Python求凸包及多边形面积
一般有两种算法来计算平面上给定n个点的凸包:Graham扫描法(Graham’s scan),时间复杂度为O(nlgn);Jarvis步进法(Jarvis march),时间复杂度为O(nh),其中h为凸包顶点的个数。这两种算法都按逆时针方向输出凸包顶点。
Graham扫描法
用一个栈来解决凸包问题,点集Q中每个点都会进栈一次,不符合条件的点会被弹出,算法终止时,栈中的点就是凸包的顶点(逆时针顺序在边界上)。
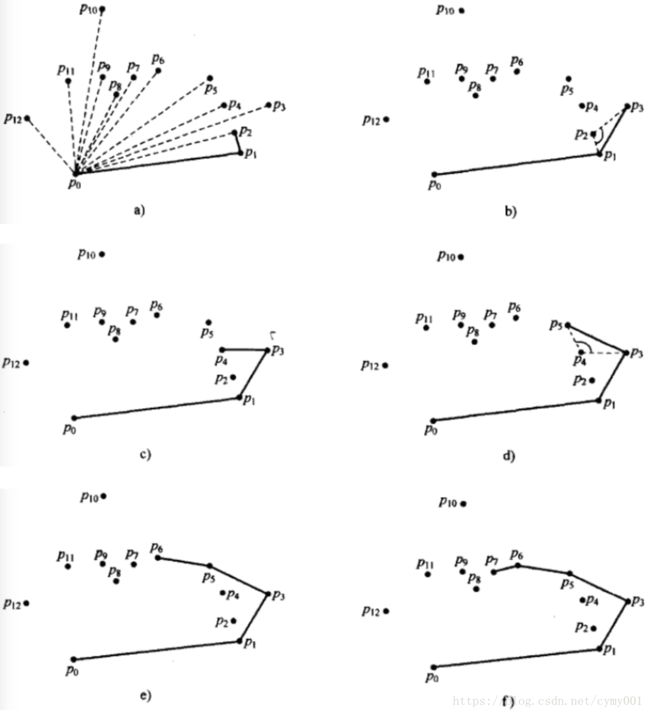
算法步骤如下图:
import sys
import math
import time
import random
#获取基准点的下标,基准点是p[k]
def get_leftbottompoint(p):
k = 0
for i in range(1, len(p)):
if p[i][1] < p[k][1] or (p[i][1] == p[k][1] and p[i][0] < p[k][0]):
k = i
return k
#叉乘计算方法
def multiply(p1, p2, p0):
return (p1[0] - p0[0]) * (p2[1] - p0[1]) - (p2[0] - p0[0]) * (p1[1] - p0[1])
#获取极角,通过求反正切得出,考虑pi/2的情况
def get_arc(p1, p0):
# 兼容sort_points_tan的考虑
if (p1[0] - p0[0]) == 0:
if ((p1[1] - p0[1])) == 0:
return -1;
else:
return math.pi / 2
tan = float((p1[1] - p0[1])) / float((p1[0] - p0[0]))
arc = math.atan(tan)
if arc >= 0:
return arc
else:
return math.pi + arc
#对极角进行排序,排序结果list不包含基准点
def sort_points_tan(p, pk):
p2 = []
for i in range(0, len(p)):
p2.append({"index": i, "arc": get_arc(p[i], pk)})
#print('排序前:',p2)
p2.sort(key=lambda k: (k.get('arc')))
#print('排序后:',p2)
p_out = []
for i in range(0, len(p2)):
p_out.append(p[p2[i]["index"]])
return p_out
def convex_hull(p):
p=list(set(p))
#print('全部点:',p)
k = get_leftbottompoint(p)
pk = p[k]
p.remove(p[k])
#print('排序前去除基准点的所有点:',p,'基准点:',pk)
p_sort = sort_points_tan(p, pk) #按与基准点连线和x轴正向的夹角排序后的点坐标
#print('其余点与基准点夹角排序:',p_sort)
p_result = [pk,p_sort[0]]
top = 2
for i in range(1, len(p_sort)):
#####################################
#叉乘为正,向前递归删点;叉乘为负,序列追加新点
while(multiply(p_result[-2], p_sort[i],p_result[-1]) > 0):
p_result.pop()
p_result.append(p_sort[i])
return p_result#测试if __name__ == '__main__':
pass
test_data = [(220, -100), (0,0), (-40, -170), (240, 50), (-160, 150), (-210, -150)]
print(test_data)
result = convex_hull(test_data)
print(result)
t=0
import matplotlib.pyplot as plt
x1=[]
y1=[]
for i in range(len(test_data)):
ri=test_data[i]
#print(ri)
x1.append(ri[0])
y1.append(ri[1])
plt.plot(x1,y1,linestyle=' ',marker='.')
