本篇是自动驾驶系列的第二篇,在后台留言索取代码会提供源码链接。这次的目标是编写一个软件流水线来识别汽车前置摄像头的视频中的车道边界。摄像机标定图像,试验路图像和视频项目都可以在这里储存。
这次试验的目标/步骤如下:
计算相机校准矩阵和给定一组棋盘图像的失真系数。
对原始图像应用畸变校正。
使用颜色变换,渐变等创建阈值二值图像。
应用透视变换来纠正二值图像(“鸟瞰”)。
检测车道像素,找到车道边界。
确定车道和车辆相对于中心的曲率。
将检测到的车道边界转回到原始图像上。
输出车道边界的视觉显示和车道曲率和车辆位置的数值估计。
相机校准矩阵和失真系数
当照相机查看真实世界中的3D对象并将其转换为2D图像时,会发生图像失真; 这个转变并不完美。失真实际上改变了这些3D对象的形状和大小。因此,分析相机图像的第一步是消除这种失真,以便从中获得正确和有用的信息。
真实的相机使用弯曲的镜头来形成图像,而光线在这些镜头的边缘往往会弯曲得太多或太少。这会产生扭曲图像边缘的效果,使线条或物体看起来或多或少比实际弯曲。这被称为径向失真,这是最常见的失真类型。
另一种失真是切向失真。当相机的镜头没有完全平行于相机胶片或传感器所在的成像平面时,会发生这种情况。这使图像看起来倾斜,使一些物体看起来比实际距离或距离更近。
有三个系数需要校正径向失真:k1,k2和k3,以及2对于切向失真:p1,p2。在这个项目中,使用OpenCV和具有9×6角的棋盘面板来执行相机校准。
import os, glob, pickle
import numpy as np
import cv2
import matplotlib.pyplot as plt
classCameraCalibrator:
'''Compute the camera calibration matrix and distortion coefficients given a set of chessboard images.'''
def__init__(self, image_directory, image_filename, binary_filename, nx, ny):
print ('Initializing CameraCalibrator ...')
self.__image_directory = image_directory
self.__image_filename = image_filename
self.__binary_filename = binary_filename
self.__nx = nx# the number of inside corners in x
self.__ny = ny# the number of inside corners in y
self.mtx = None
self.dist = None
self.rvecs = None
self.tvecs = None
self.__calibrated = False
def__calibrate(self):
# Read in and make a list of calibration images
calibration_filenames = glob.glob(self.__image_directory+'/'+self.__image_filename)
# Arrays to store object points and image points from all the images
object_points = []# 3D points in real world space
image_points = []# 2D points in image plane
# Prepare object points, like (0,0,0), (1,0,0), (2,0,0), ...,(7,5,0)
object_p = np.zeros((self.__ny*self.__nx,3),np.float32)
object_p[:,:2] = np.mgrid[0:self.__nx,0:self.__ny].T.reshape(-1,2)# s,y coordinates
# Extract the shape of any image
image = cv2.imread(calibration_filenames[1])
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
shape = gray.shape[::-1]# (width,height)
# Process each calibration image
forimage_filenameincalibration_filenames:
# Read in each image
image = cv2.imread(image_filename)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)# RGB is standard in matlibplot
# Convert to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
# Find the chessboard corners
ret, corners = cv2.findChessboardCorners(gray, (self.__nx,self.__ny), None)
# If found, draw corners
ifret ==True:
# Store the corners found in the current image
object_points.append(object_p)# how it should look like
image_points.append(corners)# how it looks like
# Draw and display the corners
cv2.drawChessboardCorners(image, (self.__nx,self.__ny), corners, ret)
plt.figure()
plt.imshow(image)
plt.show()
# Do the calibration
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(object_points, image_points, shape, None, None)
#print(ret, mtx, dist, rvecs, tvecs)
# Pickle to save time for subsequent runs
binary = {}
binary["mtx"] = mtx
binary["dist"] = dist
binary["rvecs"] = rvecs
binary["tvecs"] = tvecs
pickle.dump(binary, open(self.__image_directory +'/'+self.__binary_filename,"wb"))
self.mtx = mtx
self.dist = dist
self.rvecs = rvecs
self.tvecs = tvecs
self.__calibrated = True
def__load_binary(self):
'''Load previously computed calibration binary data'''
with open(self.__image_directory +'/'+self.__binary_filename, mode='rb') asf:
binary = pickle.load(f)
self.mtx = binary['mtx']
self.dist = binary['dist']
self.rvecs = binary['rvecs']
self.tvecs = binary['tvecs']
self.__calibrated = True
defget_data(self):
'''Getter for the calibration data. At the first call it gerenates it.'''
