Linux驱动开发01:字符设备、互斥锁、等待队列、定时器和异步通知
介绍
这里是linux驱动最基础部分,我会实现一个不使用任何驱动框架、不包含任何硬件操作的程序来实现一个字符设备驱动(参考宋宝华老师的程序),其中会包含互斥锁、等待队列、定时和异步通知的使用,最后分析它们在内核中到底是如何运作的。
代码和验证
这是一个用内存模拟的字符设备驱动,在初始化时会分配一页的内存给fifo_dev.mem_entry,在写入函数中,在之前内容的末尾添加内容,在读取函数中从这段内存头部读取内容,然后将读取的内容删除并将剩下的内容移动到内存头部。也就是一个模仿FIFO的操作。
#include " );
MODULE_LICENSE("GPL v2");安装该模块后执行:mknod /dev/myfifo c 233 0 创建字符设备文件,主设备号为233, 次设备号为0。
字符设备驱动
1. 字符驱动设备的注册
在fifo_setup_cdev() 函数中包含了字符设备驱动的注册过程。其中主要包含了两个函数:cdev_init() 和 cdev_add(),下面用代码树状图(只包含关键函数调用)来分析这两个函数。
--- linux --- fs --- char_dev.c --- cdev_init( --- INIT_LIST_HEAD(&cdev->list)
| | struct cdev *cdev, |- kobject_init(&cdev->kobj, &ktype_cdev_default)
| | const struct file_operations *fops) |- cdev->ops = fops
| | // 绑定fops到cdev
| |- cdev_add( --- kobj_map(cdev_map, dev, count, NULL, exact_match, exact_lock, p)
| | struct cdev *p,
| | dev_t dev,
| | unsigned count)
|
|- drivers --- base --- map.c --- kobj_map( --- 申请一个probe结构
struct kobj_map *domain, |- 将设备号和cdev封装到probe结构中
dev_t dev, |- 将probe放进cdev_map数组中
unsigned long range,
struct module *module,
kobj_probe_t *probe,
int (*lock)(dev_t, void *),
void *data)树状图中包含了文件节点以及所调用的函数。这里只用记住两件事,第一件事:cdev->ops = fops,第二件事:cdev被封装进了probe结构体中,然后probe又被放进了cdev_map 数组中。cdev_map封装了系统所有的cdev结构和其设备号,在初始化时长度被设定为255,也就是说最多255个字符设备。
2. 打开字符驱动设备
我们知道,当打开一个字符设备的时候会执行file_operation 中的 open() 函数,这里分析该调用是如何实现的。在打开一个字符设备时,会执行chrdev_open()函数,该函数如下所示
--- linux --- fs --- char_dev.c --- chrdev_open( --- p = inode->i_cdev
struct inode *inode, |- if(!p)
struct file *filp) |- kobj=kobj_lookup(cdev_map, inode->i_rdev, &idx)
|- new = container_of(kobj, struct cdev, kobj)
| //inode->i_rdev是设备号, 根据设备号从cdev_map中
| //找出对应的kobj, 然后使用container_of宏得到cdev
|- inode->i_cdev = p = new
| //把cdev放到inode中
|- fops = fops_get(p->ops)
|- replace_fops(filp, fops)
| //从cdev中提取fops, 然后替换file中的fops
- 注意
inode->i_rdev表示设备号, 当执行mknod /dev/(其中c 0 inode。 - 当
inode没有绑定cdev时, 从cdev_map中查找是否有相同设备号的cdev,如果有就将该cdev和inode相绑定,然后替换了file中的fops,之后就可以驱动中写好的open, read, write等函数了。
等待队列
1. 等待队列在内核中的实现
驱动中使用了两个等待队列r_wait 和 w_wait 分别用于读和写。当写的时候,先将本进程添加到等待队列w_wait,然后检查剩余内存是否足够,若不够则将本进程设置为可中断等待状态,然后调度到其他进程;之后如果进行一次读操作,读取完成后会调用wake_up_interruptible() 函数唤醒w_wait 上的所有进程;读操作完成后最终会调度到刚才写的写进程中,程序继续执行,写完成后将本进程从w_wait等待队列中移除。
这整个过程依赖以下几个个函数:
// 1. 初始化等待队列头
