好就可以在VNC连接上去后使用中文显示和中文输入法了,切换中文输入法一样也是ctrl+space。

图4.5 树莓派安装中文
终端输入:sudo raspi-config 扩展文件系统
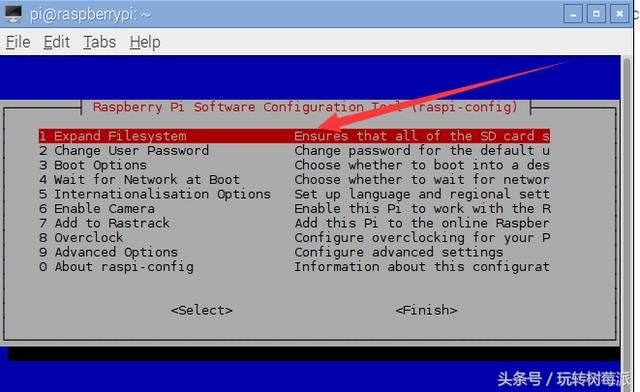
图4.6 树莓派扩展文件系统
“Expand Filesystem” 回车后将SD空间扩展(重启后生效)。配置中文环境如下所示。

图4.7 树莓派设置中文(一)

图4.8 树莓派设置中文(二)
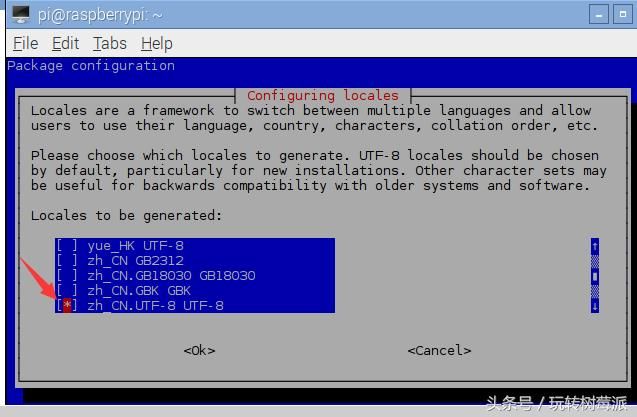
图4.9 树莓派设置中文(三)
空格选中”zh_CN.UTF-8 “ 回车 “ok” 输入:sudo reboot 重启后生效

图4.10 树莓派设置中文(四)