ifos.path.isfile(self.__image_directory +'/'+self.__binary_filename):
self.__load_binary()
else:
self.__calibrate()
returnself.mtx,self.dist,self.rvecs,self.tvecs
defundistort(self, image):
ifself.__calibrated ==False:
self.get_data()
returncv2.undistort(image,self.mtx,self.dist, None,self.mtx)
deftest_undistort(self, image_filename, plot=False):
'''A method to test the undistort and to plot its result.'''
image = cv2.imread(image_filename)
image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)# RGB is standard in matlibplot
image_undist =self.undistort(image)
# Ploting both images Original and Undistorted
f, (ax1, ax2) = plt.subplots(1,2, figsize=(20,10))
ax1.set_title('Original/Distorted')
ax1.imshow(image)
ax2.set_title('Undistorted')
ax2.imshow(image_undist)
plt.show()
开始准备“对象点”,这将是世界上棋盘角的(x,y,z)坐标。在这里,我假设棋盘固定在z = 0处的(x,y)平面上,使得每个校准图像的目标点是相同的。因此,objp只是一个复制的坐标数组,每当我成功检测到测试图像中的所有棋盘角时,objpoints都会附加一个副本。每个成功的棋盘检测将会在图像平面中的每个角落附加(x,y)像素位置。
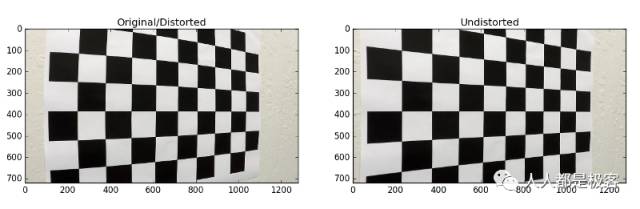
然后,我使用输出对象和imgpoint来使用OpenCV cv2.calibrateCamera()函数来计算相机校准和失真系数。我使用cv2.undistort()函数将此畸变校正应用于测试图像,并获得了以下结果:
该步骤的代码包含在文件“./camera_calibration.py”中。将这一步应用于一个示例图像,你会得到这样的结果:
使用颜色变换,渐变等创建阈值二值图像
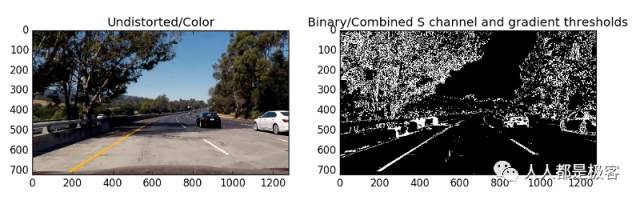
使用颜色和渐变阈值的组合来生成二进制图像,方法compute_binary_image()可以在lane_detection.py中找到。有各种颜色和梯度阈值的组合来生成车道线清晰可见的二值图像。
defcompute_binary_image(self, color_image, plot=False):
# Convert to HLS color space and separate the S channel
#Note:img is the undistorted image
hls = cv2.cvtColor(color_image, cv2.COLOR_RGB2HLS)
s_channel = hls[:,:,2]
# Grayscale image
#NOTE:we already saw that standard grayscaling lost color information for the lane lines
# Explore gradients in other colors spaces / color channels to see what might work better
gray = cv2.cvtColor(color_image, cv2.COLOR_RGB2GRAY)
# Sobel x
sobelx = cv2.Sobel(gray, cv2.CV_64F,1,0)# Take the derivative in x
abs_sobelx = np.absolute(sobelx)# Absolute x derivative to accentuate lines away from horizontal
scaled_sobel = np.uint8(255*abs_sobelx/np.max(abs_sobelx))
# Threshold x gradient
thresh_min =20
thresh_max =100
sxbinary = np.zeros_like(scaled_sobel)
sxbinary[(scaled_sobel >= thresh_min) & (scaled_sobel <= thresh_max)] =1
# Threshold color channel
s_thresh_min =170
s_thresh_max =255
s_binary = np.zeros_like(s_channel)
s_binary[(s_channel >= s_thresh_min) & (s_channel <= s_thresh_max)] =1
# Combine the two binary thresholds
combined_binary = np.zeros_like(sxbinary)
