Redis底层数据结构---hash表
Redis的哈希表—rehash详细讲解
Redis的性能优越,应用普遍,可以存储的键值个数大到上亿条记录,依然保持较高的效率。作为一个内存数据库,Redis内部采用了字典(哈希表)的数据结构实现了键值对的存储。随着数据量的不断增加,数据必然会产生hash碰撞,而Redis采用链地址法解决hash冲突。我们知道如果哈希表数据量达到了一个很大的量级,那么冲突的链的元素数量就会很大,这时查询效率就会变慢,因为取值的时候Redis会遍历链表。而随着数据量的缩减,也会产生一定的内存浪费。Redis在设计时充分考虑了字典的增加和缩减,为了优化数据量增加时的查询效率和缩减时的内存利用率,Redis进行了一系列操作,而处理的这个过程被称作rehash。Redis是在插入新节点之前判断是否需要进行扩容,如果不需要,则直接插入,否则需要先扩容,再插入新节点。
为了避免对服务器性能造成影响,Redis使用了一种渐进式哈希的机制来提高字典的缩放效率。渐进式rehash的好处是它采取分而治之的方式,将rehash键值所需的计算工作均摊到对字典的每个添加、删除、查找和更新操作上,从而避免了集中式rehash带来的庞大计算量。比如:如果哈希表中的数据量达到上百万级别,进行一次rehash会消耗大量的时间,可能导致服务器在一段时间内停止服务。
存储结构
在Redis中,键值对存储方式是由字典(dict)保存的,而字典底层是通过哈希表来实现。通过哈希表中的节点保存字典中的键值对。
hash表的底层数据结构定义:
//字典定义
typedef struct dict{
dictType *type; //type和privdata是针对不同类型的键值对,为创建多态字典而设置的
void *privdata;
dictht ht[2]; //两个hashtable,用于存储和rehash
long rehashidx; //如果没有进行rehash,则值为-1,否则,rehashidx表示rehash进行到的索引位置
unsigning long iterators;
}dict;
//哈希表定义
typedef struct dictht {
dictEntry **table; //指针,指向一个哈希桶bucket
unsigning long size; //哈希表的大小
unsigning long sizemask; //总是size-1,这个值和哈希值一起决定元素应该定位到桶中的什么位置
unsigning long used; //已使用的桶数量
}dictht;
//具体键值对定义
typedef struct dictEntry{
void *key; //键值
union{
void *val; //value值
unint64_tu64;
int64_ts64;
}v;
struct dictEntry *next; //指向下一个键值对的指针,用于解决哈希冲突问题
}dictEntry;
为什么每个字典中包含两个hashtable?
- 首先Redis在正常读写时会用到一个hashtable;
- 另一个hashtable的作用实际上是作为哈希表进行rehash时的一个临时载体。
当需要进行扩容时,redis会根据数据量和桶的个数初始化那个备用的hashtable,来使这个hashtable从容量上满足后续的使用,并开始把之前的hashtable的数据迁移到这个新的hashtable上(重新计算哈希值),等到数据全部迁移完毕,再进行一次HashTable的地址更名,把这个备用的HashTable更名为正式的HashTable,同时清空另一个HashTable,以供下一次rehash的使用。然后将rehashidx赋值为0,打开渐进式rehash标志。同时该值也标志渐进式rehash当前已经进行到哪个hash值。
扩容的条件
负载因子 = 哈希表保存的key的数量 / 哈希表的大小
- 当前哈希表中保存的key的数量超过了哈希表的大小size,并且redis服务当前允许执行rehash(指的是当前没有子进程在执行AOF文件重写或者生成RDB文件《持久化操作》);
- 或者保存的节点数与哈希表的大小的比例超过了安全阈值(默认为5).
即,当以下条件中的任意一个被满足时,程序会自动开始对哈希表执行扩展操作:
- 服务器目前没有在执行BGSAVE命令或者BGREWRITEAPF命令,并且哈希表的负载因子>=1;
- 服务器目前正在执行BGSAVE命令或者BGREWRITEAPF命令,并且哈希表的负载因子>=5;。
如果程序正在进行持久化,这个时候进行rehash会导致数据不一致。
缩容的条件
元素个数低于数组长度的10%.
