【PyTorch学习笔记】19:Batch Normalization
归一化(Normalization)
简述
现在常使用ReLU函数,避免梯度弥散的问题,但是有些场合使用Sigmoid这样的函数效果更好(或者是必须使用),如Sigmoid函数当函数值较大或者较小时,其导数都接近0,这会引起梯度弥散,所以要将输入控制在一个较好的范围内,这样才避免了这种问题。
Batch Normalization就是为了解决这个需求的,当将输出送入Sigmoid这样的激活函数之前,进行一个Normalize的操作,例如将其变换到 N ( 0 , σ 2 ) N(0,\sigma^2) N(0,σ2),即在0的附近,主要在一个小范围内变动。
直观解释
左图是输入的 x x x范围相差较大的情况,这不仅导致了相应权值 w 1 w1 w1和 w 2 w2 w2的变化引起的变化幅度不同,还会使得搜索空间看起来有点"扭曲",如果是像右图一样,从哪个位置开始搜索应该都能更好的找到全局最优。
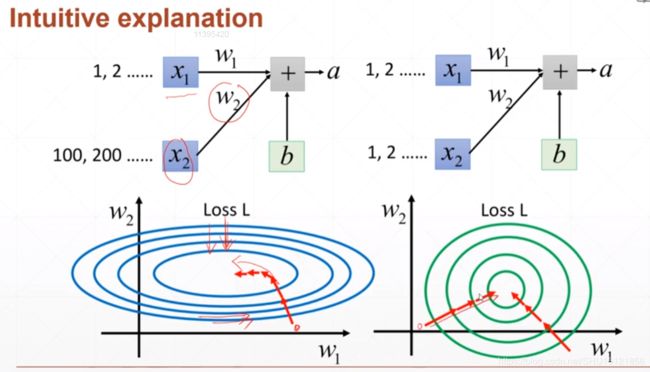
也就是说,这是一个**特征缩放(feature scaling)**的操作。
图像数据是如何做Normalization的
如果是图像数据,例如RGB三个通道的图像数据,其输入的范围是在[0, 1](如果是[0, 255]就直接除以255就变换到[0, 1]了)。刚刚学了如果数据能符合 N ( 0 , σ 2 ) N(0,\sigma^2) N(0,σ2)这样输入进去才是最好的,可以理解成激活函数在0附近的取值对训练最有帮助。例如Sigmoid肯定是使用其0附近的这块,其梯度是最明显的;而ReLU如果只使用正的部分也没有意义了(就和没变换一样)!这里对其进行一个Normalize的操作,也就是各个位置减去均值,然后除以标准差,将其变换到 N ( 0 , 1 ) N(0,1) N(0,1)上。

各种Normalization方式
[1]标准的Batch Normalization
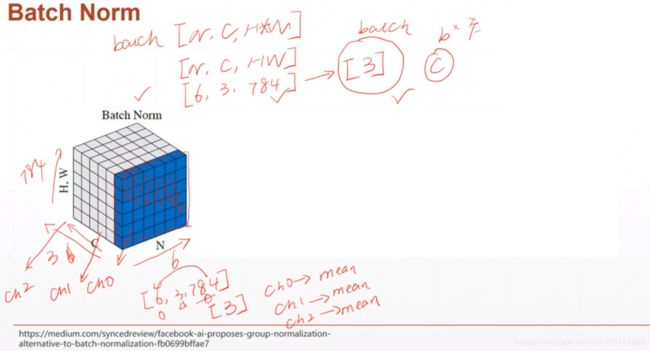
一个Batch的图像数据shape为[样本数N, 通道数C, 高度H, 宽度W],将其最后两个维度flatten,得到的是[N, C, H*W],标准的Batch Normalization就是在通道Channel这个维度上进行移动,对所有样本的所有值求均值和方差,所以有几个通道,得到的就是几个均值和方差。
[2]Layer Normalization
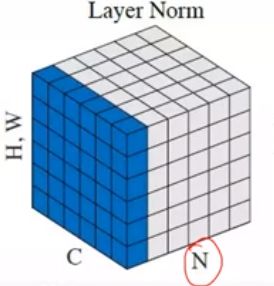
Layer Normalization是在实例即样本N的维度上滑动,对每个样本的所有通道的所有值求均值和方差,所以一个Batch有几个样本实例,得到的就是几个均值和方差。
[3]Instance Normalization
Instance Normalization是在样本N和通道C两个维度上滑动,对Batch中的N个样本里的每个样本n,和C个通道里的每个样本c,其组合[n, c]求对应的所有值的均值和方差,所以得到的是 N ⋅ C N\cdot C N⋅C个均值和方差。

[4]Group Normalization
何恺明提出的归一化方式,老师没讲,见网上资料。
Batch Normalization
简述
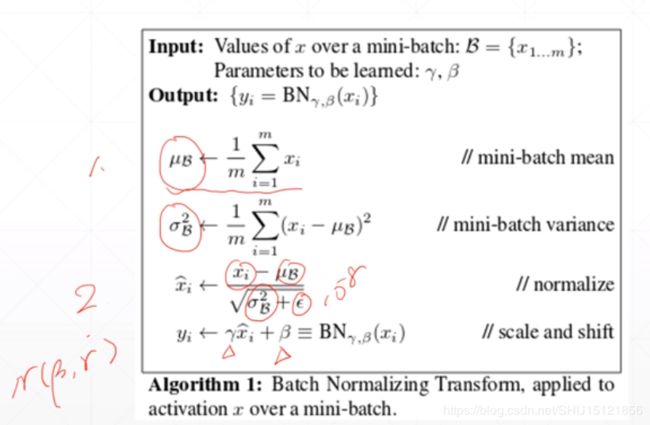
这节课只学了传统的Batch Normalization。如下图输入数据是6张3通道784个像素点的数据,将其分到三个通道上,在每个通道上也就是[6, 784]的数据,然后分别得到和通道数一样多的统计数据均值 μ \mu μ和方差 σ \sigma σ,将每个像素值减去 μ \mu μ除以 σ \sigma σ也就变换到了接近 N ( 0 , 1 ) N(0, 1) N(0,1)的分布,后面又使用参数 β \beta β和 γ \gamma γ将其变换到接近 N ( β , γ ) N(\beta, \gamma) N(β,γ)的分布。