combined_binary[(s_binary ==1) | (sxbinary ==1)] =1
if(plot):
# Ploting both images Original and Binary
f, (ax1, ax2) = plt.subplots(1,2, figsize=(20,10))
ax1.set_title('Undistorted/Color')
ax1.imshow(color_image)
ax2.set_title('Binary/Combined S channel and gradient thresholds')
ax2.imshow(combined_binary, cmap='gray')
plt.show()
returncombined_binary
这是我为这一步输出的一个例子。
应用透视变换来纠正二值图像(“鸟瞰”)
接下来,我们要为透视变换确定四个源点。在这种情况下,我们可以假设道路是平面的。这不是严格的,但它可以作为这个项目的近似值。我们希望从上面俯瞰道路时,选取四个梯形(类似于区域遮挡)的点,这个梯形代表一个矩形。
要做到这一点,最简单的方法是调查车道线是直线的图像,并找到沿线的四个点,在透视变换之后,从鸟瞰视角使线看起来笔直且垂直。
我的透视变换的代码包括2个函数调用compute_perspective_transform()和apply_perspective_transform(),这出现在文件中lane_detection.py。所述compute_perspective_transform()构建的变换矩阵M通过使用apply_perspective_transform()变换的二进制图像。
defcompute_perspective_transform(self, binary_image):
# Define 4 source and 4 destination points = np.float32([[,],[,],[,],[,]])
shape = binary_image.shape[::-1]# (width,height)
w = shape[0]
h = shape[1]
transform_src = np.float32([ [580,450], [160,h], [1150,h], [740,450]])
transform_dst = np.float32([ [0,0], [0,h], [w,h], [w,0]])
M = cv2.getPerspectiveTransform(transform_src, transform_dst)
returnM
defapply_perspective_transform(self, binary_image, M, plot=False):
warped_image = cv2.warpPerspective(binary_image, M, (binary_image.shape[1], binary_image.shape[0]), flags=cv2.INTER_NEAREST)# keep same size as input image
if(plot):
# Ploting both images Binary and Warped
f, (ax1, ax2) = plt.subplots(1,2, figsize=(20,10))
ax1.set_title('Binary/Undistorted and Tresholded')
ax1.imshow(binary_image, cmap='gray')
ax2.set_title('Binary/Undistorted and Warped Image')
ax2.imshow(warped_image, cmap='gray')
plt.show()
returnwarped_image
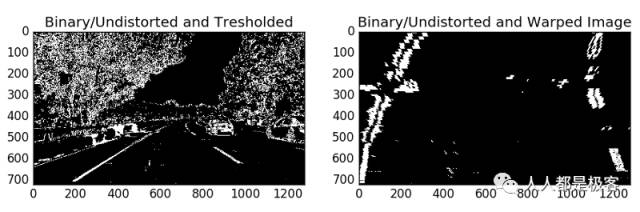
以下面的方式选择硬编码的源和目标点:
transform_src= np.float32([ [580,450], [160,h], [1150,h], [740,450]])
transform_dst= np.float32([ [0,0], [0,h], [w,h], [w,0]])
这两个方法的输出如下所示:
检测车道像素,找到车道边界
现在有一个阈值扭曲的图像,我们准备绘制出车道线!有很多方法可以解决这个问题,但是在直方图中使用峰值效果很好。
在对道路图像进行校准,阈值处理和透视变换之后,我们应该有一个二值图像,车道线清晰可见。但是,我们仍然需要明确地确定哪些像素是线的一部分,哪些属于左边线,哪些属于右边线。
我首先沿着图像下半部分的所有列采用直方图,如下所示:
importnumpyasnp
histogram = np.sum(img[img.shape[0]/2:,:], axis=0)
plt.plot(histogram)
使用这个直方图,我将图像中每列的像素值相加。在我的阈值二进制图像中,像素是0或1,所以这个直方图中最突出的两个峰值将成为车道线底部x坐标的良好指标。我可以用它作为寻找线条的起点。从这一点上,我可以使用一个滑动的窗口,放置在线条中心周围,找到并遵循框架顶部的线条。
defextract_lanes_pixels(self, binary_warped):
# Take a histogram of the bottom half of the image
histogram = np.sum(binary_warped[binary_warped.shape[0]/2:,:], axis=0)
#plt.plot(histogram)
