SXF科技笔试题
一.数学、算法题
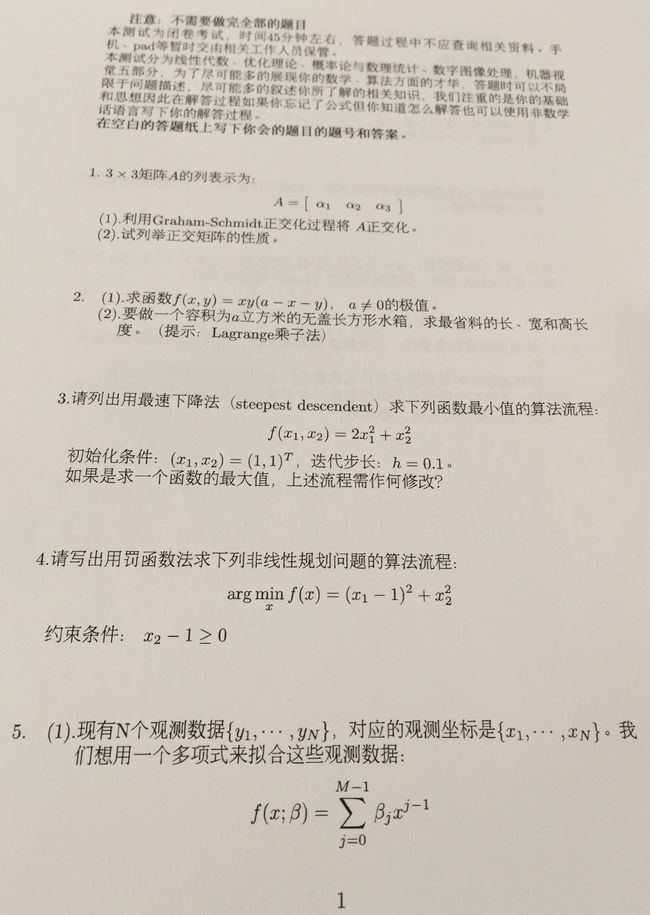
1.施密特正交化的作用:
将空间上一组一般的基(如{1 0 0;1 1 0;1 1 1})转换为一组规范正交基(如{1 0 0;0 1 0;0 0 1})。
(1).
(2).
正交矩阵:方块矩阵,其元素均为实数,而且行与列皆为正交的单位向量,使得该矩阵的转置矩阵为其逆矩阵。( QTQ=I )
参考:wiki 正交矩阵
2.(1)多元函数无条件极值问题。
(2)条件极值,设长宽高xyz。则优化问题可描述为
往下直接使用拉格朗日乘数法即可。
关于条件极值和非条件极值,参考: 第八节 多元函数的极值及其求法
3.最速下降法即梯度下降法。
核心步骤是每一次都向梯度相反的方向移动,具体可参考:百度百科梯度下降。
4.关于罚函数法网上资料好像很少,没搞懂。
参考:百度百科罚函数法
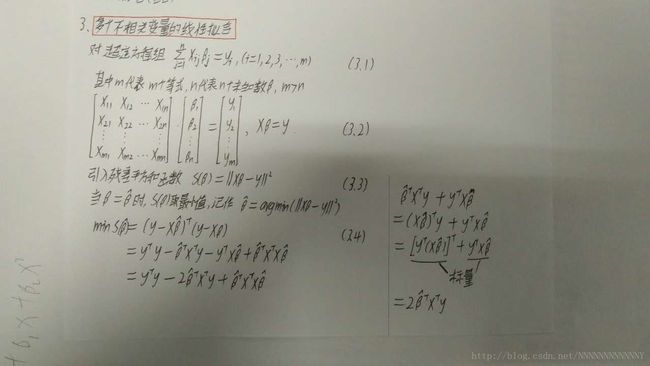
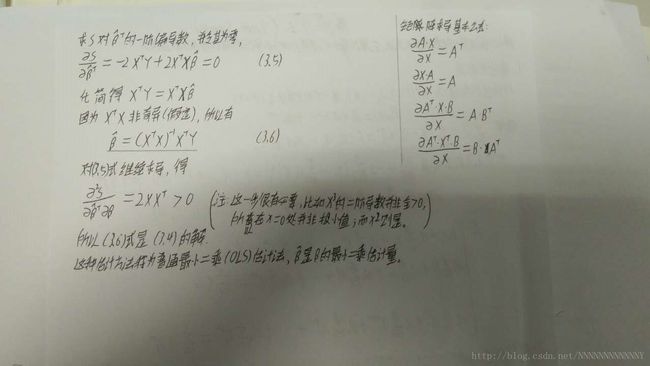
5.最小二乘法:通过最小化误差平方和拟合数据。
(1)这里就是做多项式拟合,不写了,直接上之前的草纸吧。

(2)上述是非线性拟合。线性拟合参数上不含有x高次方项的系数,下面来个线性拟合。

6.常见分类方法:
对数几率回归,决策树,支持向量机,朴素贝叶斯,神经网络。
朴素贝叶斯是基于贝叶斯定理与特征条件独立假设(即用于分类的特征在类确定的条件下都是条件独立的)并使用后验概率最大化策略的分类方法。
不想写了,直接上照片。
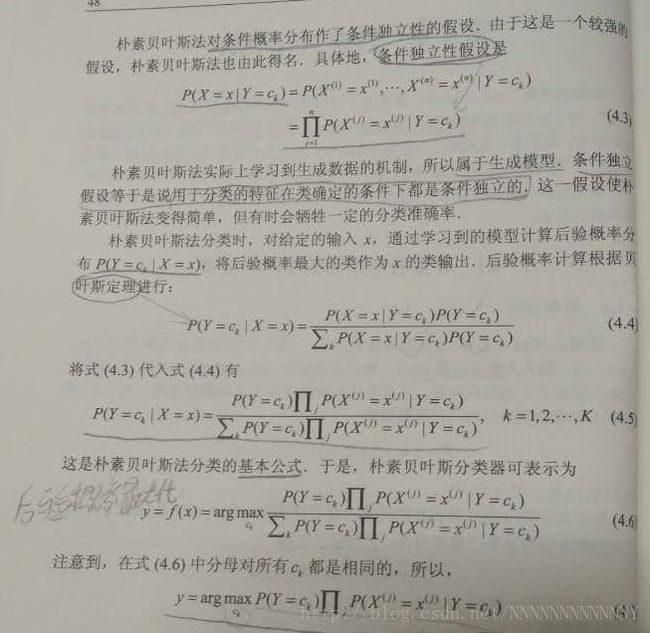
参考:李航的《统计学习方法》4.1节
7.边缘检测:
从基本的梯度算子sobel到LoG、DoG再到比较完善的Canny边缘检测。
特征点检测:比如harris,SIFT、SURF、ORB等吧。
特征区块检测:HOG直方图。
8.K-D树(K-dimension tree),
是对数据点在k维空间(如二维(x,y),三维(x,y,z),k维(x1,y,z..))中划分的一种数据结构,本质上说Kd-树就是一种平衡二叉树。主要应用于多维空间关键数据的搜索(如:范围搜索和最近邻搜索)。
参考:从K近邻算法、距离度量谈到KD树、SIFT+BBF算法
9
(1)滤波是将信号中特定波段频率滤除的操作。图像滤波是在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制。
(2)时域滤波是在空间的图像矩阵上进行卷积运算,一般比较耗时。频域滤波要先进行傅里叶变换,然后和相关的算子进行乘积运算。对于不规则的噪声值,通过傅里叶变换可以得到很好的平滑效果;但相应的,时域在边缘提取上,要比频域处理效果好很多。
(3)频域滤波:首先,将时域信号转换成频域信号。具体参见:频域信号处理
卡尔曼滤波:首先你要建立卡尔曼滤波模型,然后套公式即可。参见:卡尔曼滤波之目标跟踪
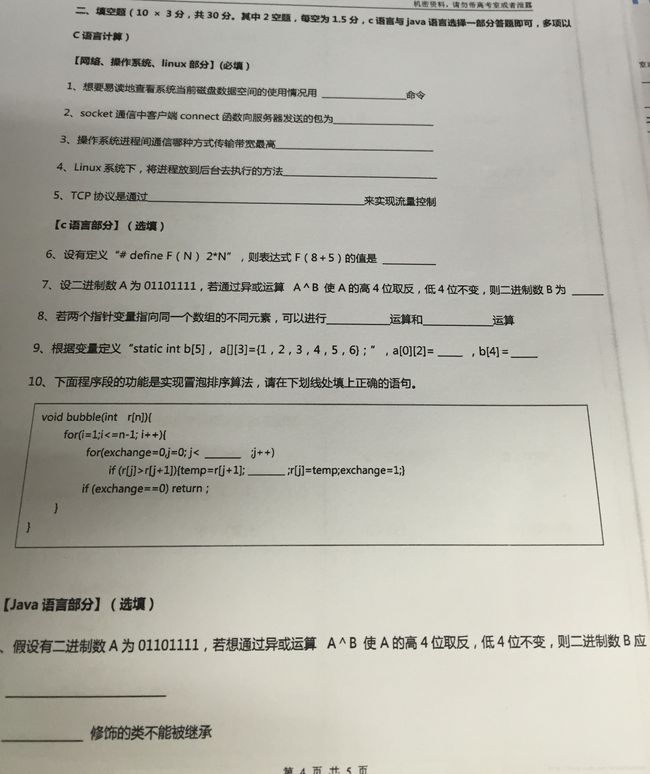
二.填空题
1 . df
参考:Linux 磁盘管理:df,du,fdisk,mkfs,fsck
2 . 连接请求
3 . 共享内存
进程间通信的主要手段:管道(Pipe),信号(Signal),消息队列(Message),共享内存(Shared memory),信号量(semaphore)和套接字(Socket)。
4 . command &
参考:linux命令后台运行
5 . 滑动窗口
参考:TCP协议的滑动窗口具体是怎样控制流量的?