注意, μ \mu μ和 σ \sigma σ只是样本中的统计数据,是没有梯度信息的,不过会保存在运行时参数里。而 γ \gamma γ和 β \beta β属于要训练的参数,他们是有梯度信息的。
PyTorch中的使用
如果要查看网络中一个层上的所有参数,用vars(layer)查看。
1d
import torch
from torch import nn
# 随机生成一个Batch的模拟,100张16通道784像素点的数据
# 均匀分布U(0~1)
x = torch.rand(100, 16, 784)
# Batch Normalization层,因为输入是将高度H和宽度W合成了一个维度,所以这里用1d
layer = nn.BatchNorm1d(16) # 传入通道数
out = layer(x)
# 全局的均值mu
print(layer.running_mean)
# 全局的方差sigma^2
print(layer.running_var)
运行结果:
tensor([0.0500, 0.0498, 0.0499, 0.0501, 0.0500, 0.0502, 0.0500, 0.0500, 0.0500,
0.0500, 0.0499, 0.0501, 0.0500, 0.0499, 0.0499, 0.0502])
tensor([0.9084, 0.9084, 0.9083, 0.9084, 0.9084, 0.9083, 0.9083, 0.9083, 0.9083,
0.9083, 0.9084, 0.9084, 0.9083, 0.9083, 0.9083, 0.9083])
注意layer.running_mean和layer.running_var得到的是全局的均值和方差,不是当前Batch上的,只不过这里只跑了一个Batch而已所以它就是这个Batch上的。现在还没有办法直接查看某个Batch上的这两个统计量的值。
2d
x = torch.randn(1, 16, 7, 7) # 1张16通道的7乘7的图像
# Batch Normalization层,因为输入是有高度H和宽度W的,所以这里用2d
layer = nn.BatchNorm2d(16) # 传入通道数
out = layer(x)
print(out.shape)
print(layer.running_mean) # 全局的均值mu
print(layer.running_var) # 全局的方差sigma^2
print(layer.weight) # weight也就是前面学的公式里的gamma
print(layer.bias) # bias也就是前面学的公式里的beta
运行结果:
torch.Size([1, 16, 7, 7])
tensor([ 0.0187, 0.0125, -0.0032, 0.0032, 0.0034, 0.0031, 0.0231, -0.0024,
0.0002, 0.0194, -0.0097, 0.0177, 0.0324, -0.0013, 0.0128, -0.0086])
tensor([0.9825, 0.9799, 0.9984, 0.9895, 0.9992, 0.9809, 0.9919, 0.9769, 0.9928,
0.9949, 1.0055, 1.0368, 0.9867, 0.9904, 1.0097, 0.9910])
Parameter containing:
tensor([0.5925, 0.5662, 0.1066, 0.0073, 0.9517, 0.0476, 0.0416, 0.2041, 0.8666,
0.6467, 0.7665, 0.0300, 0.9050, 0.8024, 0.2816, 0.1745],
requires_grad=True)
Parameter containing:
tensor([0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
requires_grad=True)
注意这里的layer.weight和layer.bias是当前batch上的。
如果在定义层时使用了参数affine=False,那么就是固定 γ = 1 \gamma=1 γ=1和 β = 0 \beta=0 β=0不自动学习,这时参数layer.weight和layer.bias将是None。
Train和Test时的行为不同
这点类似于Dropout,Batch Normalization在训练和测试时的行为不同。
注意,在定义layer后,看到参数
train=True表示现在在训练模式(默认),train=False表示在测试模式。
要切换为Test模式,需要在定义layer后使用layer.eval()将其转换!而不是直接写参数train=False。因为总要在训练了之后再做测试吧!如果这种参数放到层的定义时去指定,那就没法切换了(因为定义只有一次)。
在训练模式下,如前面所学的会在训练时去计算均值和方差,并且会自动更新 γ \gamma γ和 β \beta β(如果没有关闭自动更新)。在测试时一个样本一个样本进来,归一化所使用的均值和方差都是全局的layer.running_mean和layer.running_var,并且因为不需要训练,不涉及 γ \gamma γ和 β \beta β的更新。
总结
使用了 γ \gamma γ和 β \beta β之后,最后得到的分布是往 N ( β , γ ) N(\beta, \gamma) N(β,γ)上靠的,而不是往 N ( 0 , 1 ) N(0, 1) N(0,1)上靠的。
使用了Batch Normalization让Converge(收敛)的速度加快了,这个可以直观理解,使用了靠近0的部分的Sigmoid激活,其梯度信息更大了。并且能够得到一个更好的解。
提升了Robust(鲁棒性),这使得网络更加稳定,这可以从最前面第一张图所示来直观理解,如果参数有大有小,解空间像左边一样,那么稍微调整学习率可能就发生抖动(如图中左侧椭圆解空间上下方向走,且学习率太大时)或者训练速度太慢(如图中右侧椭圆解空间左右方向走,且学习率太小时)。这让超参数的调整没有那么敏感。