Andrew Ng机器学习笔记(一)
第一篇博客,很有纪念意义,献给让人激动人心的ML,也感谢吴恩达老师的精彩讲解。
我觉得,真正理解一个东西,要能够用通俗易懂的方式将它讲述出来。吴恩达老师的课是这方面的典型代表。
1.机器学习的定义
假设用P来评估计算机程序在某任务类T上的性能,若一个程序通过利用经验E在T中任务上获得了性能改善,则我们就说关于T和P,,改程序对E进行了学习。 —— [ Mitchell,1997 ]
2.机器学习算法分类
- supervised learning :我们教计算机如何做事情
- unsupervised learning:计算机自己学习
- reinforcement learning
- recommender systems
监督学习:对于训练的数据集,标示明确的实际结果(如标明样本的房价,肿瘤的良性与恶性)。可分为:
非监督学习:在非监督式学习中,数据并不被特别标识,学习模型是为了推断出数据的一些内在结构。非监督学习中,数据将会被分为不同的 cluster(簇),称为cluster algorithm。如新闻网页的专题分类。

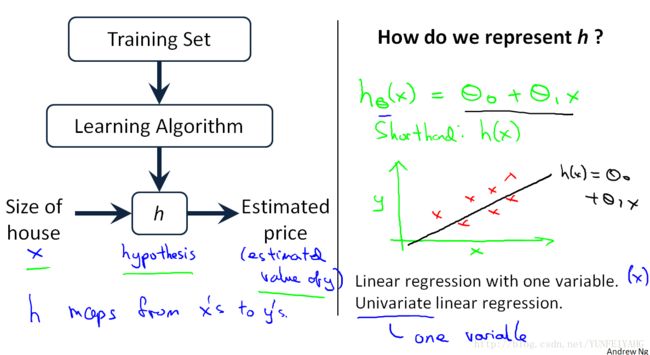
3.单变量线性回归
算法的工作原理如下图。用训练集“喂养”我们的学习算法,形成假设函数 h 。然后,对输入的x值,输出相应的预测值y。相当于是存在一个映射关系: y=f(x)
代价函数:用来选择最合适的曲线。在假设函数 hθ 中,有两个未知量,选择不同的参数值,最终的效果肯定是不一样的,如下图。
那么该如何选择呢?我们的想法是,选择某个 θ0 和 θ1 ,使得对于样本 (x,y) , hθ(x) 最“接近”于 y 。越是“接近”,表明我们的假设函数越是精确。对于“接近”的刻画,让我们给出数学上的标准定义:
在线性回归中,我们要解决的是一个最小化问题。其中的 12 只是为了后面计算的方便。
我们记
这样我们就得到了代价函数(cost function)。此处也称为平方误差函数,当然也有其他的代价函数。但是对于大多数问题,尤其是回归问题,平方误差函数都是一个合理的选择,“其可能是解决回归问题最常用的手段了”。
如此,我们的目标就是要让代价函数最小:
代价函数如何工作:
为了更方便地探究 hθ(x) 与 J(θ0,θ1) 的关系, 先令 θ0 等于0, 得到了简化后的假设函数 hθ(x)=θ1x ,如下图所示。
参数 θ1 是我们要确定的,对于不同的 θ1 ,我们可以画出不同的假设函数曲线,进而算出相应的代价函数值(代价函数取名是很到位的,由于 我们不知道真实具体的函数关系,那么我们所有的假设都会存在一定的偏差,也就是要付出的代价,我们所有做的事情就是要让这个代价变得最小)。代价函数,反应了每一种假设情况下我们要付出的“代价”。反应在图中,如下:
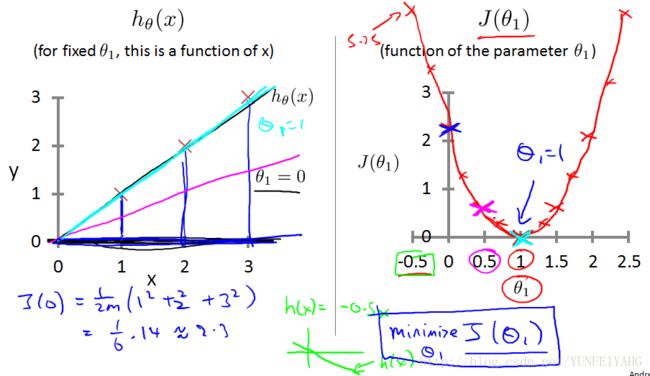
通过观察 J(θ1) 的函数图像,我们可以找到最小值时对应 θ1 值。在本例中, θ1=1 。
代价函数的进一步理解:
现在研究代价函数 J 是如何在最初的线性回归公式中工作。
此时,不再假设 θ0=0 ,存在两个变量 θ0 、 θ1 ,那么代价函数为 J(θ0,θ1) 。而且,我们知道这是一个三维的曲面。回顾上一节单变量情况下代价函数的特点,可知这个三维曲面是“碗型的”,如下:
为了方便讨论,一般将其表示为“等高线图”,以二维的形式予以展现。对于不同的 θ0 和 θ1 ,我们仍然可以计算得出相应的代价函数。越靠近中心,代价函数越小,离我们最终的理想结果越接近。我们可以不断地进行调试,得到不同的数值。那么,有没有比较快速的方法来达到目的呢?这就需要介绍下面的梯度算法了。
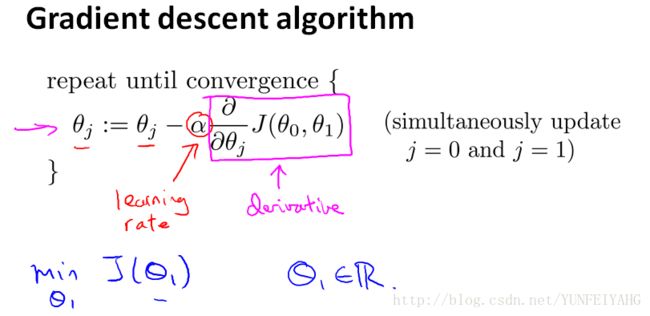
梯度下降算法:
梯度下降算法是一种优化算法, 它可以帮助我们找到一个函数的局部极小值点。
首先要知道方向导数、偏导数与梯度的概念。它们均涉及到函数的变化率,也就是增长的问题。对于高维函数,偏导数只是函数在坐标轴方向的变化率,但是很明显,函数可以有无数个方向(在xy平面内考虑)的变化,也就是方向导数。梯度,则是这所有中函数值增长最快的方向,考虑山丘地形,意味着最陡峭的地方。那么,我们的代价函数目标则是求最小值,只要沿着梯度相反方向,就可以最快到达目的地了。
算法描述:
迭代设计如下。在理解梯度概念的基础上,可以很方便推导出来。 其中 := 表示赋值, α 叫做学习速率,用来控制下降的幅度, ∂∂θjJ(θ0,θ1) 求偏导。这里一定要注意的是,算法每次是同时(simultaneously)改变 θ0 和 θ1 的值
下图介绍梯度下降法是如何工作的。十分像水的流动。
梯度下降算法中学习率和偏导数的理解:
首先看偏导数的影响,为了研究问题的方便,仍然令 θ0 等于0。那么偏导数降维到导数。
无论初始点选择在哪里,偏导数都能指出正确的下降方向。如下图所示:

而对于学习速率来说,取太小则迭代过程会很慢,取过大可能会发散最后。
可以这样说,偏导数决定迭代的方向,学习率则控制着迭代迈开的步子。在学习率取值适当的情况下,梯度下降有“自刹车”的功效。也就是说,越接近最低点时候,由于梯度越来越小,即使学习率保持不变,仍然能保证步子越来越小。这样,我们在迭代过程中,保持学习率为常数值即可。
最终的迭代公式:
将之前的代价函数和我们的梯度下降算法结合起来
那么可以得到如下完整的迭代算法:
给定初始值,按照此步骤即可找到对应最小代价函数时候的 θ0 和 θ1 的值,也即我们最终需要的假设函数。