【Tensorflow】Tensorflow构建VGG实现17种花数据分类
前言
【Tensorflow】Tensorflow构建LeNet实现手写数字识别
前面我们动手构建了LeNet 网络结构,并实现手写数字的识别,本篇和上篇基本类似,我们构建 VGG网络结构来对17中花的数据集进行分类。
本篇代码可见:Github
一、数据的获取
17中花数据分类,是VGG网络初赛时候的数据集,现在网上没有下载;现在唯一一份数据集在tflearn这个框架中默认自带
tflearn安装:pip install tflearn
from tflearn.datasets import oxflower17
# 读取数据
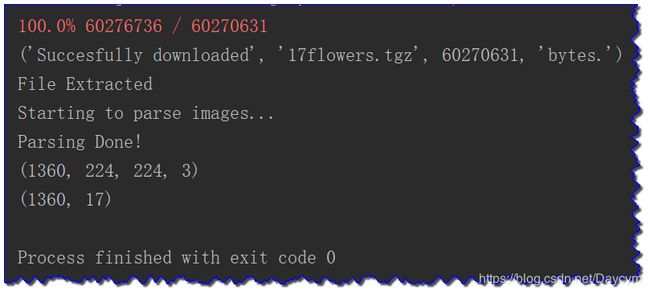
X, Y = oxflower17.load_data(dirname="17flowers", one_hot=True)
print(X.shape) # sample_number,224,224,3
print(Y.shape) # sample_number,17
二、相关参数和超参数的设置
# 相关的参数、超参数的设置
# 学习率,一般学习率设置的比较小
learn_rate = 0.1
# 每次迭代的训练样本数量
batch_size = 32
# 训练迭代次数(每个迭代次数中必须训练完一次所有的数据集)
train_epoch = 10000 # 如果只是想看程序是否可以运行以及可视化结果,可以设置为20
# 样本数量
total_sample_number = X.shape[0]
这里我们使用固定的学习率
三、模型的构建
1、输入输出数据的占位符
# 1. 设置数据输入的占位符
x = tf.placeholder(tf.float32, shape=[None, 224, 224, 3], name='x')
y = tf.placeholder(tf.float32, shape=[None, 17], name='y')
# 返回一个对应的变量,用于对w和b的更新
def get_variable(name, shape=None, dtype=tf.float32, initializer=tf.random_normal_initializer(mean=0, stddev=0.1)):
return tf.get_variable(name, shape, dtype, initializer)
2、VGG网络结构构建
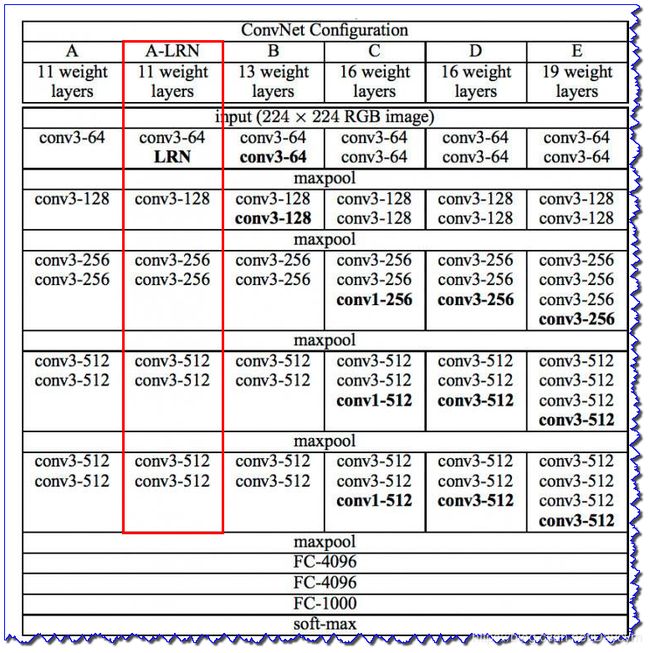
这里我们选择
A-LRN网络结构
# 网络的构建
def vgg_network(x, y):
net1_kernel_size = 8
net3_kernel_size = 16
net5_kernal_size_1 = 32
net5_kernal_size_2 = 32
net7_kernal_size_1 = 64
net7_kernal_size_2 = 64
net9_kernal_size_1 = 64
net9_kernal_size_2 = 64
net11_unit_size = 1000
net12_unit_size = 1000
net13_unit_size = 17
# cov3-64 lrn
with tf.variable_scope('net1'):
net = tf.nn.conv2d(x, filter=get_variable('w', [3, 3, 3, net1_kernel_size]), strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b', [net1_kernel_size]))
net = tf.nn.relu(net)
# lrn(input, depth_radius=5, bias=1, alpha=1, beta=0.5, name=None)
# 做一个局部响应归一化,是对卷积核的输出值做归一化
# depth_radius ==> 对应ppt公式上的n,bias => 对应ppt公式上的k, alpha => 对应ppt公式上的α, beta=>对应ppt公式上的β
net = tf.nn.lrn(net)
# maxpool
with tf.variable_scope('net2'):
net = tf.nn.max_pool(net, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
# conv3-128
with tf.variable_scope('net3'):
net = tf.nn.conv2d(net, filter=get_variable('w', [3, 3, net1_kernel_size, net3_kernel_size]),
strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b', [net3_kernel_size]))
net = tf.nn.relu(net)
# maxpool
with tf.variable_scope('net4'):
net = tf.nn.max_pool(net, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
# conv3-256 conv3-256
with tf.variable_scope('net5'):
net = tf.nn.conv2d(net, filter=get_variable('w1', [3, 3, net3_kernel_size, net5_kernal_size_1]),
strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b1', [net5_kernal_size_1]))
net = tf.nn.relu(net)
net = tf.nn.conv2d(net, filter=get_variable('w2', [3, 3, net5_kernal_size_1, net5_kernal_size_2]),
strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b2', [net5_kernal_size_2]))
net = tf.nn.relu(net)
# maxpool
with tf.variable_scope('net6'):
net = tf.nn.max_pool(net, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
# conv3-512 conv3-512
with tf.variable_scope('net7'):
net = tf.nn.conv2d(net, filter=get_variable('w1', [3, 3, net5_kernal_size_2, net7_kernal_size_1]),
strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b1', [net7_kernal_size_1]))
net = tf.nn.relu(net)
net = tf.nn.conv2d(net, filter=get_variable('w2', [3, 3, net7_kernal_size_1, net7_kernal_size_2]),
strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b2', [net7_kernal_size_2]))
net = tf.nn.relu(net)
# maxpool
with tf.variable_scope('net8'):
net = tf.nn.max_pool(net, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
# conv3-512 conv3-512
with tf.variable_scope('net9'):
net = tf.nn.conv2d(net, filter=get_variable('w1', [3, 3, net7_kernal_size_2, net9_kernal_size_1]),
strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b1', [net9_kernal_size_1]))
net = tf.nn.relu(net)
net = tf.nn.conv2d(net, filter=get_variable('w2', [3, 3, net9_kernal_size_1, net9_kernal_size_2]),
strides=[1, 1, 1, 1],
padding='SAME')
net = tf.nn.bias_add(net, get_variable('b2', [net9_kernal_size_2]))
net = tf.nn.relu(net)
# maxpool
with tf.variable_scope('net10'):
net = tf.nn.max_pool(net, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding='SAME')
# fc
with tf.variable_scope('net11'):
# 将四维的数据转换为两维的数据
shape = net.get_shape()
feature_number = shape[1] * shape[2] * shape[3]
net = tf.reshape(net, shape=[-1, feature_number])
# 全连接
net = tf.add(tf.matmul(net, get_variable('w', [feature_number, net11_unit_size])),
get_variable('b', [net11_unit_size]))
net = tf.nn.relu(net)
# fc
with tf.variable_scope('net12'):
# 全连接
net = tf.add(tf.matmul(net, get_variable('w', [net11_unit_size, net12_unit_size])),