xx=[]
yy=[]
for i in range(len(result)):
ri=result[i]
#print(ri)
xx.append(ri[0])
yy.append(ri[1])
plt.plot(xx,yy,linestyle=' ',marker='*')
计算多边形面积
(1)顺时针给定构成凸包的n个点坐标,叉乘法求多边形面积:

def GetAreaOfPolyGonbyVector(points):
# 基于向量叉乘计算多边形面积
area = 0
if(len(points)<3):
raise Exception("error")
for i in range(0,len(points)-1):
p1 = points[i]
p2 = points[i + 1]
triArea = (p1[0]*p2[1] - p2[0]*p1[1])/2
#print(triArea)
area += triArea
fn=(points[-1][0]*points[0][1]-points[0][0]*points[-1][1])/2
#print(fn)
return abs(area+fn)
points = []
x = [1,3,2]
y = [1,2,2]
#[(1,1),(3,1),(5,3),(3,5),(1,3)]
# x=[1,3,5,3,1]
# y=[1,1,3,5,3]
for index in range(len(x)):
points.append((x[index],y[index]))
area = GetAreaOfPolyGonbyVector(points)
print(area)
#print(math.ceil(area))(2)顺时针给定构成凸包的n个点经纬度坐标,先将经纬度坐标转化成凸多边形的边的经纬度距离,利用海伦公式求多边形面积:
from geopy.distance import vincenty
import math
def HeronGetAreaOfPolyGonbyVector(points):
# 基于海伦公式计算多边形面积
area = 0
if(len(points)<3):
raise Exception("error")
pb=((points[-1][0]+points[0][0])/2,(points[-1][1]+points[0][1])/2) #基准点选为第一个点和最后一个点连线边上的中点
for i in range(0,len(points)-1):
p1 = points[i]
p2 = points[i + 1]
db1 = vincenty(pb,p1).meters #根据维度转化成经纬度距离
d12 = vincenty(p1,p2).meters
d2b = vincenty(p2,pb).meters
#print(db1,d12,d2b)
hc = (db1+d12+d2b)/2 #db1是基准点和p1的距离,d12是p1和p2的距离,d2b是p2和基准点距离
#print(hc, hc-db1, hc-d12, hc-d2b)
triArea = math.sqrt(hc*(hc-db1)*(hc-d12)*(hc-d2b))
#print(triArea)
area += triArea
return area
points = []
x = [1,3,2]
y = [1,2,2]
#[(1,1),(3,1),(5,3),(3,5),(1,3)]
# x=[1,3,5,3,1]
# y=[1,1,3,5,3]
for index in range(len(x)):
points.append((x[index],y[index]))
area = HeronGetAreaOfPolyGonbyVector(points)
print(area)
#print(math.ceil(area))Graham程序原理
(1)基准点的确认原则:
有唯一的某个点纵坐标最小,该点为基准点;
不止一个点的纵坐标最小,选这些点里最靠左的为基准点
(2)计算叉乘【后续利用叉乘正负判断夹角是否大于 180o 180 o 】:
(3)获取极角,通过求反正切得出:
若横纵坐标都相等(两点相同),返回-1;
