经典人脸识别算法小结——EigenFace, FisherFace & LBPH(下)
该文章由下面两部分组成:
1).经典人脸识别算法小结——EigenFace, FisherFace & LBPH(上),这部分介绍人脸开源库,和图片的读取等准备工作。
2).经典人脸识别算法小结——EigenFace, FisherFace & LBPH(下),这部分介绍三种人脸识别算法。
如果对于opencv中的人脸识别API感兴趣,可参看官方的说明:Face Recognition with OpenCV。
1.EigenFace
EigenFace(特征脸)在人脸识别历史上应该是具有里程碑式意义的,其被认为是第一种有效的人脸识别算法。1987年 Sirovich and Kirby 为了减少人脸图像的表示(降维)采用了PCA(主成分分析)的方法,1991年 Matthew Turk和Alex Pentland首次将PCA应用于人脸识别,即将原始图像投影到特征空间,得到一系列降维图像,取其主元表示人脸,因其主元有人脸的形状,估称为“特征脸”。
EigenFace是一种基于统计特征的方法,将人脸图像视为随机向量,并用统计方法辨别不同人脸特征模式。EigenFace的基本思想是,从统计的观点,寻找人脸图像分布的基本元素,即人脸图像样本集协方差矩阵的特征向量,以此近似的表征人脸图像,这些特征向量称为特脸。
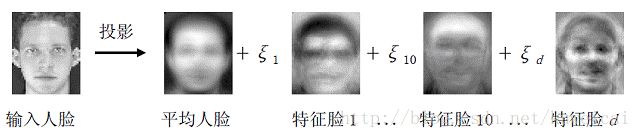
下图对特征脸的应用进行了说明。从下图可以看出,一组特征脸基图像(特征脸1~d)组成一个特征脸子空间,任何一幅人脸图象(减去平均人脸后)都可投影到该子空间,得到一个权值向量(§1~d)。计算此向量和训练集中每个人的权值向量之间的欧式距离,取最小距离所对应的人脸图像的身份作为测试人脸图像的身份。而这里所提到的一组特征脸基图像(也就是特征脸,或者叫特征向量),正是利用PCA所求得的协方差矩阵的特征向量。具体可以参考主成分分析(PCA)和线性判别分析(LDA)原理简介。
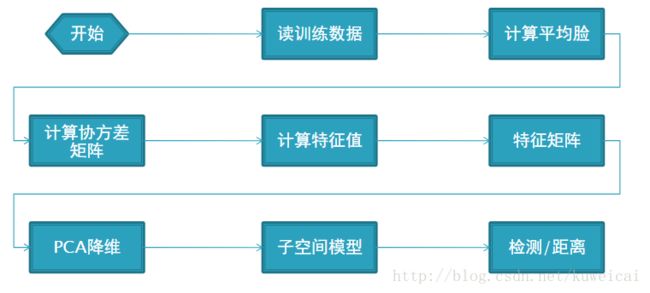
EigenFace的工作流程如下所示,如果想要更具体的介绍可以参考:特征脸
下面代码是基于opencv的API,利用ORL的数据库来训练模型,并对test图像进行识别。为了更好的理解特征脸,下面也对第一幅图像进行了重建。
#include
#include
#include
using namespace std;
using namespace cv;
using namespace cv::face;
int main(void)
{
//读取已经生成好的list.txt文件,关于list.txt文件的
//生成请参考:经典人脸识别算法小结——EigenFace, FisherFace & LBPH(上)
string fileName = string("D:/Opencv Picture/Face/list.txt");
ifstream file(fileName.c_str(), ios::in);
if (!file)
{
cout << "Load file ERR!" << '\n';
return -1;
}
string line, path, classLabel;
vector images;
vector labels;
char separater = ';';
while (getline(file, line))
{
stringstream line_c(line);
getline(line_c, path, separater);
getline(line_c, classLabel);
if (!path.empty() || !classLabel.empty())
{
Mat image = imread(path, 0);//读取灰度图像
images.push_back(image);
labels.push_back(atoi(classLabel.c_str()));
}
}
if (images.size() < 1 || labels.size() < 1)
{
cout << " File Path ERR!" << '\n';
return -1;
}
//将images中的最后一张图像作为test图像
Mat testImg=images[images.size()-1];
int test_label=labels[labels.size()-1];
images.pop_back();
labels.pop_back();
//训练模型
Ptr model = createEigenFaceRecognizer();