缩容不会考虑Redis是否正在做bgsave。
渐进式rehash初始化
不管是扩容(包含初始化)还是缩容,最终都是调用dictExpand函数来完成。
这个函数完成的任务:
- 判断:如果当前正在rehash或者传进来的扩容参数<当前哈希表中已使用的元素个数,则返回错误;
- 计算新的hash表大小,使得新的hash表的大小为一个2的n次方:>= size(传进来的参数)的第一个2的n次方;
- 判断:如果扩容后的大小 == 原来表的大小,则返回错误;
- 初始化ht[1],并且将rehashidx的值设置为0,返回正确;
操作辅助rehash(每当客户端请求时,rehash一个槽)
在redis中,每一个增、删、改、查命令中都会判断哈希表是否正在进行扩容,如果是则帮助执行一次,调用_dictRehashStep(dict *d)函数。
此函数仅执行一步hash表的重散列,并且仅当没有安全迭代器绑定到哈希表时。这是因为当我们在重新散列中有迭代器时,我们不能混淆打散两个哈希表的数据,否则某些元素可能被遗漏或者重复遍历。
static void _dictRehashStep(dict *d) {
if (d->iterators == 0) dictRehash(d,1);
}
定时辅助rehash(每次rehash100个槽,但是占用CPU的时间不能超过1ms,超过则直接退出)
虽然redis实现了在读写操作时,服务器辅助进行渐进式rehash操作,但是如果服务器比较空闲,redis数据库将很长时间内都一直使用两个哈希表。所以在redis周期函数中,如果发现有字典正在进行渐进式rehash操作,则会花费1毫秒的时间,帮助一起进行渐进式rehash操作。
/* Rehash for an amount of time between ms milliseconds and ms+1 milliseconds */
int dictRehashMilliseconds(dict *d, int ms) {
long long start = timeInMilliseconds();
int rehashes = 0;
while(dictRehash(d,100)) {
rehashes += 100;
if (timeInMilliseconds()-start > ms) break;
}
return rehashes;
}
渐进式rehash实现
不管是在操作中辅助rehash执行,还是在周期函数中辅助执行,最终都是在调用dictRehash函数:
/* Performs N steps of incremental rehashing. Returns 1 if there are still
* keys to move from the old to the new hash table, otherwise 0 is returned.
*
* Note that a rehashing step consists in moving a bucket (that may have more
* than one key as we use chaining) from the old to the new hash table, however
* since part of the hash table may be composed of empty spaces, it is not
* guaranteed that this function will rehash even a single bucket, since it
* will visit at max N*10 empty buckets in total, otherwise the amount of
* work it does would be unbound and the function may block for a long time. */
int dictRehash(dict *d, int n) {
int empty_visits = n*10; /* Max number of empty buckets to visit. */
if (!dictIsRehashing(d)) return 0;
while(n-- && d->ht[0].used != 0) {
dictEntry *de, *nextde;
/* Note that rehashidx can't overflow as we are sure there are more
* elements because ht[0].used != 0 */
assert(d->ht[0].size > (unsigned long)d->rehashidx);
while(d->ht[0].table[d->rehashidx] == NULL) {