6 . 21
2*8+5
7 .11110000
8 .比较运算和赋值运算
9 . 3;0
10 j

三. 实践题
1.HTTP(HyperText Transfer Protocol,
超文本传输协议)位于OSI模型(Open System Interconnection Reference Model, 开放式系统互联通信参考模型)的传输层。
常用的请求方法有:GET、HEAD、POST、PUT、DELETE、CONNECT、OPTIONS、TRACE、PATCH。
具体参考:HTTP请求方法:GET、HEAD、POST、PUT、DELETE、CONNECT、OPTIONS、TRACE
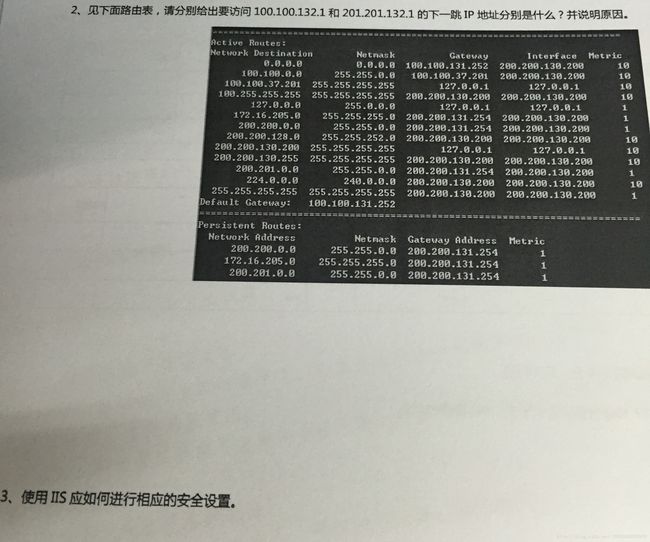
2
3
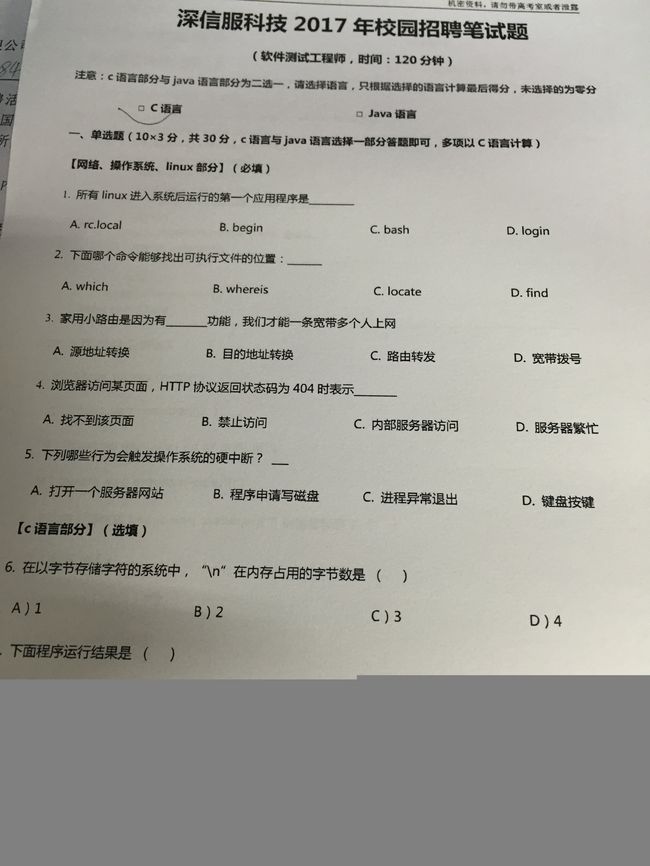
单选题
1.A
2.A
参考:linux下which、whereis、locate、find 命令的区别
3.C
4.A
5.D
6.B
字符串,后边还有一个‘\0’字符。
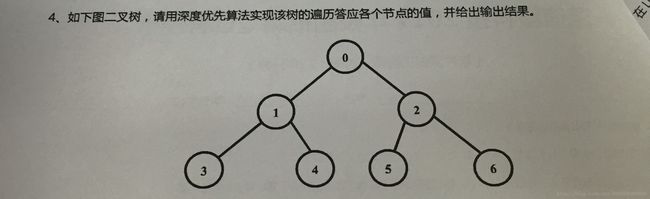
4.深度优先,这里使用前序遍历啦。
int PreOrderTraverse(BinaryTreeNode* root){
if(root==NULL) return 0;
cout << root->m_nValue << ' ';
PreOrderTraverse(root->m_pLeft);
PreOrderTraverse(root->m_pRight)
return 0;
}