get_variable('b', [net12_unit_size]))
net = tf.nn.relu(net)
# fc
with tf.variable_scope('net13'):
# 全连接
net = tf.add(tf.matmul(net, get_variable('w', [net12_unit_size, net13_unit_size])),
get_variable('b', [net13_unit_size]))
return net
# 获取网络
act = vgg_network(x, y)
# 构建损失函数,优化器,准确率评估
cost = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(labels=y, logits=act)) # 损失函数
# 优化器
# AdamOptimizer通过使用动量(参数的移动平均数)来改善传统梯度下降,促进超参数动态调整。
# 我们可以通过创建标签错误率的摘要标量来跟踪丢失和错误率
# 一个寻找全局最优点的优化算法,引入了二次方梯度校正。
# 相比于基础SGD算法,1.不容易陷于局部优点。2.速度更快
train = tf.train.GradientDescentOptimizer(learning_rate=learn_rate).minimize(cost)
# 正确率
# y [[1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0],[0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0]] ->arg_max(y,1)->[0,1]
# net y [[1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0],[0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0] ]
correct_pred = tf.equal(tf.argmax(y, axis=1), tf.argmax(act, axis=1))
acc = tf.reduce_mean(tf.cast(correct_pred, tf.float32))
四、模型的训练
# 训练
with tf.Session(config=tf.ConfigProto(log_device_placement=True)) as sess:
# 1.初始化所有的变量(一定在变量构建之后调用初始化操作)
tf.global_variables_initializer().run()
# 2.迭代训练
for epoch in range(train_epoch):
# a.计算一次迭代batch执行的次数
# 前面的用于训练,后面的5个批次用于测试
total_batch = int(total_sample_number / batch_size) - 5
# b.迭代更新
for step in range(total_batch):
# 获取当前批次的数据
train_x = X[step * batch_size:step * batch_size + batch_size]
train_y = Y[step * batch_size:step * batch_size + batch_size]
# 模型训练
sess.run(train, feed_dict={x: train_x, y: train_y})
# 每更新10次,输出一下
if step % 10 == 0:
loss, accuracy = sess.run([cost, acc], feed_dict={x: train_x, y: train_y})
print('迭代次数:{}, 步骤:{}, 训练集损失函数:{}, 训练集准确率:{}'.format(epoch, step, loss, accuracy))
# 展示一下
if epoch % 2 == 0:
# 获取测试集数据
test_x = X[step * batch_size:]
test_y = Y[step * batch_size:]
loss, test_acc = sess.run([cost, acc], feed_dict={x: test_x, y: test_y})
print('*' * 100)
print('【测试集】迭代次数:{}, 测试集损失函数值:{},测试集准确率:{}'.format(epoch, loss, test_acc))
# 3.模型保存、持久化
saver = tf.train.Saver()
saver.save(sess, './vgg/model_{}'.format(train_epoch))
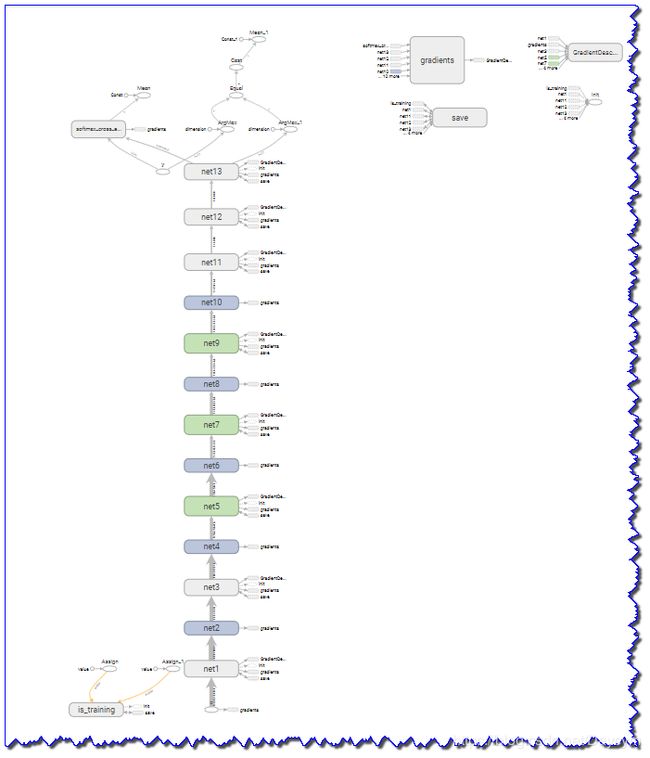
# 模型可视化输出
writer = tf.summary.FileWriter('./vgg/graph', tf.get_default_graph())
writer.close()
print("End!!")
为了显示程序可行,已经最终的可视化结果,这里我只迭代了20次,感兴趣的可以尝试迭代10000次
五、模型可视化结果