init_waitqueue_head(q)
// 2. 用进程tsk初始化一个等待队列元素name
DECLARE_WAITQUEUE(name, tsk)
// 3. 添加等待队列元素wait到等待队列q中
void add_wait_queue(wait_queue_head_t *q, wait_queue_t *wait)
// 4. 设置当前进程为TASK_INTERRUPTIBLE, 然后调度到其他进程
__set_current_state(TASK_INTERRUPTIBLE)
schedule()
// 5. 唤醒一个等待队列
wake_up_interruptible(x)这些函数的调用路线如下:
--- include --- linux --- wait.h --- init_waitqueue_head(q) --- __init_waitqueue_head((q), #q, &__key)
| |- DECLARE_WAITQUEUE --- wait_queue_t name = __WAITQUEUE_INITIALIZER(name, tsk) {
| | | .private = tsk,
| | | .func = default_wake_function,
| | | .task_list = { NULL, NULL }
| | | }
| |- __add_wait_queue() --- list_add(&new->task_list, &head->task_list)
| | //将等待元素添加到等待队列头指向的链表中
| |- wake_up_interruptible(x) --- __wake_up(x, TASK_INTERRUPTIBLE, 1, NULL)
|
|- kernel --- sched --- wait.c --- __init_waitqueue_head() --- spin_lock_init(&q->lock)
| | |- INIT_LIST_HEAD(&q->task_list)
| |- add_wait_queue() --- __add_wait_queue(q, wait)
| |- ___wake_up() --- _wake_up_common(q, mode, nr_exclusive, 0, key)
| |- __wake_up_common() --- list_for_each_entry_safe(curr, next, &q->task_list, task_list){
| | curr->func(curr, mode, wake_flags, key)
| | }//遍历链表, 分别执行唤醒函数
|
|- core.c --- default_wake_function() --- try_to_wake_up(curr->private, mode, wake_flags)
|- try_to_wake_up() --- if (!(p->state & state))
| | goto out;
| |- ttwu_queue()
|- ttwu_queue() --- ttwu_do_activate()
|- ttwu_do_activate() --- ttwu_activate()
| |- ttwu_do_wakeup()
|- ttwu_do_wakeup() --- p->state = TASK_RUNNING//最终将当前任务设置为就绪态
- 初始化时,使用
init_waitqueue_head(&fifo_devp->w_wait)将w_wait中的链表头初始化。 - 添加等待队列时,调用
DECLARE_WAITQUEUE(wait, current)时,将当前进程任务结构体放入的wait中,并将.func = default_wake_function,然后使用add_wait_queue(&dev->w_wait, &wait)将声明的wait插入w_wait链表的尾部 - 休眠时直接调用
__set_current_state(TASK_INTERRUPTIBLE)和schedule()。 - 唤醒时调用
wake_up_interruptible(&dev->w_wait),该函数会在__wake_up_common()函数中遍历w_wait中的链表,然后分别执行等待元素的.func函数指针,也就是default_wake_function()函数,该函数最终会将wait中任务结构体的状态设置为就绪态TASK_RUNNING,之前进入等待的进程就可以在下一次被调度了,从而完成唤醒。
2. 验证等待队列
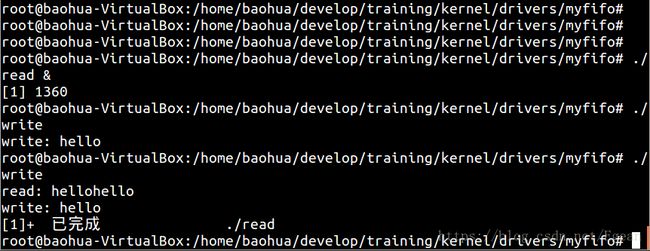
我们写两个简单的程序来验证等待队列。首先是read.c程序,该程序打开/dev/myfifo,然后从中读取10个字节,然后打印出来。
#include 然后是write.c程序,该程序将”hello”写入\dev\myfifo文件中。
#include 先执行./read &将read放入后台运行,由于此时驱动中内存没有内容,因此会该进程会休眠,不会有任何输出内容。再执行.\write,会向内存中写入5个字节,此时虽然唤醒了读进程,但是由于count < left,读进程又会再次休眠;此时再次执行./write,读进程就会读出此时内存中的内容”hellohello”,然后退出。