//model->train(images, labels);
//model->save("model.xml");
model->load("model.xml");//对于已经训练好并保存的模型,可以直接调用
//对testImg进行识别
int predictLabel = model->predict(testImg);
cout << "The test image label is " << predictLabel << '\n';
//显示meanFace
Mat mean = model->getMean();
Mat meanFace = mean.reshape(1, testImg.rows);
Mat meanFace_norm;
if(meanFace.channels()==1)
normalize(meanFace, meanFace_norm, 0, 255, NORM_MINMAX, CV_8UC1);
else if(meanFace.channels()==3)
normalize(meanFace, meanFace_norm, 0, 255, NORM_MINMAX, CV_8UC3);
imshow("meanFace", meanFace_norm);
//显示前10个eigenFace
Mat eigenVectors = model->getEigenVectors();
for (int i = 0; i < min(10, eigenVectors.cols); ++i)
{
Mat eigenFace,eigenFace_norm;
Mat ev = eigenVectors.col(i).clone();
eigenFace = ev.reshape(1, testImg.rows);
if (eigenFace.channels() == 1)
normalize(eigenFace, eigenFace_norm, 0, 255, NORM_MINMAX, CV_8UC1);
else if (eigenFace.channels() == 3)
normalize(eigenFace, eigenFace_norm, 0, 255, NORM_MINMAX, CV_8UC3);
Mat colorFace;
applyColorMap(eigenFace_norm,colorFace,COLORMAP_RAINBOW);//为了方便观察
imshow("eigenFace "+to_string(i), colorFace);
}
//每隔15个eigenVector重建一副图像
imshow("original", images[0]);
for (int num = min(10, eigenVectors.cols); num < min(300, eigenVectors.cols); num+=15)
{
Mat evs = eigenVectors(Range::all(), Range(0, num));//提取eigenVectors的前num列数据
Mat projection = LDA::subspaceProject(evs, mean, images[0].reshape(1,1));//重建第一幅图像
Mat reconstraction = LDA::subspaceReconstruct(evs, mean, projection);
//显示重建的图像
Mat result = reconstraction.reshape(1, testImg.rows);
Mat result_norm;
if (result.channels() == 1)
normalize(result, result_norm, 0, 255, NORM_MINMAX, CV_8UC1);
else if (result.channels() == 3)
normalize(result, result_norm, 0, 255, NORM_MINMAX, CV_8UC3);
imshow("Rec_face " + to_string(num), result_norm);
}
cvWaitKey(0);
return 0;
} 平均脸及前10个eigenFaces如下所示。

下面是第一幅图像的原图像,original和每隔15个特征向量进行重建后的效果图。很明显随着引入进来的特征向量越来越多,重建后的效果也越来越接近原图。


2. FisherFace
FisherFace 是一种基于LDA(全称Linear Discriminant Analysis, 线性判别分析)的人脸识别算法,而LDA是Ronald Fisher于193年提出来的,所以LDA也被称作是Fisher Discriminant Analysis, 也正因为如此,该人脸识别算法被称为FisherFace。
