双缓冲异步日志(Async Logging)
文章目录
- 一、日志系统简介
- 二、功能需求
- 三、性能需求
- 四、高效的异步日志
- 1、异步日志的概念
- 2、双缓冲异步日志解析
- 3、AsyncLogging源码
- 4、代码运行图示
- 五、双缓冲异步日志的相关问题
一、日志系统简介
日志通常用于故障诊断和追踪(trace),也可用于性能分析。日志通常是分布式系统中事故调查时的唯一线索, 用来追寻蛛丝马迹, 查出原凶。
【日志需要记录的内容】:
-
收到每条内部消息的ID(还可以包括关键字段、长度、hash等);
-
收到的每条外部消息的全文;
-
发出每条消息的全文, 每条消息都有全局唯一的id;
-
关键内部状态的变更, 等等。
【一个日志文件可分为前端(frontend)和后端(backend)两部分】:
-
前端提供应用程序使用的接口(API), 并生成日志消息(log message);
-
后端则负责把日志消息写到目的地(destination);
-
典型的多生产者-单消费者问题, 对生产者(前端)而言, 要尽量做到低延迟、低CPU开销、无阻塞;
-
对消费者(后端)而言, 要做到足够大的吞吐量, 并占用较少资源;
二、功能需求
【日志消息格式有几个要点】:
-
尽量每条日志占一行,这样很容易用awk、sed、grep等命令行工具快速联机分析日志;
-
时间戳精确到微妙;
-
始终使用GMT时区(Z);
-
打印线程id,便于分析多线程程序的时序,也可以检测死锁;
-
打印日志级别;
-
打印源文件名和行号。
三、性能需求
【日志库的高效性体现在几个方面】:
-
每秒写上千万条日志的时候没有明显的性能损失;
-
能应对一个进程生产大量日志数据的场景, 例如1GB/min;
-
不阻塞正常的执行流程;
-
在多程序程序中, 不造成争用(contention);
-
磁盘带宽约是110MB/S, 日志库应该能瞬时写满这个带宽(不必持续太久);
-
假如每条日志消息的平均长度是110字节, 这就意味着1秒要写100万条日志。
【muduo日志库实现了几点优化措施】:
-
时间戳字符串中的日期和时间部分是缓存的, 一秒内的多条日志只需要重新格式化微妙部分;
-
日志消息的前4个字段是定长的, 因此可以避免在运行期求字符串长度(不会反复调用strlen),因为编译器认识memcpy()函数, 对于定长的内存复制, 会在编译期把它的inline展开为高效的目标代码;
-
线程id是预先格式化为字符串, 在输出日志消息时只需要简单拷贝几个字节;
-
每行日志消息的源文件名部分采用了编译期计算来获得basename, 避免运行期strrchr()开销。
四、高效的异步日志
1、异步日志的概念
多线程程序对日志库提出了新的需求:线程安全, 即多个程序可以并发写日志, 两个线程的日志消息不会出现交织。
用一个背景线程收集日志消息, 并写入日志文件, 其他业务线程只管往这个日志线程发送日志消息, 这称为异步日志(非阻塞日志)。
2、双缓冲异步日志解析
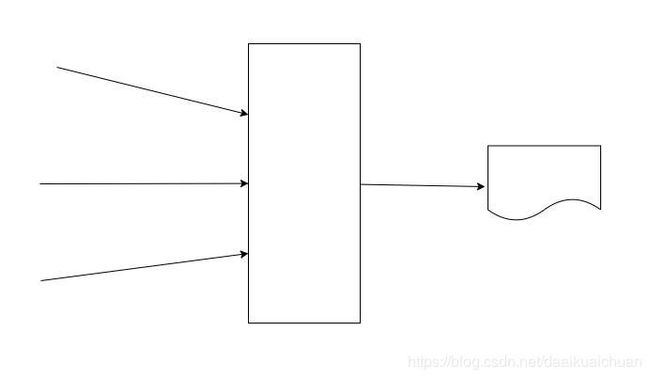
muduo日志库是用双缓冲技术。基本思路是准备两块buffer:A和B, 前端负责往buffer A填数据(日志消息), 后端负责将buffer B的数据写入文件;当buffer A写满之后, 交换A和B, 让后端将buffer A的数据写入文件, 而前端则往buffer B填入新的日志消息, 如此往复。

使用两个buffer的好处是在新建日志消息的时候不必等待磁盘文件操作,也避免每条新日志消息都触发后端日志线程。换句话说,前端不是将一条条日志消息分别送给后端,而是将多条日志消息拼接成一个大的buffer传送给后端,相当于批处理,减少了线程唤醒的开销。
3、AsyncLogging源码
#ifndef MUDUO_BASE_ASYNCLOGGING_H
#define MUDUO_BASE_ASYNCLOGGING_H
#include #include 4、代码运行图示
【第一种情况】:


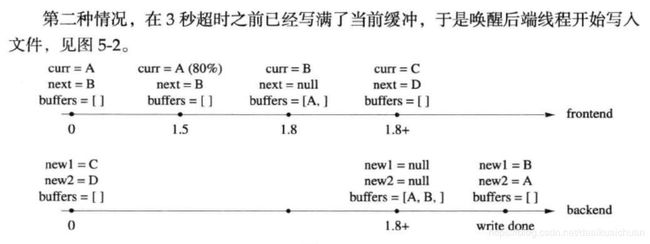
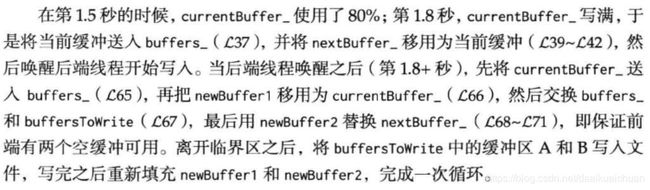
【第二种情况】:
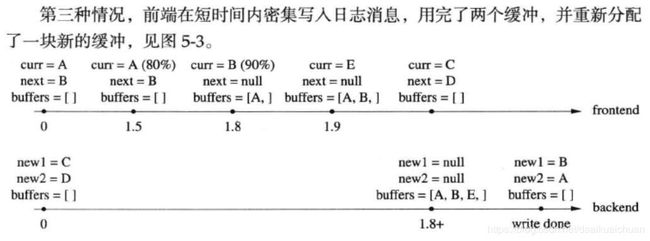
【第三种情况】:


【第四种情况】:
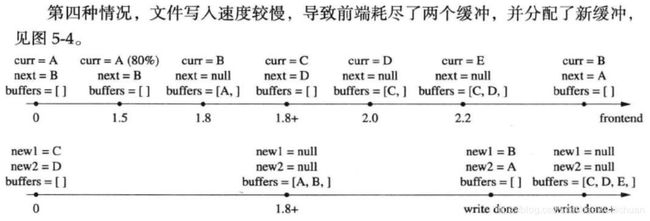
五、双缓冲异步日志的相关问题
-
什么时候切换写到另一个日志文件?前一个buffer已经写满了,则交换两个buffer(写满的buffer置空)。
-
日志串写入过多,日志线程来不及消费,怎么办?直接丢掉多余的日志buffer,腾出内存,防止引起程序故障。
-
什么时候唤醒日志线程从Buffer中取数据?其一是超时,其二是前端写满了一个或者多个buffer。