#plt.show()
# Create an output image to draw on and visualize the result
out_img = np.dstack((binary_warped, binary_warped, binary_warped))*255
# Find the peak of the left and right halves of the histogram
# These will be the starting point for the left and right lines
midpoint = np.int(histogram.shape[0]/2)
leftx_base = np.argmax(histogram[:midpoint])
rightx_base = np.argmax(histogram[midpoint:]) + midpoint
# Choose the number of sliding windows
nwindows =9
# Set height of windows
window_height = np.int(binary_warped.shape[0]/nwindows)
# Identify the x and y positions of all nonzero pixels in the image
nonzero = binary_warped.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Current positions to be updated for each window
leftx_current = leftx_base
rightx_current = rightx_base
# Set the width of the windows +/- margin
margin =100
# Set minimum number of pixels found to recenter window
minpix =50
# Create empty lists to receive left and right lane pixel indices
left_lane_inds = []
right_lane_inds = []
# Step through the windows one by one
forwindowinrange(nwindows):
# Identify window boundaries in x and y (and right and left)
win_y_low = binary_warped.shape[0] - (window+1)*window_height
win_y_high = binary_warped.shape[0] - window*window_height
win_xleft_low = leftx_current - margin
win_xleft_high = leftx_current + margin
win_xright_low = rightx_current - margin
win_xright_high = rightx_current + margin
# Draw the windows on the visualization image
cv2.rectangle(out_img,(win_xleft_low,win_y_low),(win_xleft_high,win_y_high),(0,255,0),2)
cv2.rectangle(out_img,(win_xright_low,win_y_low),(win_xright_high,win_y_high),(0,255,0),2)
# Identify the nonzero pixels in x and y within the window
good_left_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) & (nonzerox >= win_xleft_low) & (nonzerox < win_xleft_high)).nonzero()[0]
good_right_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) & (nonzerox >= win_xright_low) & (nonzerox < win_xright_high)).nonzero()[0]
# Append these indices to the lists
left_lane_inds.append(good_left_inds)
right_lane_inds.append(good_right_inds)
# If you found > minpix pixels, recenter next window on their mean position
iflen(good_left_inds) >minpix:
leftx_current = np.int(np.mean(nonzerox[good_left_inds]))
iflen(good_right_inds) >minpix:
rightx_current = np.int(np.mean(nonzerox[good_right_inds]))
# Concatenate the arrays of indices
left_lane_inds = np.concatenate(left_lane_inds)
