(转)非极大抑制(Non-Maximum Suppression)
转载自非极大抑制(Non-Maximum Suppression)。
参考文章:
1. Non-Maximum Suppression for Object Detection in Python
2. NMS非极大值抑制
最近在做人脸识别的项目,其中在人脸检测算法中MTCNN算法是用到了NMS算法来筛选候选的人脸区域得到最佳的人脸位置。
这个算法其实应用非常广泛,在比较流行的检测算法中都有使用,包括RCNN、SPP-Net中,因为它主要作用就是在一堆候选区域找到最好最佳的区域。
大概原理如下:
假设从一个图像中得到了2000region proposals,通过在RCNN和SPP-net之后我们会得到2000*4096的一个特征矩阵,然后通过N的SVM来判断每一个region属于N的类的scores。其中,SVM的权重矩阵大小为4096*N,最后得到2000*N的一个score矩阵(其中,N为类别的数量)。
Non-Maximum Suppression就是需要根据
score矩阵和region的坐标信息,从中找到置信度比较高的bounding box。首先,NMS计算出每一个bounding box的面积,然后根据score进行排序,把score最大的bounding box作为队列中。接下来,计算其余bounding box与当前最大score与box的IoU,去除IoU大于设定的阈值的bounding box。然后重复上面的过程,直至候选bounding box为空。最终,检测了bounding box的过程中有两个阈值,一个就是IoU,另一个是在过程之后,从候选的bounding box中剔除score小于阈值的bounding box。需要注意的是:Non-Maximum Suppression一次处理一个类别,如果有N个类别,Non-Maximum Suppression就需要执行N次。
python实现代码如下(参考自Non-Maximum Suppression for Object Detection in Python):
# import the necessary packages
import numpy as np
import cv2
# Felzenszwalb et al.
def non_max_suppression_slow(boxes, overlapThresh):
# if there are no boxes, return an empty list
if len(boxes) == 0:
return []
# initialize the list of picked indexes
pick = []
# grab the coordinates of the bounding boxes
x1 = boxes[:,0]
y1 = boxes[:,1]
x2 = boxes[:,2]
y2 = boxes[:,3]
# compute the area of the bounding boxes and sort the bounding
# boxes by the bottom-right y-coordinate of the bounding box
area = (x2 - x1 + 1) * (y2 - y1 + 1)
idxs = np.argsort(y2)
# keep looping while some indexes still remain in the indexes
# list
while len(idxs) > 0:
# grab the last index in the indexes list, add the index
# value to the list of picked indexes, then initialize
# the suppression list (i.e. indexes that will be deleted)
# using the last index
last = len(idxs) - 1
i = idxs[last]
pick.append(i)
suppress = [last]
# loop over all indexes in the indexes list
for pos in xrange(0, last):
# grab the current index
j = idxs[pos]
# find the largest (x, y) coordinates for the start of
# the bounding box and the smallest (x, y) coordinates
# for the end of the bounding box
xx1 = max(x1[i], x1[j])