d->rehashidx++;
if (--empty_visits == 0) return 1;
}
de = d->ht[0].table[d->rehashidx];
/* Move all the keys in this bucket from the old to the new hash HT */
while(de) {
uint64_t h;
nextde = de->next;
/* Get the index in the new hash table */
h = dictHashKey(d, de->key) & d->ht[1].sizemask;
de->next = d->ht[1].table[h];
d->ht[1].table[h] = de; //对这个链表中的每个节点,采用头插入法加入到新哈希表的链表中。
d->ht[0].used--;
d->ht[1].used++;
de = nextde;
}
d->ht[0].table[d->rehashidx] = NULL;
d->rehashidx++;
}
/* Check if we already rehashed the whole table... */
if (d->ht[0].used == 0) {
zfree(d->ht[0].table);
d->ht[0] = d->ht[1];
_dictReset(&d->ht[1]);
d->rehashidx = -1;
return 0;
}
/* More to rehash... */
return 1;
}
rehash的步骤
假设ht[0]为正在使用的hashtable,ht[1]为备用的hashtable。
- 为字典的备用哈希表ht[1]分配空间(初始化):
- 如果进行的是扩展操作,那么ht[1]的大小为第一个>= 已使用节点数 * 2的2^n(2的n次方)。
- 如果进行的收缩操作,那么ht[1]的大小为第一个<= 已使用节点数 * 2的2^n(2的n次方)。
- 在字典中维持一个索引计数器变量rehashidx,并将其值设置为0,表示rehash工作正式开始(为-1时表示没有进行rehash);
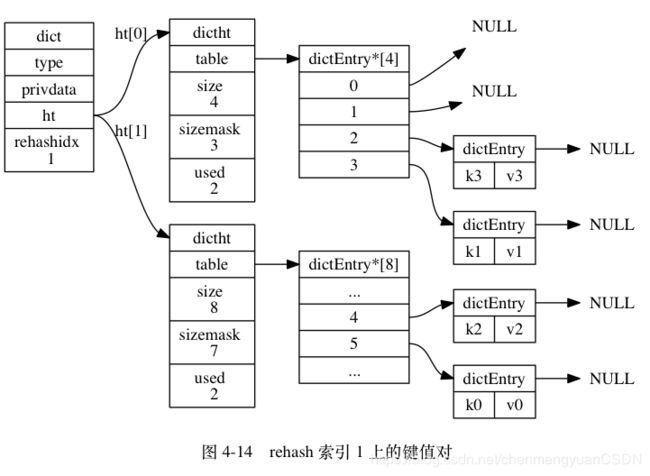
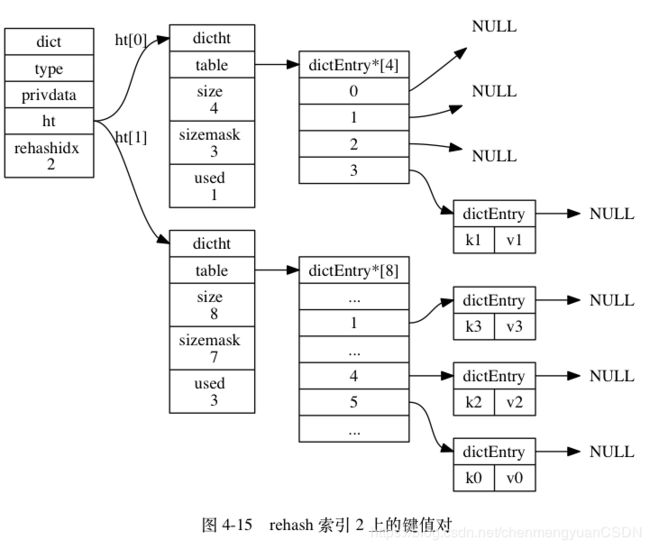
- rehash进行期间,每次对字典进行添加、删除、查找或者更新操作时,程序除了执行指定的操作以外,还会顺带将ht[0]哈希表在rehashidx索引上的所有键值对(这个桶中的链表)rehash到ht[1],当一次rehash工作完成之后,程序将rehashidx属性的值+1。同时Redis会设置一个定时任务,在1ms的时间内,进行rehash处理,每次仅仅处理少量的转移任务。
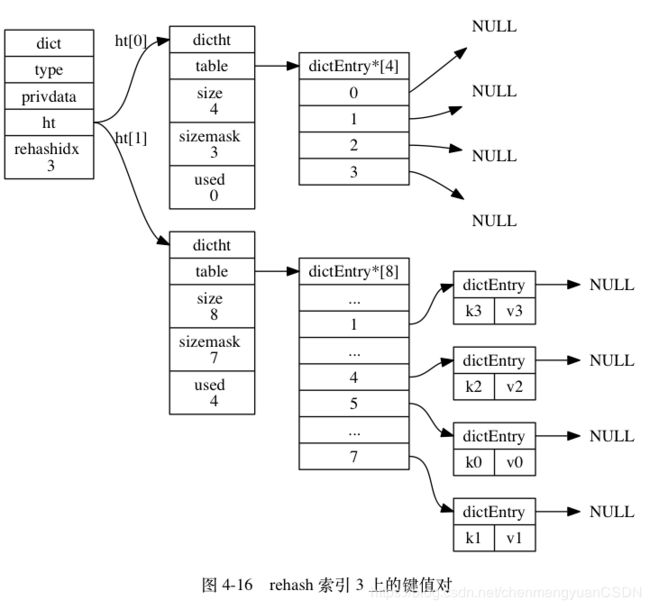
- 随着字典操作的不断执行,最终在某个时间点上,ht[0]的所有键值对都会被rehash到ht[1]上,这时程序将rehashidx属性的值设置为-1,表示rehash操作已经完成。
渐进式rehash执行期间的哈希表操作
因为在rehash的过程中,字典会同时使用两个哈希表,所以在rehash期间,字典的删除、查找、更新、增加等操作会在两个哈希表中进行。比如:
- 要在字典中查找某一个键,程序会现在ht[0]里面进行查找,如果没找到,就会继续到ht[1]里面进行查找。
- 如果是添加操作,则新添加的键值对会一律被保存到ht[1]中,而ht[0]不再进行任何添加操作:这一措施保证ht[0]中的键值对数量只减不增,并且随着操作的执行,最终变成空表。
渐进式rehash带来的问题
渐进式rehash避免了redis阻塞(原来进行一次put操作,要等到rehash全部结束,这个操作才会返回,现在则只需要辅助rehash一步),但是由于在rehash时,需要分配一个新的hash表,在rehash期间,同时有两个hash表在使用,会使得redis内存使用量瞬间突增,在Redis 满容状态下由于Rehash会导致大量Key驱逐。
与HashMap的扩容对比
- HashMap采用的不是渐进式扩容,而是在哈希表插入元素之后,检查哈希表是否需要扩容,如果需要的话,就进行扩容,扩容完成之后,返回;
- HashMap只有一个哈希表,没有备用的;
- HashMap进行扩容的标准是:当表中元素的总数量>哈希表的大小×负载因子(默认0.75)时,对表进行扩容,扩容之后大小为原表大小的2倍;
- HashMap中引入了红黑树,当链表长度大于8时,再判断哈希表的大小是否大于64,如果不大于,则需要扩容,否则,将链表改为红黑树结构,提高查找效率(从O(n)->O(logn));
- HashMap是在加入新节点之后,才判断是否需要扩容;而Redis是在加入节点之前进行判断。