若横坐标相等/纵坐标不相等(两点连线垂直y轴),返回 π2 π 2 ;
若横坐标不相等,计算 tanθ=p1y−p0yp1x−p0x t a n θ = p 1 y − p 0 y p 1 x − p 0 x ,则 θ=arctan(p1y−p0yp1x−p0x) θ = a r c t a n ( p 1 y − p 0 y p 1 x − p 0 x ) ,若 θ≥0 θ ≥ 0 ,返回 θ θ ;若 θ<0 θ < 0 ,返回 π−θ π − θ 【结合反正切的主值区间考虑】
(4)对极角进行排序,排序结果list不包含基准点:
p2=[{"index":0, "arc":get_arc(p[0],p[k])},
{"index":1, "arc":get_arc(p[1],p[k])},
···
{"index":k-1, "arc":get_arc(p[k-1],p[k])},
{"index":k+1, "arc":get_arc(p[k+1],p[k])},
···
{"index":n, "arc":get_arc(p[n],p[k])}]
#get_arc(p[0],p[k])即获得p[0]点与基准点p[k]连线的极角(与x轴正向夹角)
#根据p2的“arc”键的值从小到大排序,最后输出按该角度值排序对应顺序的各个点(5)逆时针确定凸多边形:

主要是找角度是否大于 180o 180 o ——差乘正负——点进出栈顺序三者关系
注意差乘函数:multiply(p1,p2,p0)=(p1−p0)×(p2−p0) 注 意 差 乘 函 数 : m u l t i p l y ( p 1 , p 2 , p 0 ) = ( p 1 − p 0 ) × ( p 2 − p 0 )
加p_3:
p2p1×p2p3=(p1−p2)×(p3−p2)=multiply(p1,p3,p2)>0,夹角小于180o,删p2,栈内p0,p1,p3 p 2 p 1 × p 2 p 3 = ( p 1 − p 2 ) × ( p 3 − p 2 ) = m u l t i p l y ( p 1 , p 3 , p 2 ) > 0 , 夹 角 小 于 180 o , 删 p 2 , 栈 内 p 0 , p 1 , p 3
加p_4:
p3p1×p3p4=(p1−p3)×(p4−p3)=multiply(p1,p4,p3)<0,夹角大于180o,留p3,栈内p0,p1,p3,p4 p 3 p 1 × p 3 p 4 = ( p 1 − p 3 ) × ( p 4 − p 3 ) = m u l t i p l y ( p 1 , p 4 , p 3 ) < 0 , 夹 角 大 于 180 o , 留 p 3 , 栈 内 p 0 , p 1 , p 3 , p 4
加p_5:
p4p3×p4p5=(p3−p4)×(p5−p4)=multiply(p3,p5,p4)>0,夹角大于180o,删p4,栈内p0,p1,p3,p5 p 4 p 3 × p 4 p 5 = ( p 3 − p 4 ) × ( p 5 − p 4 ) = m u l t i p l y ( p 3 , p 5 , p 4 ) > 0 , 夹 角 大 于 180 o , 删 p 4 , 栈 内 p 0 , p 1 , p 3 , p 5
加p_6:
p5p3×p5p6=(p3−p5)×(p6−p5)=multiply(p3,p6,p5)<0,夹角大于180o,留p5,栈内p0,p1,p3,p5,p6 p 5 p 3 × p 5 p 6 = ( p 3 − p 5 ) × ( p 6 − p 5 ) = m u l t i p l y ( p 3 , p 6 , p 5 ) < 0 , 夹 角 大 于 180 o , 留 p 5 , 栈 内 p 0 , p 1 , p 3 , p 5 , p 6
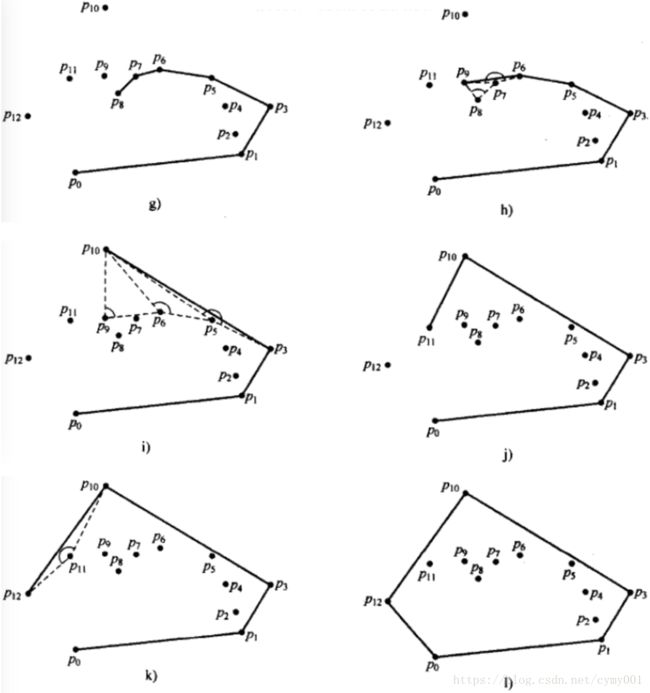
加p_7:
p6p5×p6p7=(p5−p6)×(p7−p6)=multiply(p5,p7,p6)<0,夹角大于180o,留p6,栈内p0,p1,p3,p5,p6,p7 p 6 p 5 × p 6 p 7 = ( p 5 − p 6 ) × ( p 7 − p 6 ) = m u l t i p l y ( p 5 , p 7 , p 6 ) < 0 , 夹 角 大 于 180 o , 留 p 6 , 栈 内 p 0 , p 1 , p 3 , p 5 , p 6 , p 7