yy1 = max(y1[i], y1[j])
xx2 = min(x2[i], x2[j])
yy2 = min(y2[i], y2[j])
# compute the width and height of the bounding box
w = max(0, xx2 - xx1 + 1)
h = max(0, yy2 - yy1 + 1)
# compute the ratio of overlap between the computed
# bounding box and the bounding box in the area list
overlap = float(w * h) / area[j]
# if there is sufficient overlap, suppress the
# current bounding box
if overlap > overlapThresh:
suppress.append(pos)
# delete all indexes from the index list that are in the
# suppression list
idxs = np.delete(idxs, suppress)
# return only the bounding boxes that were picked
return boxes[pick]
# construct a list containing the images that will be examined
# along with their respective bounding boxes
images = [
("images/audrey.jpg", np.array([
(12, 84, 140, 212),
(24, 84, 152, 212),
(36, 84, 164, 212),
(12, 96, 140, 224),
(24, 96, 152, 224),
(24, 108, 152, 236)])),
("images/bksomels.jpg", np.array([
(114, 60, 178, 124),
(120, 60, 184, 124),
(114, 66, 178, 130)])),
("images/gpripe.jpg", np.array([
(12, 30, 76, 94),
(12, 36, 76, 100),
(72, 36, 200, 164),
(84, 48, 212, 176)]))]
# loop over the images
for (imagePath, boundingBoxes) in images:
# load the image and clone it
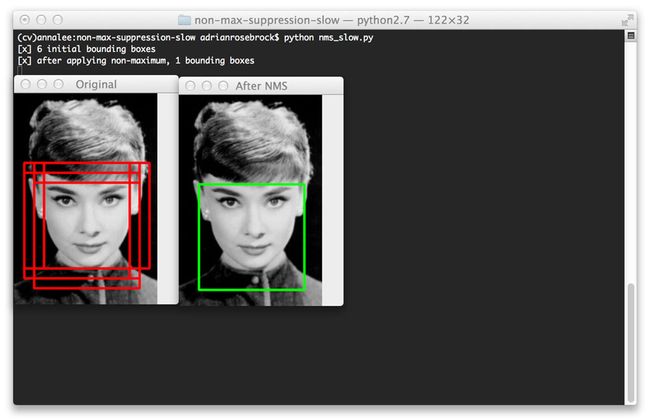
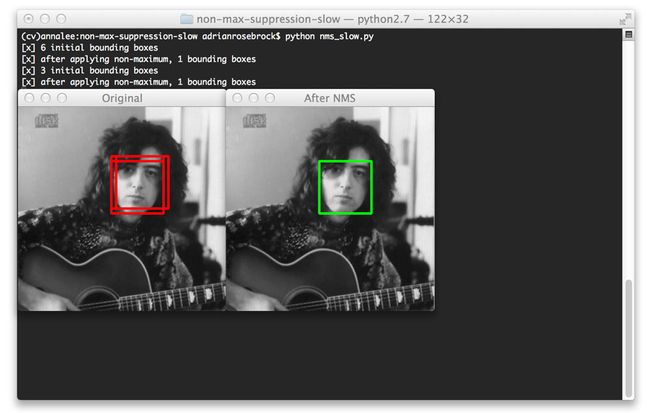
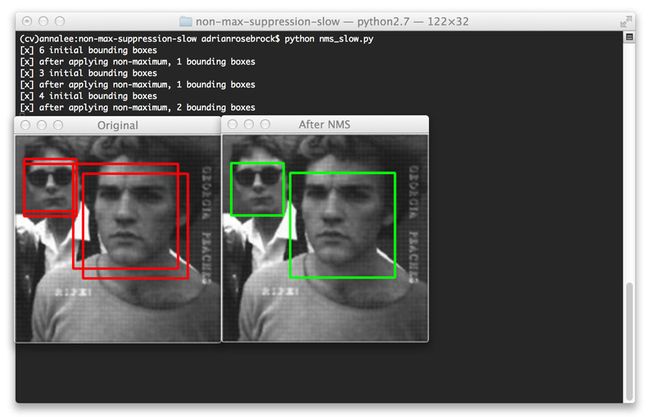
print "[x] %d initial bounding boxes" % (len(boundingBoxes))
image = cv2.imread(imagePath)
orig = image.copy()
# loop over the bounding boxes for each image and draw them
for (startX, startY, endX, endY) in boundingBoxes:
cv2.rectangle(orig, (startX, startY), (endX, endY), (0, 0, 255), 2)
# perform non-maximum suppression on the bounding boxes
pick = non_max_suppression_slow(boundingBoxes, 0.3)
print "[x] after applying non-maximum, %d bounding boxes" % (len(pick))
# loop over the picked bounding boxes and draw them
for (startX, startY, endX, endY) in pick:
cv2.rectangle(image, (startX, startY), (endX, endY), (0, 255, 0), 2)
# display the images
cv2.imshow("Original", orig)
cv2.imshow("After NMS", image)
cv2.waitKey(0)效果如下图: