robotc 编程挑战 (9)
- 任务简介
- 程序
任务简介
本文为 virtual world challenge pack 中的传感器(SENSORS) 中的
“vacuum”, 如图 1 所示. 要求从起点 A 出发, 当碰到场地一条边时就转向.
要求必须触碰到每条边. 场地的边开始的时候显示为绿色, 当触碰到边时,
边的绿色会消失.
挑战名称为 “vacuum”, 意为吸尘器. 类似家用扫地机器人的循边.
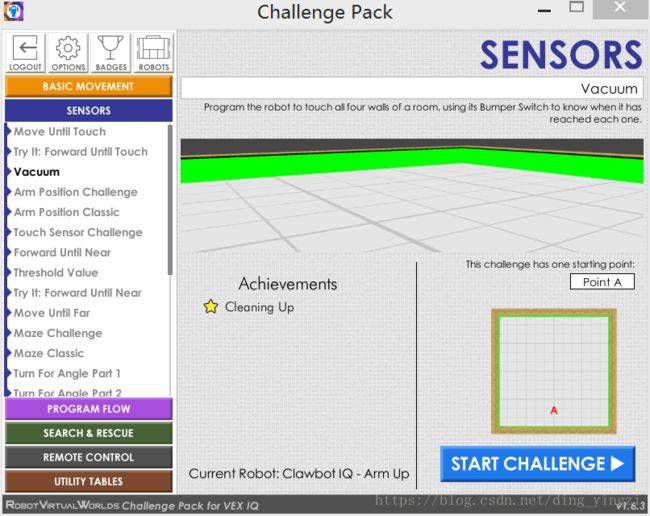
图 1 vacuum 界面图
此挑战使用的 robot 为 “Clawbot IQ-arm up”, 基本配置如图 2 所示.
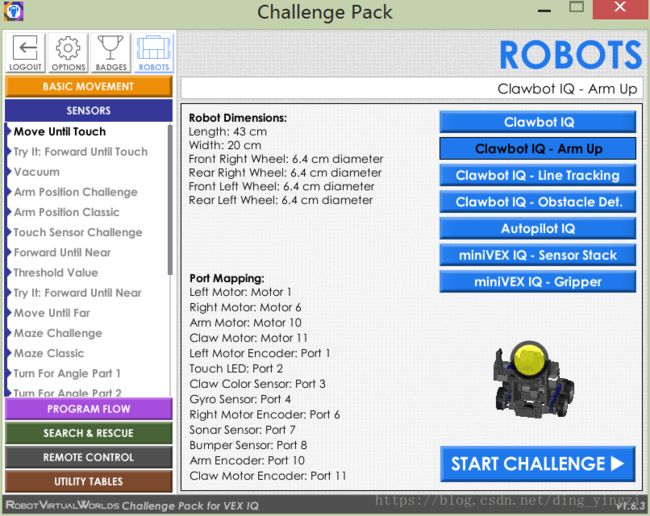
图 2 robot 基本配置
程序
#pragma config(StandardModel, "Clawbot IQ With Sensors")
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
task main()
{
/* */
short touched_count = 0;
const short wall_count = 4;
const float speed = 100;
/* four walls should be touched */
while(touched_count < wall_count){
// starts to go forward
setMotorSpeed(leftMotor, speed);
setMotorSpeed(rightMotor, speed);
// loop untill touched a wall
while(getBumperValue(bumpSwitch) == 1){
++touched_count;
// backward a little
setMotorSpeed(leftMotor, -speed);
setMotorSpeed(rightMotor, -speed);
sleep(300);
// turn left 90 degrees
setMotorSpeed(leftMotor, -speed);
setMotorSpeed(rightMotor, speed);
sleep(470); // when the speed is 100, it is exact 90 degrees
}
}
/* */
stopAllMotors();
}图 3 robot 运行中间截图.

图 3 运行中间截图
运行结果如图 4 所示.
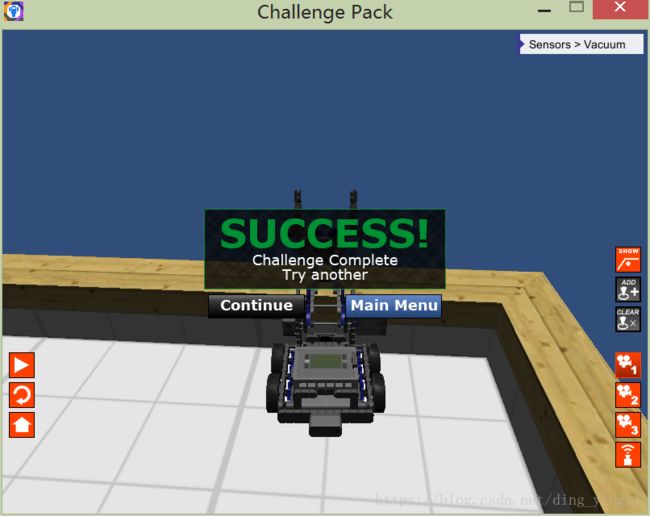
图 4 运行结果