书上和网上有很多透视变换的例子,但是其缺点是只讨论一种情况,无法将不同的情况关联起来,因此整理一篇文章,希望可以把透视变换的相关东西都联系起来。
透视变换
透视变换,就是用一个矩阵(透视变换矩阵)将整个场景转换到齐次裁剪空间之中。所谓的齐次裁剪空间,是一个特殊的空间,它的作用就是让渲染管线可以对这个空间中一定范围内的物体保留,超出范围的物体剔除,如果有阶段表面的情况,还要生成新的顶点数据。
齐次裁剪空间通常有两种,两种齐次裁剪空间的x和y坐标范围都是[-1,1],但是z坐标的范围不同,一种是[0,1],一种是[-1,1]。很多书上,网上的教程都会说DX的齐次裁剪空间是[0,1]的那种,而OpenGL的裁剪空间是[-1,1]的那种。不过到底事实是什么样的,我们还得试过之后才知道。
为了在计算机中模拟人眼看东西的状态,我们想出了这样的一个模型:把人眼固定在相机空间的原点,然后从原点定义一个四棱锥,表示人眼可以看到的范围,就像下面这张图一样:

这个四棱锥就被称为视景体。除此之外,对于离眼睛太近的物体我们看不到,太远的物体同样也看不到,所以我们可以选取一定范围内的物体显示出来,这样可以节省渲染时间。那么多近的物体不显示,多远的物体不显示呢?这个没有定论,经常使用n和f表示这两个距离,比n近的物体不显示,比f还远的物体不显示。这两个面就把视景体截断成一个四棱台,这个四棱台里的物体会被绘制,而在外面的不会。
接着,我们就可以来推导这个透视变换矩阵了。此时我们是在相机中间中,并且假设相机空间是一个右手坐标系。
水平视场角
下图是从视景体的上方垂直看下去的图,就像是三视图一样。图中,三角形的顶边就是投影平面。

参数说明:为了计算方便,我们取特殊的投影平面,它的x坐标区间是[-1,1],这个坐标区间刚好可以直接当成齐次裁剪空间的坐标。如图中所示,投影平面距离原点的距离为e,注意这是距离,不是投影平面的z坐标,这个e有时也被称为相机的焦距。这样,左锥面和右锥面形成的夹角为xfov,称为水平视场角。
水平视场角,英文名是horizontal angle of view,但是通常,我们会把视场角和视野混用,视野的英文是field of view,所以我就用xfov(x-axis field of view)来表示水平视场角。
可以看到,距离e满足
再来看看垂直方向上:

垂直方向与水平方向类似,投影平面的纵横比(宽除以高)用aspect表示,这个比值通常是16:9,就是我们显示器的宽高比。所以,投影平面的y坐标范围为[-1/aspect, 1/aspect]。如图中所示,垂直视场角
计算投影后的x坐标

原始的顶点是v,投影之后的顶点是v',根据相似三角形原理,我们可以列出下面的等式:
求解x'得:
接着计算y'的值。

如上图所示,同样使用相似三角形的公式来计算:
于是
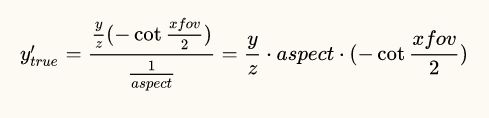
到这里,y'的计算还没有结束,最关键的一步来了!上述的推导成立的前提是,y的投影面是[-1/aspect, 1/aspect],而齐次裁剪空间中,y的取值范围必须是[-1,1],所以,最后一步是,将上述计算出来的y'值除以1/aspect,得出的结果才是齐次裁剪空间中真正的y值:
转换之前的坐标记为(x, y, z, 1),转换之后的坐标就是(x', y', z', 1),将之间计算的结果代入得到转换之后的坐标是

在齐次坐标系统中,点(x, y, z, 1)和点(cx, cy, cz, c)表示的是同一个点,如果这个c不是0的话。利用这个性质,我们可以对上述坐标乘以一个z得到如下的形式

列出转换矩阵表示这个转换过程

转换矩阵中有四个参数没有确定,我们需要把这四个参数解出来。先来思考一下,对z进行投影,这和x,y坐标有没有关系?显然没关系,所以m1和m2的值肯定是0。接下来考虑m3和m4,我们可以列出下面的方程
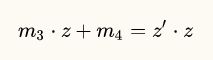
两边除以z得到

接着,我们说过齐次裁剪空间的z坐标范围有两种,一个是[0,1],一个是[-1,1],我们先计算[0,1]。这种转换,近裁剪面(n)转换到0,远裁剪面(f)转换到1,于是我们将坐标代入(注意我们所说的裁剪面n和f是距离)得到方程组