图4.11 树莓派设置中文(五)
4.3 RPI.GPIO搭建及使用介绍
本系统使用的是树莓派官方系统raspbian。系统预装了python和C编译器等软件。运行本次系统前需要对环境进行搭建。树莓派内核中已经编译自带GPIO的驱动,本次设计采用第三方编写好的库函数来完成具体的操作。python GPIO 是一个小型的 python 库,可以帮助用户完成 raspberry 相关 IO 口操作,但是 python GPIO 库还没有支持 SPI、I2C 或者 1-wire 等总线接口。先安装 python-dev,输入以下指令。
sudo apt-get install python-dev
安装 RPi.GPIO,依次输入以下指令。
· 下载:$ wget
· 解压缩:$ tar xvzf RPi.GPIO-0.5.3a.tar.gz
· 进入解压之后的目录 :$ cd RPi.GPIO-0.5.3a
· 启动安装 :$ sudo python setup.py install
导入 RPi.GPIO 模块:
通过该操作,可以将模块名称映射为 GPIO,以便接下来您其它脚本进行使用。
导入模块并检查它是否导入成功,可以尝试:
针脚编号
目前有两种方式可以通过 RPi.GPIO 对 Raspberry Pi 上的 IO 针脚进行编号。
第一种方式是使用 BOARD 编号系统。该方式参考 Raspberry Pi 主板上 P1 接线柱的针脚编号。使用该方式的优点是无需考虑主板的修订版本,您硬件始终都是可用的状态。您将无需从新连接线路和更改您的代码。
第二种方式是使用 BCM 编号。这是一种较低层的工作方式 – 该方式参考 Broadcom SOC 的通道编号。使用过程中,您始终要保证主板上的针脚与图表上标注的通道编号相对应。您的脚本可能在 Raspberry Pi 主板进行修订版本更新时无法工作。
指定您所使用的方式(必须指定):
或者
Raspberry Pi 的 GPIO 上可能同时有多个脚本/循环。因此,如果 RPi.GPIO 检测到某个针脚被设置为其它用途而非默认的状态(默认为输入),您会在尝试配置某脚本时得到警告消息。禁用该警告消息:
为每个用于输入或输出的针脚配置通道。配置为输入的通道:
通道编号是基于您所使用的编号系统所指定的(BOARD 或 BC)。配置为输出的通道:
通道编号是基于您所使用的编号系统所指定的(BOARD 或 BCM)。可以指定输出通道的初始值:
输入读取 GPIO 针脚的值:
通道编号是基于您所使用的编号系统所指定的(BOARD 或 BCM)。)这将返回 0 / GPIO.LOW / False 或者 1 / GPIO.HIGH / True。
设置 GPIO 针脚的输出状态:
通道编号是基于您所使用的编号系统所指定的(BOARD 或 BCM)。)
状态可以为 0 / GPIO.LOW / False 或者 1 / GPIO.HIGH / True。在任何程序结束后,请养成清理用过的资源的好习惯。使用 RPi.GPIO 也同样需要这样。恢复所有使用过的通道状态为输入,您可以避免由于短路意外损坏您的 Raspberry Pi 针脚。注意,该操作仅会清理您的脚本使用过的 GPIO 通道。
脚本结束后进行清理:
4.4 Opencv运行环境的搭建
首先进入Raspberry Pi系统,将树莓派连上网络,然后Ctrl + Alt +t打开命令终端(直接点击终端图标可能会卡),如果终端窗口没有出现的话,从顶部任务栏可以找到,点开就好。首先是以下这几条更新命令,每次单独执行:
sudo apt-get update
sudo apt-get upgrade
sudo rpi-update
然后执行安装opencv的构建相关命令:
sudo apt-get install build-essential git cmake pkg-config
然后是以下这几条命令安装图片工具包,每次单独执行(网上有很多一起执行的,但是经常出现问题)
sudo apt-get install libjpeg8-dev
sudo apt-get install libtiff5-dev
sudo apt-get install libjasper-dev
sudo apt-get install libpng12-dev
然后是视频I/O包:
sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev
下面安装GTK:
sudo apt-get install libgtk2.0-dev
然后安装优化函数的包:
sudo apt-get install libatlas-base-dev gfortran
然后执行以下命令下载opencv3.0:
cd /home/pi
git clone https://github.com/opencv/opencv.git
cd opencv
git checkout 3.0.0
然后安装opencv_contrib:
cd /home/pi
git clone https://github.com/opencv/opencv_contrib.git
cd opencv_contrib
git checkout 3.0.0
然后安装开发包:
sudo apt-get install python2.7-dev
然后安装pip: SHAPE * MERGEFORMAT
wget https://bootstrap.pypa.io/get-pip.py
sudo python get-pip.py
然后安装virtualenv virtualenvwrapper:
sudo pip install virtualenv virtualenvwrapper
sudo rm -rf ~/.cache/pip
下面这个步骤不仅仅是命令了,打开~/.profile文件,我是使用vim打开的:
sudo nano ~/.profile(”~”符号树莓派键盘打不出来 用笔记本SSH连上去)
打开profile后,在这个文件最后,添加以下内容后保存退出:
# virtualenv and virtualenvwrapper
export VIRTUALENVWRAPPER_PYTHON=/usr/bin/python2.7
export WORKON_HOME=$HOME/.virtualenvs
source /usr/local/bin/virtualenvwrapper.sh
然后执行下面这个命令:
source ~/.profile
然后创建虚拟工作环境并进入:
sudo mkvirtualenv LC
workon LC
一定要确保进去刚刚创建的虚拟环境了,进入虚拟环境的标志是进去后命令的最前面(绿字前面)都会增加“(LC)”。
下面在虚拟环境中安装numpy:
pip install numpy
sudo rm -rf ~/.cache/pip/
pip install numpy
一定确保在刚刚的虚拟环境下进行以下操作,如果新开了一个命令行窗口,那么就依次执行 source ~/.profile 命令和 workon LC 命令进入虚拟环境再执行以下操作。
执行以下命令来设置编译:
cd ~/opencv
mkdir build
cd build
cmake -D CMAKE_BUILD_TYPE=RELEASE
-D CMAKE_INSTALL_PREFIX=/usr/local
-D INSTALL_C_EXAMPLES=ON
-D INSTALL_PYTHON_EXAMPLES=ON
-D OPENCV_EXTRA_MODULES_PATH=~/opencv_contrib/modules
-D BUILD_EXAMPLES=ON ..
执行以下命令开始正式编译opencv3.0:
make -j4
编译完后进行安装:
sudo make install
安装后进行相关配置:
sudo ldconfig
配置完成
本次设计主要利用opencv进行拍照,确实是有点大材小用。但是通过opencv的使用,加深了对图形处理方面的简单认识和理解。在设计之余学会了opencv进行简易人脸识别的原理。
4.5 系统程序设计
主程序设计
流程图
触摸开关
流程图
摄像头
流程图
步进电机
流程图
第5章系统运行以及源代码分析
5.1 树莓派系统使用说明
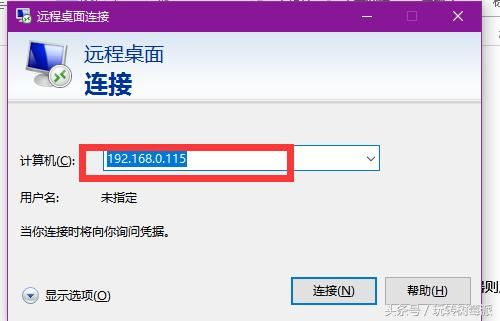
树莓派系统:可以直接用显示器进入系统桌面也可以远程桌面进入系统,或者putty软件SSH。本设计以远程桌面登陆为例。登陆路由器查询分配给树莓派的ip地址。打电脑的远程桌面软件。输入树莓派的IP地址,本次设计中树莓派的IP是192.168.0.115。用户名为pi,密码:raspberry远程桌面进去系统后还可以再去连接本地wifi信号。

5.2 旷视FACE++ API使用说明
本次设计对图像的处理是通过云服务来实现的。主要是调用Face++的API来实现的照片中人脸的对比。首先将三张照片上传树莓派或者用树莓派摄像头采集三张照片。调用Detect API进行人脸检测和人脸分析。识别出的人脸会给出face_token,用于后续的人脸比对等操作。当触摸开关出发实时拍照之后,调用Search API在Faceset中找出与目标人脸最相似的一张或多张人脸。支持传入face_token或者直接传入图片进行人脸搜索。使用图片进行比对时会选取图片中检测到人脸尺寸最大的一个人脸。
Sdk的facepp.py文件中包含如下底层api接口提供我们使用。
_APIS = [
'/detect',
'/detection/landmark'
'/compare',
'/search',
'/faceset/create',
'/faceset/addface',
'/faceset/removeface',
'/faceset/update',
'/faceset/getdetail',
'/faceset/delete',
'/faceset/getfacesets',
'/face/analyze',
'/face/getdetail',
'/face/setuserid'
]

图5.1 创建FACE++ API key
Detect API
调用者提供图片文件或者图片URL,进行人脸检测和人脸分析。识别出的人脸会给出face_token,用于后续的人脸比对等操作。请注意,只对人脸包围盒面积最大的5个人脸进行分析,其他人脸可以使用Face Analyze API进行分析。如果您需要使用检测出的人脸于后续操作,建议将对应face_token添加到FaceSet中。如果一个face_token连续72小时没有存放在任意FaceSet中,则该face_token将会失效。如果对同一张图片进行多次人脸检测,同一个人脸得到的face_token是不同的。
Search API
在Faceset中找出与目标人脸最相似的一张或多张人脸。支持传入face_token或者直接传入图片进行人脸搜索。使用图片进行比对时会选取图片中检测到人脸尺寸最大的一个人脸。
成功请求返回值示例:


5.3 系统调试及运行
整体流程:将三张待检测人员的照片存储到程序所在目录,执行程序时,调用face++的detectAPI将三张照片中的人脸信息存储在开发者账号,然后执行search的API对程序过程中拍摄的照片进行处理。检测照片中的人脸信息与之前上传的人脸信息对比,如果相似度达到百分之80以上返回相似度最高的人脸信息。

图5.2 程序目录
5.3.1程序初始设置
首先将自己的照片上传到本文件夹并修改图片文件名,然后在代码中将三张待对比照片赋值给face_one、face_two、face_three三个变量。并设置进行对比的照片名为customer.jpg。
face_one = 'face_one.jpg'
face_two = 'face_two.jpg'
face_three = 'face_three.jpg'
face_search = 'customer.jpg'
设置GPIO编码方式为board,GPIO13为输入模式,GPIO11,12,15,16,40为输出模式。
GPIO.setmode(GPIO.BOARD)
GPIO.setwarnings(False)
GPIO.setup(13,GPIO.IN)
GPIO.setup(11,GPIO.OUT)
GPIO.setup(12,GPIO.OUT)
GPIO.setup(15,GPIO.OUT)
GPIO.setup(16,GPIO.OUT)
GPIO.setup(40,GPIO.OUT)
在python程序中设置调用API的key和secret。
#http_url='https://api-cn.faceplusplus.com/facepp/v3/detect'
key = "xzFPqqR1q_fasM1D3s4yvUdcBoTovUMX"
secret = "4GXhLafqDOmnfQRxx-6ZlEVwQpOlZoW-"
api = facepp.API(key, secret)
5.3.2 各功能函数
#蜂鸣器,前面已经初始设置GPIO12为输出模式,此处bee()函数设置gpio12为干电平,延时0.5s后置为低。意味着当调用bee()函数时蜂鸣器鸣叫0.5s.
def bee():
GPIO.output(12, False)
time.sleep(0.5)
GPIO.output(12, True)
#步进电机,设置旋转角度为180°,closewise=1时,步进电机顺时针旋转,closewise=0时,步进电机逆时针旋转。步进电机驱动模块由树莓派的GPIO35、 GPIO36、 GPIO38 、GPIO40四个GPIO驱动。
def motor_open():
steps = 180;
clockwise = 1;
arr = [0,1,2,3];
if clockwise!=1:
arr = [3,2,1,0];
ports = [40,38,36,35] # GPIO 21(Pin 40) GPIO 20(Pin 38) GPIO 16(Pin 36) GPIO 19(Pin 35)
for p in ports:
GPIO.setup(p,GPIO.OUT)
for x in range(0,steps):
for j in arr:
time.sleep(0.002)
for i in range(0,4):
if i == j:
GPIO.output(ports[i],True)
else:
GPIO.output(ports[i],False)
#流水灯:初始设置已经将GPIO11、GPIO15、GPIO16为输出模式。分别把三个LED发光二极管的长引脚接到这三个GPIO上,短引脚接至负极。通过把对应的引脚置为高电平延时0.3s后置为低,循环点亮三个小灯。
def light():
GPIO.output(11, True)
time.sleep(0.3)
GPIO.output(11, False)
GPIO.output(15, True)
time.sleep(0.3)
GPIO.output(15, False)
GPIO.output(16, True)
time.sleep(0.3)
GPIO.output(16, False)
#提示做好准备 ,一段时间后进行拍照。在终端窗口输出提示信息。并调用light()来实现LED发光二极管的流水灯效果。并调用bee()让蜂鸣器发出提示声音。
def prep():
print("欢迎使用人脸识别检测系统 请面对摄像头 5秒钟后进行人脸采集")
light()
print("************************5*********************")
light()
print("************************4*********************")
light()
print("************************3*********************")
light()
print("************************2*********************")
light()
print("************************1*********************")
bee()
#调用拍照函数时流水灯点亮,然后使用opencv利用摄像头采集一张照片,将照片保存为customer.jpg。
def take_photo():
light()
capture = cv2.VideoCapture(0)
if not capture.isOpened(): print('Capture failed because of camera')
ret, img = capture.read()
cv2.imwrite('customer.jpg', img)
print("***********************照片采集完毕 请稍等*************************")
print '=' * 60
#函数调用API将本地存储的照片进行人脸检测和人脸分析。识别出的人脸会给出face_token,用于后续的人脸比对等操作。然后调用searchAPI在Faceset中找出与目标人脸最相似的一张或多张人脸。进行比对时会选取图片中检测到人脸尺寸最大的一个人脸。

触发检测的监测函数det(),程序运行时开始检测触摸开关是否被触发。当触摸开关被触发时会发送高电平信号给树莓派。当检测GPIO13为真时,在终端输出确定信息,并调用主函数进行对比操作。主程序运行结束后继续检测是否被触发。一直循环指导程序退出。
def det():
while True:
if GPIO.input(13)==True:
print "confirm"
main()
else:
print "NO BODY"
time.sleep(2)
det()
提取API.search返回结果,并将返回的信息保存到s,并从中提取相似度的值。转换s[0][‘configdence’]为整形变量赋值给m。当m大于70时输出通过检测并调用步进电机转动。
5.3.3异常处理

当检测时由于没有拍摄到正常的人脸照片,程序则可能由于没有正常的人脸库而报错。此时须将下图中ret=api……注释掉,并将上一行的注释符号“#”取消。

图5.7 处理报错信息(一)
保存并上传后再次运行。清除无用的人脸库。
然后再将代码修改为初始代码,再次进行正确的人脸采集,程序才可以正常运行。

图5.7 创建一个faceset
这种方式解决报错是复杂的一个过程。由于目的只是删除无用的人脸库,所以新建了一个debug.py的python文件。当检测失败之后执行一次debug.py即可。
import facepp
#http_url='https://api-cn.faceplusplus.com/facepp/v3/detect'
key = "xzFPqqR1q_fasM1D3s4yvUdcBoTovUMX"
secret = "4GXhLafqDOmnfQRxx-6ZlEVwQpOlZoW-"
api = facepp.API(key, secret)
# 创建一个Faceset用来存储FaceToken
# create a Faceset to save FaceToken
def main():
api.faceset.delete(outer_id='detect', check_empty=0)
#ret = api.faceset.create(outer_id='detect')
#print_result("faceset create", ret)
main()