加p_8:
p7p6×p7p8=(p6−p7)×(p8−p7)=multiply(p6,p8,p7)<0,夹角大于180o,留p7,栈内p0,p1,p3,p5,p6,p7,p8 p 7 p 6 × p 7 p 8 = ( p 6 − p 7 ) × ( p 8 − p 7 ) = m u l t i p l y ( p 6 , p 8 , p 7 ) < 0 , 夹 角 大 于 180 o , 留 p 7 , 栈 内 p 0 , p 1 , p 3 , p 5 , p 6 , p 7 , p 8
加p_9:
p8p7×p8p9=(p7−p8)×(p9−p8)=multiply(p7,p9,p8)>0,夹角小于180o,删p8,栈内p0,p1,p3,p5,p6,p7 p 8 p 7 × p 8 p 9 = ( p 7 − p 8 ) × ( p 9 − p 8 ) = m u l t i p l y ( p 7 , p 9 , p 8 ) > 0 , 夹 角 小 于 180 o , 删 p 8 , 栈 内 p 0 , p 1 , p 3 , p 5 , p 6 , p 7
p7p6×p7p9=(p6−p7)×(p9−p7)=multiply(p6,p9,p7)<0,夹角小于180o,删p7,栈内p0,p1,p3,p5,p6 p 7 p 6 × p 7 p 9 = ( p 6 − p 7 ) × ( p 9 − p 7 ) = m u l t i p l y ( p 6 , p 9 , p 7 ) < 0 , 夹 角 小 于 180 o , 删 p 7 , 栈 内 p 0 , p 1 , p 3 , p 5 , p 6
p6p5×p6p9=(p5−p6)×(p9−p6)=multiply(p5,p9,p6)<0,夹角小于180o,删p6,栈内p0,p1,p3,p5 p 6 p 5 × p 6 p 9 = ( p 5 − p 6 ) × ( p 9 − p 6 ) = m u l t i p l y ( p 5 , p 9 , p 6 ) < 0 , 夹 角 小 于 180 o , 删 p 6 , 栈 内 p 0 , p 1 , p 3 , p 5
p5p3×p5p9=(p3−p5)×(p9−p5)=multiply(p3,p9,p5)<0,夹角小于180o,删p5,栈内p0,p1,p3 p 5 p 3 × p 5 p 9 = ( p 3 − p 5 ) × ( p 9 − p 5 ) = m u l t i p l y ( p 3 , p 9 , p 5 ) < 0 , 夹 角 小 于 180 o , 删 p 5 , 栈 内 p 0 , p 1 , p 3
p3p1×p3p9=(p1−p3)×(p9−p3)=multiply(p1,p9,p3)<0,夹角大于180o,留p3,栈内p0,p1,p3,p9 p 3 p 1 × p 3 p 9 = ( p 1 − p 3 ) × ( p 9 − p 3 ) = m u l t i p l y ( p 1 , p 9 , p 3 ) < 0 , 夹 角 大 于 180 o , 留 p 3 , 栈 内 p 0 , p 1 , p 3 , p 9
...一直遍历到最后一个点 . . . 一 直 遍 历 到 最 后 一 个 点
规律: 叉乘>0,夹角小于180o,递归向前删点;叉乘<0,夹角大于180o,不删点,加入新点,向后遍历 叉 乘 > 0 , 夹 角 小 于 180 o , 递 归 向 前 删 点 ; 叉 乘 < 0 , 夹 角 大 于 180 o , 不 删 点 , 加 入 新 点 , 向 后 遍 历
注意:(a)上述给非基准点按极角从到大小排号时,有两个及以上点“和基准点连线构成的极角”相等时,这些点的排号挨着但是没有固定顺序,这点并不影响算法给出凸包的准确性。(b)对排号最后的一个点,扫描算法里没有任何删除该点的机制,但是这点也不影响算法给出凸包的准确性。(c)上述程序需要额外加入,判断结束栈内点数小于3和筛选凸包前点数小于3,不能计算多边形面积的情况,可以直接给这种情况赋值0返回。