解方程组得到的结果是
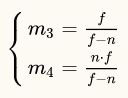
将结果代入到转换矩阵里,我们就能得到最终的转换矩阵:
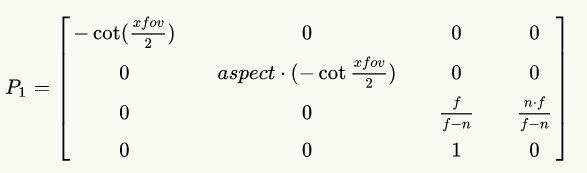
投影矩阵有很多变种,嗯,多到头晕的变种。比如,之前我们为了方便计算,对转换后的坐标值乘以了一个z得到的

显然,我可以不乘z,如果我乘以一个-z得到的结果会是什么呢?

用这个结果去推导投影矩阵,得到的结果是:

很明显,P2 = -P1。这两个矩阵效果都一样吗?事实是, 不一样!P1是一个无效的透视矩阵,P2才是有效的矩阵。这里涉及到裁剪的相关原理。
透视矩阵会把所有的顶点都转换到齐次裁剪空间中,为啥叫齐次裁剪空间?因为在这个空间中,会发生裁剪的操作。为啥是齐次?因为这个空间中的点,w坐标不是1,而是z或者-z。裁剪空间要做的第一件事,就是把w坐标小于0的顶点都剔除。而我们的z坐标,是一个小于0的值!所以,如果你用P1作为透视矩阵,那么你无法看到任何东西,因为它们都被剔除掉了。不信?试试~
推导这么复杂,写成代码就很简单了,只要把结果赋值就好了。
float cFov = 1.f / tanf(xfov / 2);
result.m[0][0] = cFov;
result.m[1][1] = aspect * cFov;
result.m[2][3] = -1;
result.m[2][2] = far / (near - far);
result.m[3][2] = near * far / (near - far);
代码的矩阵是P2矩阵的转置,因为这种数据格式传递给渲染管线的时候计算方便。运行测试场景,得到的结果是:
另一个齐次裁剪空间
之前我们首先的齐次裁剪空间的z范围是[0,1],那么如果它的范围是[-1,1],又会是什么结果呢?下面我们来尝试推导[-1,1]的投影矩阵,这个不难,只有最后转换z坐标的时候有区别,我们以乘以-z为基础来推导。
首先,m1和m2还是0,因为x坐标和y坐标对z投影之后的坐标值没有影响。然后,列出z坐标转换公式:
两边除以-z
现在,我们要把近裁剪面转换成-1,远裁剪面转换成1,列出方程:
求得
最后的转换矩阵是:
再用代码实现:
float cFov = 1.f / tanf(xfov / 2);
result.m[0][0] = cFov;
result.m[1][1] = aspect * cFov;
result.m[2][3] = -1;
result.m[2][2] = (near + far) / (near - far);
result.m[3][2] = (2 * near * far) / (near - far);
应用这个投影矩阵,得到的结果是:

没有半毛钱区别!
上面两张图是OpenGL下运行的结果,下面两张图是D3D12下运行的结果:
可以看到,上面两张图也没啥区别。而对比OpenGL和D3D12的图会发现,OpenGL中显示的物体稍微偏上了一点,为什么会产生这种效果,笔者也不清楚。
如果不用fov,还能用什么参数计算投影矩阵?
在《3D游戏与计算机图形学中的数学方法》一书和《Real Time Rendering 4th Edition》一书中,提供了一种不用fov的方法。这个方法是这样的:
首先确定投影平面的位置,令投影平面正好位于近裁剪面处,它与观察点之间的距离为n,所以其z坐标就是-n。然后,这个投影平面的x范围是[l, r],y范围是[b, t]。先通过相似原理列出一个点(x, y, z, 1)投影到上述投影平面上之后的x,y坐标,令投影后的坐标为(x', y', z', 1):
同理
现在,我们来计算假如投影平面上有一点(x', y'),要将其坐标映射到[-1,1]区间,计算公式是什么样的?
因为投影平面上x坐标取值范围是[l, r],我们可以通过x'到l的距离占(r - l)的比例来映射:
要将这个范围转换到[-1,1],只需要将这个范围翻倍,然后左移一个单位的距离就可以,即:
同理
将x'和y'的式子代入到x''和y''的公式中
转换后的点为
老规矩,乘以-z
列出矩阵
m3和m4的计算和上面一样,我们直接写出结果就行。对[0,1]区间是
对[-1,1]区间是
接着我们用代码来实现这个投影矩阵:
// 注意矩阵要设置成我们推导结果的转置。
void BuildPerspectiveFovRHMatrix(Matrix4f& result, const float l, const float r, float b, float t, const float n, const float f)
{
result.Set(0);
result.m[0][0] = 2 * n / (r - l);
result.m[1][1] = 2 * n / (t - b);
result.m[2][0] = (r + l) / (r - l);
result.m[2][1] = (t + b) / (t - b);
if (g_DepthClipSpace == DepthClipSpace::kDepthClipZeroToOne)
{
result.m[2][2] = f / (n - f);
result.m[3][2] = n * f / (n - f);
}
else /* g_DepthClipSpace == DepthClipSpace::kDepthClipNegativeOneToOne */
{
result.m[2][2] = (n + f) / (n - f);
result.m[3][2] = (2 * n * f) / (n - f);
}
return;
}
(fov)式投影矩阵和(l,r,b,t)式投影矩阵的联系
这两个的关系非常明确,把我们推导fov矩阵时假设的参数代入就行了。l等于-1,r等于1,b等于-1/aspect,t等于1/aspect。代入之后,(l,r,b,t)式矩阵就变成
而这里的n是投影平面到原点的距离,也就是说
于是(l,r,b,t)式矩阵就和(fov)式矩阵画上等号了。如果n = 0.1,那么这个(l,r,b,t)式矩阵的xfov值就是168.58度。来看看运行效果:
OpenGL的显示还是比D3D12偏上一些,整个物体也变小很多,因为我们这次的xfov值太大了。
到这里,我们就可以回答本节最开始的问题了,对DX和OpenGL渲染管线来说,不存在裁剪空间[0,1]还是[-1,1]的区别,而之所以印象中有这区别,是因为在写DX和OpenGL代码时,所用的数学库一个是[0,1],一个是[-1,1]。
如果相机空间是左手坐标系,那怎么办?
从最初的推理开始,左手坐标系改变了什么?投影平面的z坐标改变了,变成了随之而来的x和y坐标的表达式也变了
紧接着,我们不用再乘以-z,列出的矩阵也变了
求解m3和m4的方程也变了
n和f坐标地改变,导致代入方程的数据也变了,先计算z范围是[0,1]的转换矩阵
求得的结果是
最终转换矩阵为
计算z范围是[-1,1]转换矩阵的方程是
解的m3和m4的值为
最终的投影矩阵是
编写代码实现这个投影矩阵
// 还是要注意我们要按照转置的思路去设置
void BuildPerspectiveFovLHMatrix(Matrix4f& result, const float xfov, const float aspect, const float near, const float far)
{
result.Set(0);
float cFov = 1.f / tanf(xfov / 2.f);
result.m[0][0] = cFov;
result.m[1][1] = aspect * cFov;
result.m[2][3] = 1.0f;
if (g_DepthClipSpace == DepthClipSpace::kDepthClipZeroToOne)
{
result.m[2][2] = -far / (near - far);
result.m[3][2] = near * far / (near - far);
}
else
{
result.m[2][2] = -(far + near) / (near - far);
result.m[3][2] = (2 * near * far) / (near - far);
}
return;
}
修改相应的代码查看效果




不用看盒子的显示状况,只需看显示的位置就可以了。因为这个场景是从blender导出的,而blender是右手坐标系的,所以它给出的顶点法线都是以右手坐标系给出的,我在这里做了一些小手脚,把摄像机放在了原点,在它背面放了一个盒子。用了一个左手坐标系的投影矩阵后,后面的盒子就显示出来了。可以看到,位置和右手坐标系及对应的OpenGL和D3D12图片是完全一致的,说明我们的推导没有问题。
那么,不用xfov的投影矩阵怎么办呢?
嗯,懒了,留给读者推导吧。
补充说明
本文用于测试的程序是我在github上的Panda项目。项目的使用方法是:
(1)首先你得有一个环境,Win10+VS2017+CMake+Git+Git-Lfs+github账号
(2)克隆项目到本地(克隆过程请耐心等待,原本github就不快,而且我项目里还有大文件,100M以上的那种),逐个运行build_assimp.bat,build_crossguid.bat,build_libpng.bat,build_opengex.bat,build_zlib.bat
(3)运行build.bat
(4)打开build文件夹下,Panda.sln解决方案。
(5)运行EditorD3D或是EditorOGL。
投影矩阵的生成函数在Numerical.cpp文件中,使用的地方在GraphicsManager.cpp的CalculateCameraMatrix()函数中。模型加载的地方是EditorLogic.cpp的Initialize()函数。上面用到的模型文件是article.dae和article_lefthand.dae,模型文件在根目录/Asset/Scene文件夹中,你可以随意尝试加载文件看效果。如果有什么困难,请在下方留言。
参考资料
《3D游戏与计算机图形学中的数学方法》
《Real-Time Render 4th Edition》
《3D Graphics for Game Programming》