关于LDA可以参考主成分分析(PCA)和线性判别分析(LDA)原理简介。LDA有和PCA相同的地方是,都有利用特征值排序找到主元的过程,但是不同的是PCA求的是协方差矩阵的特征值,而LDA是求的是一个更为复杂的矩阵的特征值(具体如下)。其中需要注意的是在求均值时,和PCA也是有所不同的,LDA对每个类别样本求均值,而PCA是对所有样本数据求均值,得到平均脸。
LDA的降维步骤如下:
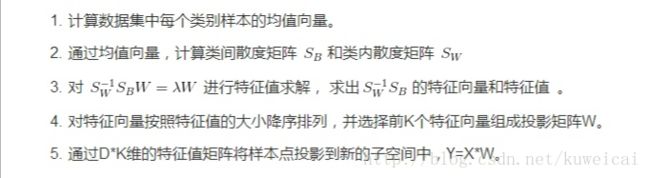
如果用一句话来概括LDA的中心思想就是最大化类间距离,最小化类内距离。
由于LDA利用了类成员信息并抽取了一个特征向量集,该特征向量集强调的是不同人脸的差异而不是照明条件、人脸表情和方向的变化。因此,相比EigenFace(和谁比很重要),采用Fisherface方法对人脸进行识别对光照、人脸姿态的变化更不敏感,有助于提高识别效果。
在opencv中的调用类似于前面的EigenFace。只是得到的eigenvectors的维度不同(从400变为39),另外在重建的时候,由于FisherFace只关注各类目标间的不同特征,所以希望重建出原图像是不现实的。
训练模型:
Ptr model = createFisherFaceRecognizer();
//model->train(images, labels);
//model->save("model.xml");
model->load("model.xml");//对于已经训练好并保存的模型,可以直接调用 图像重建
for (int num =0; num < min(10, eigenVectors.cols); ++num)
{
Mat evs = eigenVectors.col(num);
Mat projection = LDA::subspaceProject(evs, mean, images[0].reshape(1, 1));//重建第一幅图像
Mat reconstraction = LDA::subspaceReconstruct(evs, mean, projection);
//显示重建的图像
Mat result = reconstraction.reshape(1, testImg.rows);
Mat result_norm;
if (result.channels() == 1)
normalize(result, result_norm, 0, 255, NORM_MINMAX, CV_8UC1);
else if (result.channels() == 3)
normalize(result, result_norm, 0, 255, NORM_MINMAX, CV_8UC3);
imshow("Rec_face " + to_string(num), result_norm);
}对于EigenFace 和 FisherFace,这两个方法的性能主要取决于输入数据,如果是左右偏转脑袋,可以容纳15°左右仍然保持较高的识别率,但是上下的偏转相对来说更敏感些。毕竟人脸是三维的,不是简单的旋转就能修复,稍微大一点的偏转最好还是通过3D建模来处理的。如果需要对光照有好的鲁棒性,可以考虑gabor和LBPH。
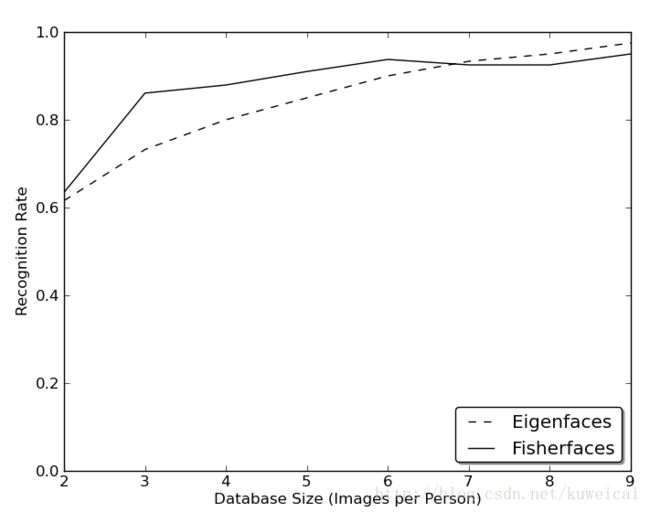
有分析显示,对于EigenFace和FisherFace,要想达到好的识别效果,每个样本对象至少要采集8副左右的图像。
3. LBPH
LBPH是利用局部二值模式直方图的人脸识别算法。关于LBP的原理可以参考:LBP小结:LBP及改进版本的原理和opencv实现源代码。
下面是其计算步骤:
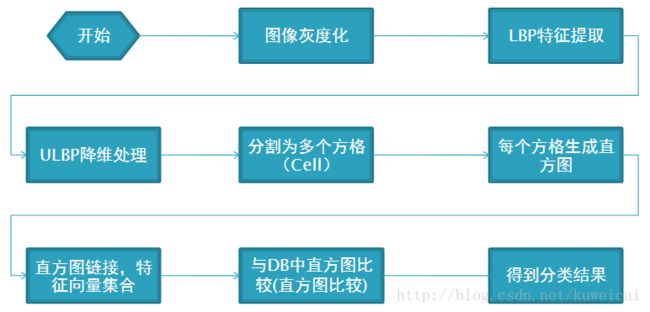
LBP是典型的二值特征描述子,所以相比前面EigenFace和FisherFace,更多的是整数计算,而整数计算的优势是可以通过各种逻辑操作来进行优化,因此效率较高。另外通常光照对图中的物件带来的影响是全局的,也就是说照片中的物体明暗程度,是往同一个方向改变的,可能是变亮或变暗,只是改变的幅度会因为距离光源的远近而有所不同。所以基本上局部相邻(Local)的像素间,受光照影响后数值也许会改变,但相对大小不会改变,因此LBP特征对光照具有比较好的鲁棒性。
LBPH在opencv的API调用如下:
//训练模型
Ptr model = createLBPHFaceRecognizer();
model->train(images, labels);