定时器
定时器的使用很简单,主要包含以下几个函数:
// 初始化定时器
struct timer_list timer;
init_timer(&timer);
// 绑定定时器处理函数和传参
timer.function = &xxx_do_timer;
dev->timer.data = (unsigned long)xxx;
// 设定定时时间,添加定时器
dev->timer.expires = jiffies + HZ;
add_timer(&timer);
// 修改定时时间
mod_timer(&timer, jiffies + HZ);
// 删除定时器
del_timer(&timer);这里不分析它的具体实现,但需要注意的是定时器处理函数xxx_do_timer()被调用时是软中断上下文,是没有进程结构体的,不会进入调度器进行调度,因此如果在xxx_do_timer()执行期间被调度到其他进程,那么将不会返回这里继续执行。
驱动中使用ioctl()来控制定时器,定时器开启后,会不断地将内存中0~9的内容改写,并唤醒读进程,我们写一个ioctl.c来进行测试
#include 首先清空内存,然后初始化并打开定时器,休眠5秒后关闭定时器。我们先执行./read &后台进行读取,然后执行./ioctl可看到读进程被唤醒,并打印出了1234567890。

异步通知
1. 异步通知在内核中的实现
异步通知有点类似于硬件中断的概念,它主要是将程序从阻塞中解放出来。进程先将一个函数和特定的信号绑定,当没有数据时,进程不用阻塞等待,可以继续执行,直到数据到来,此时进程会收到一个特定信号,与之绑定的函数得以执行。驱动中的异步通知是放在定时器中的,主要包含以下两个函数:
// fctnl(fd, F_SETFL, xxx)会映射到本函数
int fasync_helper(int fd, struct file * filp, int on, struct fasync_struct **fapp)
// 向与之绑定的用户进程发送信号
void kill_fasync(struct fasync_struct **fp, int sig, int band)异步通知在内核中的实现与等待队列有相似之处,异步通知的调用路线如下:
--- fs --- fctnl.c --- fasync_helper() --- if (!on)//on即mode参数
| | fasync_remove_entry(filp, fapp);
| | fasync_add_entry(fd, filp, fapp)
|- fasync_add_entry() --- new = fasync_alloc()
| |- fasync_insert_entry(fd, filp, fapp, new))
|- fasync_insert_entry() --- 查找异步通知队列中是否已经指定的异步通知结构
| | 若存在, 直接退出
| |- new->fa_file = filp
| |- new->fa_fd = fd
| |- new->fa_next = *fapp
| | //给新的异步通知结构赋值, 并插入链表
| |- filp->f_flags |= FASYNC
|- kill_fasync() --- kill_fasync_rcu()
|- kill_fasync_rcu() --- 遍历异步通知队列
|- fown = &fa->fa_file->f_owner
| //找到异步通知的owner
|- send_sigio(fown, fa->fa_fd, band)
//向owner发送信号- 在
fasync_helper()函数中, 参数on用来控制是向异步通知队列中添加元素还是移除元素,如果是1,则执行fasync_add_entry(),该函数中声明了一个新的元素new,然后调用fasync_insert_entry()函数将它插入到异步通知队列fapp中,关键的插入过程是new->fa_next = *fapp。 - 在
kill_fasync()函数中,主要是遍历刚才的异步通知队列,获取其中的owner,然后调用send_sigio()向owner发送信号,这个owner就是与该设备文件绑定的进程,这一步在驱动中并没有实现,它是由操作系统来实现的,因此这一步不用太担心。
2. 验证异步通知
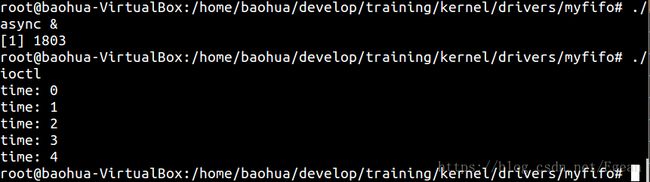
同样,我们写一个async.c程序来验证异步通知。
#include 打开异步通知分三步,其中我们驱动中只实现了第三步,其他都由操作系统实现了。先执行./async & 打开设备文件的异步通知,然后本进程进入休眠状态,此时如果有SIGIO信号产生,就会调用signalio_handler()打印调用次数。然后再执行./ioctl打开定时器,定时器会定时调用kill_fasync()函数发布信号,此时第一个进程就会接收到信号。
总结
使用一个简单的驱动程序实现内核提供的一些基本功能,为加深印象分析了字符设备、等待队列和异步通知的具体实现,写了几个简单的程序进行测试。