1. 前言
Bloom Filter的名字早有耳闻,但一直没看实现原理。今天乘地铁时心血来潮看了算法,顿时被其简单与优雅震惊。摘录下wiki上的介绍:
A Bloom filter is a space-efficient probabilistic data structure, conceived by Burton Howard Bloom in 1970, that is used to test whether an element is a member of a set.
Bloom Filter是一种高效利用空间的概率数据结构,由Burton Howard Bloom于1970年发明,用于检测一个元素是否属于一个集合。
讲个小插曲,我刚开始以为bloom作「开花,繁盛」解,没想到是发明人的名字,真相总是没有想象的美好呢…
我的实现:https://github.com/liquidconv/DSAF
2. 学习Bloom Filter
2.1 爬虫与集合操作
Bloom Filter通常和爬虫联系在一起,所以用这个例子解释其特性再好不过。爬虫最常用的抓取方法是广度优先搜索BFS,概括地说就是:
- 维护一个待访问链接的队列
- 每次将队首元素,即里第一个链接出队
- 将该链接对应的页面上所有链接入队
- 重复1~3至队列空为止
上面的描述里存在一个很大的问题——第三步里要加入队列的链接可能没有访问过,可能已经访问过,如果不做判断一律加入的话,一个相同的页面就可能被访问几千几万次,造成资源浪费。
要解决也很简单,只要维护一个访问过链接的集合就可以了。链接入队之前,先判断是否属于该集合,即是否已经访问过了,属于就不入队,不属于才入队。
2.2 思考
我们需要一个「集合」数据结构,至少要能够支持插入元素到集合和判断元素是否属于集合——也就是插入和属于这两种操作,要怎么实现呢?
可行思路:数组/链表/树/哈希表
暂时不考虑插入和查找操作的时间复杂度,上面每种做法里数据单元(数组的元素,链表和树的节点,哈希表的表项)定义形式基本都是:
typedef struct data_item {
key k; // 原始数据,或者原始数据的hash值等
extra e ; // 附加信息,指向其它节点的指针等
};
每次向集合插入元素都要生成新的data_item,空间复杂度是O(N),大数据情况下hold不住。
算法里经常有时空权衡的问题,可以用空间换时间保存子问题结果,比如动态规划;可以用时间换空间,比如用泰勒展开计算三角函数。当时间和空间都不能牺牲的时候,就只能牺牲正确率了。Bloom Filter之所以称为概率数据结构,就是因为它的操作结果有一定概率是错误的。
2.3 图解Bloom Filter
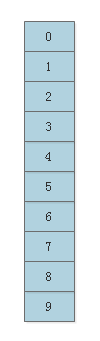
Bloom Filter的核心是一个m位的bitset和k个hash函数。
初始时bitset中所有位的值都设置为0,假设取m = 10,k = 3,用蓝色表示某位为0,红色表示为1:
插入元素的过程是三步走:
- 计算k个hash值
- 将k个hash值对m取模得到k个下标
- 将bitset中k个下标对应的位设置为1
比如向刚才的Bloom Filter插入元素“Alice”。分别用3个hash函数计算“Alice”的hash值,将hash值对10取模,得到在[0, 10)范围内的r1、r2、r3,假设计算结果为:
r1 = h1("Alice") % m = 1
r2 = h2("Alice") % m = 3
r3 = h3("Alice") % m = 5
于是将bitset中第1位、第3位和第5位的值置为1:

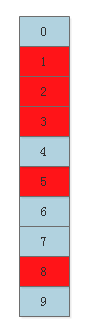
再插入元素“Bob”的过程还是一样的,假设:
r1 = h1("Bob") % m = 8
r2 = h2("Bob") % m = 2
r3 = h3("Bob") % m = 3
那就将bitset中第2位、第3位、第8位的值置为1(值已经为1的第3位不动):
图形化思考的话就是,Bloom Filter运行过程中不断插入新元素,bitset里的0逐渐被翻转成1。
怎么判断元素“Alice”是否在集合里呢?同样还是三步走:
- 计算k个hash值
- 将k个hash值对m取模得到k个下标
- 检查bitset中k个下标对应的位是否都为1
如果Bloom Filter里有“Alice”,那bitset中相应的k位值显然都为1。问题是即使Bloom Filter里没有“Alice”,还是可能由于之前插入的元素而导致“Alice”对应的k位值都为1,因此会错误地认为集合里已经有“Alice”了,这就是Bloom Filter会出错的地方。
由于bitset里每位都和多个元素有关,将某个为1的位置为0,涉及到这位的元素都会被认为不属于集合,所以Bloom Filter不支持删除操作。
2.4 复杂度分析
空间复杂度方面,Bloom Filter不会动态增长,运行过程中维护的始终只是m位的bitset,所以空间复杂度只有O(m)。
时间复杂度方面,Bloom Filter的插入与属于操作主要都是在计算k个hash,所以都是O(k)。
3. 实现Bloom Filter
3.1 定义Bloom Filter类
STL里的bitset定义时就要给定长度,而且之后不能改变,所以我用了vector
#ifndef __BLOOM_FILTER_H__
#define __BLOOM_FILTER_H__
#include
#include
class BloomFilter {
public:
BloomFilter(unsigned int m, unsigned int k);
void insertElement(std::string s);
bool existsElement(std::string s);
private:
unsigned int BKDR_Hash(std::string s, unsigned int i);
unsigned int getSeed(unsigned int hash_index);
std::vector table;
unsigned int _m;
unsigned int _k;
};
#endif // __BLOOM_FILTER_H__
定义非常简单:
- _m是bitset的大小,table是bitset
- _k是hash函数的数量
- BKDR_Hash是使用了参数seed的hash函数
- 用getSeed生成_k种seed,相当于有了_k种hash函数
- insertElement对于插入操作
- existsElement对应查找操作
构造函数
BloomFilter::BloomFilter(unsigned int m, unsigned int k):
_m(m), _k(k) {
table.resize(_m);
for(int i = 0; i < _m; ++i)
table[i] = false;
}
3.2 插入与属于
插入操作 = 计算_k个hash值,将table中对应位置改为true:
void BloomFilter::insertElement(string s) {
for(int i = 0; i < _k; ++i) {
unsigned int index = BKDR_Hash(s, i);
table[index] = true;
}
}
属于操作 = 计算_k个hash值,检查table中对应位置是否都为true:
bool BloomFilter::existsElement(string s) {
for(int i = 0; i < _k; ++i) {
unsigned int index = BKDR_Hash(s, i);
if(!table[index])
return false;
}
return true;
}
3.3 BKDR Hash
选择BKDR Hash最主要的原因就是有参数seed,很容易就能构造一族Hash函数。seed是个「魔数」(magic number),所以不用多纠结,推荐取的值为:
131,1313,13131,...
生成第hash_index个Hash函数的seed:
unsigned int BloomFilter::getSeed(unsigned int hash_index) {
string seed = "13";
for(int i = 0; i < hash_index; ++i)
seed += (i % 2 == 0)? "1" : "3";
return atoi(seed.c_str());
}
用第hash_index个Hash函数计算字符串s的hash值:
unsigned int BloomFilter::BKDR_Hash(string s, unsigned int hash_index) {
const char *ps = s.c_str();
unsigned int seed = getSeed(hash_index);
unsigned int hash = 0;
for(int i = 0; i < s.size(); ++i)
hash += hash * seed + ps[i];
return hash % _m;
}
4. 数学部分
Bloom Filter的原理已经讲完,但还是有必要提一下错误率的问题。错误率有两种:
- FP = false positive
- FN = false negative
对应Bloom Filter的情况下,FP就是「集合里没有某元素,查找结果是有该元素」,FN就是「集合里有某元素,查找结果是没有该元素」。FN显然总是0,FP会随着Bloom Filter中插入元素的数量而增加——极限情况就是所有bit都为1,这时任何元素都会被认为在集合里。
FP的推导并不复杂,wiki上有非常详细的过程,这里就简单地抄个结果,其中n是当前集合里元素的数量:

从这个公式里可以读出一些直观的信息:
- n = 0时,FP = 0;n趋于无穷大时,FP趋于1
- k/m和n保持不变时,k越大,FP越小
m和k决定了Bloom Filter的「容量」,当然hash函数的选择也很重要。
5. 参考资料
- Bloom Filter
https://en.wikipedia.org/wiki/Bloom_filter - Precision and recall
https://en.wikipedia.org/wiki/Precision_and_recall - BloomFilter——大规模数据处理利器
http://www.cnblogs.com/heaad/archive/2011/01/02/1924195.html - 各种Hash函数和代码
http://www.cppblog.com/bellgrade/archive/2009/09/29/97565.html