right_lane_inds = np.concatenate(right_lane_inds)
# Extract left and right line pixel positions
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
returnleftx, lefty, rightx, righty, left_lane_inds, right_lane_inds
defpoly_fit(self, leftx, lefty, rightx, righty, left_lane_inds, right_lane_inds, binary_warped,plot:False):
# Fit a second order polynomial to each
left_fit = np.polyfit(lefty, leftx,2)
right_fit = np.polyfit(righty, rightx,2)
# Generate x and y values for plotting
ploty = np.linspace(0, binary_warped.shape[0]-1, binary_warped.shape[0] )
left_fitx = left_fit[0]*ploty**2+ left_fit[1]*ploty + left_fit[2]
right_fitx = right_fit[0]*ploty**2+ right_fit[1]*ploty + right_fit[2]
# Identify the x and y positions of all nonzero pixels in the image
nonzero = binary_warped.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
out_img = np.dstack((binary_warped, binary_warped, binary_warped))*255
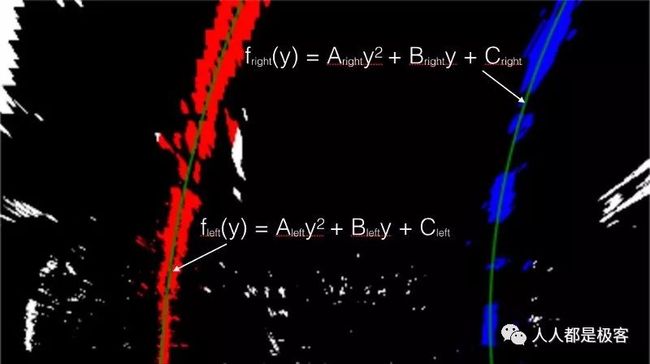
out_img[nonzeroy[left_lane_inds], nonzerox[left_lane_inds]] = [255,0,0]
out_img[nonzeroy[right_lane_inds], nonzerox[right_lane_inds]] = [0,0,255]
if(plot):
plt.imshow(out_img)
plt.plot(left_fitx, ploty, color='yellow')
plt.plot(right_fitx, ploty, color='yellow')
plt.xlim(0,1280)
plt.ylim(720,0)
plt.show()
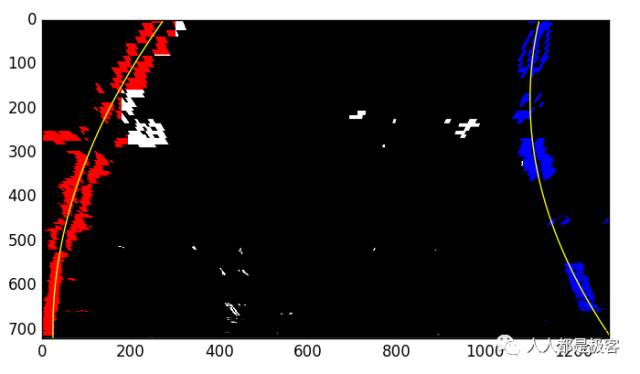
returnleft_fit, right_fit, ploty, left_fitx, right_fitx
输出应该是这样的:
确定车道和车辆相对于中心的曲率
自驾车需要被告知正确的转向角度,左转或右转。如果我们知道汽车的速度和动力以及车道弯曲的程度,我们就可以计算出这个角度。计算车道线曲率的一种方法是将二次多项式拟合到该线上,由此我们可以容易地提取有用的信息。
对于接近垂线的车道线,我们可以用这个公式拟合一条直线:f(y)= Ay ^ 2 + By + C,其中A,B和C是系数。A给出了车道线的曲率,B给出了该线所指向的标题或方向,并且C根据距离图像的最左边多远来给出线的位置(y = 0 )。
执行:
defcompute_curvature(self, left_fit, right_fit, ploty, left_fitx, right_fitx, leftx, lefty, rightx, righty):
# Define conversions in x and y from pixels space to meters
ym_per_pix =30/720# meters per pixel in y dimension
xm_per_pix =3.7/700# meters per pixel in x dimension
y_eval = np.max(ploty)
fit_cr_left = np.polyfit(ploty * ym_per_pix, left_fitx * xm_per_pix,2)
curverad_left = ((1+ (2* left_fit[0] * y_eval /2. + fit_cr_left[1]) **2) **1.5) / np.absolute(2* fit_cr_left[0])
fit_cr_right = np.polyfit(ploty * ym_per_pix, right_fitx * xm_per_pix,2)
curverad_right = ((1+ (2* left_fit[0] * y_eval /2. + fit_cr_right[1]) **2) **1.5) / np.absolute(2* fit_cr_right[0])
return(curverad_left + curverad_right) /2
输出车道边界的视觉显示和车道曲率和车辆位置的数值估计
lane_detection.py中的函数render_curvature_and_offset用于将检测到的车道线返回到原始图像上,并使用填充的多边形绘制检测到的车道。它还绘制了图像或视频帧的左上角和底部的曲率和位置。
所有六个测试图像的结果: