九天揽月带你玩转Ardupilot 的EKF2纸老虎(2)
摘要
本节将继续讲解ardupilot的EKF2代码,希望大家可以一起交流,有错的地方欢迎批评指正!!!
目录
- 摘要
- 目录
- 1.EKF2的状态方程
- 2.新的状态更新方程
- 3.求解协方差矩阵P
- 4.观测方程,求解H,得到观测方程,计算KG,得到估计值,更新P
1.EKF2的状态方程
(1)24维状态矢量

(2)24维状态方程
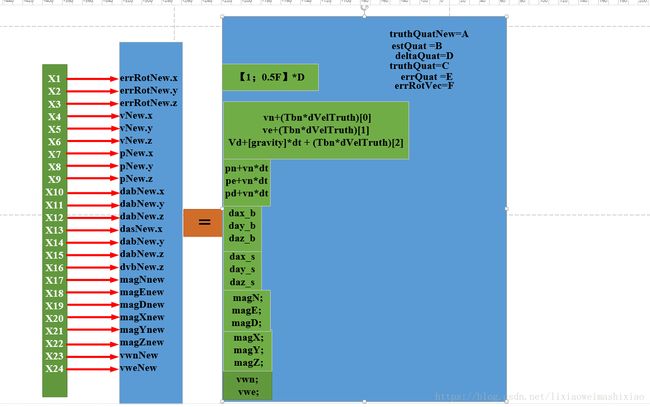
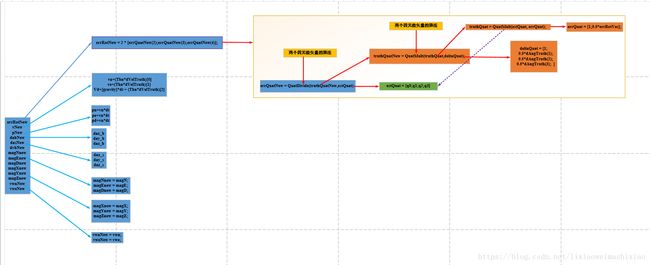
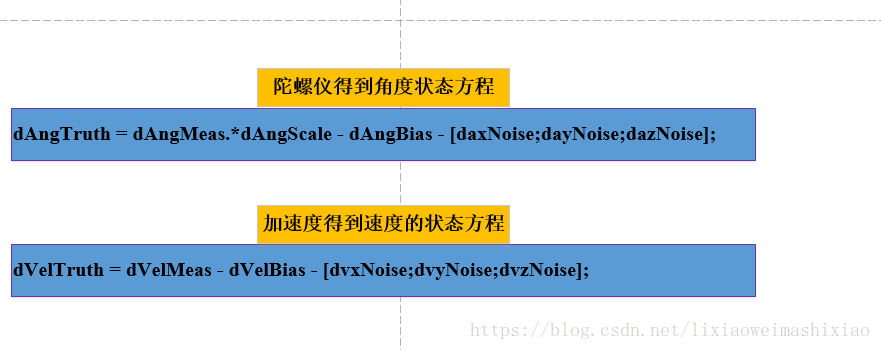
两个重要方程
1.我们首先找到程序中对应的状态方程
void NavEKF2_core::UpdateStrapdownEquationsNED()
{
//update the quaternion states by rotating from the previous attitude through
// the delta angle rotation quaternion and normalise
// apply correction for earth's rotation rate
// % * - and + operators have been overloaded
//通过以前的姿态旋转更新四元数,并归一化应用于修正地球旋转速度矢量,后面运算符进行了重载
stateStruct.quat.rotate(delAngCorrected - prevTnb * earthRateNED*imuDataDelayed.delAngDT); //得到四元数矩阵,考虑地球旋转
stateStruct.quat.normalize(); //进行归一化处理
// transform body delta velocities to delta velocities in the nav frame--速度矢量到导航坐标系
// use the nav frame from previous time step as the delta velocities
// have been rotated into that frame
// * and + operators have been overloaded
Vector3f delVelNav; // delta velocity vector in earth axes
delVelNav = prevTnb.mul_transpose(delVelCorrected);
delVelNav.z += GRAVITY_MSS*imuDataDelayed.delVelDT; //去掉重力影响
//计算机体到导航余弦矩阵----------calculate the body to nav cosine matrix
stateStruct.quat.inverse().rotation_matrix(prevTnb);
//算速度变化率(用于发射探测和其他功能)----- calculate the rate of change of velocity (used for launch detect and other functions)
velDotNED = delVelNav / imuDataDelayed.delVelDT;
//进行低通滤波处理---------apply a first order lowpass filter
velDotNEDfilt = velDotNED * 0.05f + velDotNEDfilt * 0.95f;
// calculate a magnitude of the filtered nav acceleration (required for GPS
// variance estimation)
//计算滤波后的导航加速度的幅度(GPS方差估计会用到这个值)
accNavMag = velDotNEDfilt.length();
accNavMagHoriz = norm(velDotNEDfilt.x , velDotNEDfilt.y); //归一化处理
// if we are not aiding, then limit the horizontal magnitude of acceleration
// to prevent large manoeuvre transients disturbing the attitude
//如果我们不辅助,那么限制加速度的水平大小。防止大机动瞬变干扰姿态
if ((PV_AidingMode == AID_NONE) && (accNavMagHoriz > 5.0f))
{
float gain = 5.0f/accNavMagHoriz;
delVelNav.x *= gain;
delVelNav.y *= gain;
}
//保存速度用于梯形下次积分的位置计算---- save velocity for use in trapezoidal integration for position calcuation
Vector3f lastVelocity = stateStruct.velocity;
//计算速度----sum delta velocities to get velocity
stateStruct.velocity += delVelNav;
//计算位置信息------apply a trapezoidal integration to velocities to calculate position
stateStruct.position += (stateStruct.velocity + lastVelocity) * (imuDataDelayed.delVelDT*0.5f);
//测量到达到达上次复位后的偏置δ角和时间---- accumulate the bias delta angle and time since last reset by an OF measurement arrival
delAngBodyOF += delAngCorrected;
delTimeOF += imuDataDelayed.delAngDT;
//限制状态变量,防止发散--------limit states to protect against divergence
ConstrainStates();
}怎么求解F
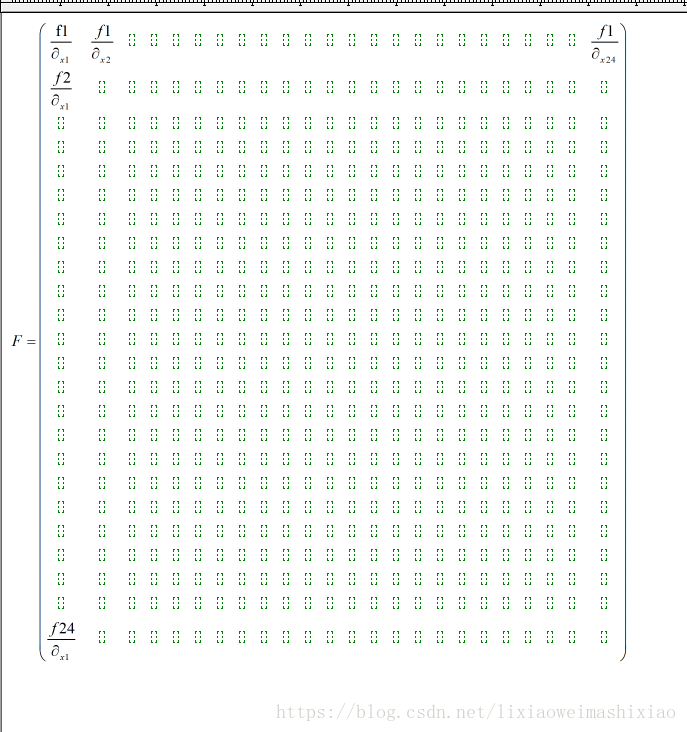
我们看下代码怎么求解的F?这里我们先看仿真代码
在这里看仿真的矩阵F
//float F[24][24];
F[0][0] = 1;
F[0][1] = SF[9];
F[0][2] = SF[11];
F[0][3] = SF[10];
F[0][10] = SF[14];
F[0][11] = SF[15];
F[0][12] = SF[16];
F[1][0] = SF[8];
F[1][1] = 1;
F[1][2] = SF[7];
F[1][3] = SF[11];
F[1][10] = -q0/2;
F[1][11] = SF[16];
F[1][12] = -SF[15];
F[2][0] = SF[6];
F[2][1] = SF[10];
F[2][2] = 1;
F[2][3] = SF[8];
F[2][10] = -SF[16];
F[2][11] = -q0/2;
F[2][12] = SF[14];
F[3][0] = SF[7];
F[3][1] = SF[6];
F[3][2] = SF[9];
F[3][3] = 1;
F[3][10] = SF[15];
F[3][11] = -SF[14];
F[3][12] = -q0/2;
F[4][0] = SF[5];
F[4][1] = SF[3];
F[4][2] = SF[12] + SF[13] - 2*q2*SF[2];
F[4][3] = 2*q1*SF[0] - 2*q0*SF[1] - 2*q3*SF[2];
F[4][4] = 1;
F[4][13] = SF[17] + SF[18] - SF[19] - SF[20];
F[4][14] = 2*q0*q3 - 2*q1*q2;
F[4][15] = - 2*q0*q2 - 2*q1*q3;
F[5][0] = SF[4];
F[5][1] = 2*q2*SF[2] - SF[13] - SF[12];
F[5][2] = SF[3];
F[5][3] = SF[5];
F[5][5] = 1;
F[5][13] = - 2*q0*q3 - 2*q1*q2;
F[5][14] = SF[17] - SF[18] + SF[19] - SF[20];
F[5][15] = 2*q0*q1 - 2*q2*q3;
F[6][0] = SF[12] + SF[13] - 2*q2*SF[2];
F[6][1] = SF[4];
F[6][2] = 2*q3*SF[1] - 2*q2*SF[0] - 2*q0*SF[2];
F[6][3] = SF[3];
F[6][6] = 1;
F[6][13] = 2*q0*q2 - 2*q1*q3;
F[6][14] = - 2*q0*q1 - 2*q2*q3;
F[6][15] = SF[18] - SF[17] + SF[19] - SF[20];
F[7][4] = dt;
F[7][7] = 1;
F[8][5] = dt;
F[8][8] = 1;
F[9][6] = dt;
F[9][9] = 1;
F[10][10] = 1;
F[11][11] = 1;
F[12][12] = 1;
F[13][13] = 1;
F[14][14] = 1;
F[15][15] = 1;
F[16][16] = 1;
F[17][17] = 1;
F[18][18] = 1;
F[19][19] = 1;
F[20][20] = 1;
F[21][21] = 1;
F[22][22] = 1;
F[23][23] = 1;看到这个F中包含SF,这是什么意思呢,经过仔细的研究,可以知道apm的EKF2进行了优化处理,

代码中用到的

float SF[21][1];
SF[0] = dvz - dvz_b;
SF[1] = dvy - dvy_b;
SF[2] = dvx - dvx_b;
SF[3] = 2*q1*SF[2] + 2*q2*SF[1] + 2*q3*SF[0];
SF[4] = 2*q0*SF[1] - 2*q1*SF[0] + 2*q3*SF[2];
SF[5] = 2*q0*SF[2] + 2*q2*SF[0] - 2*q3*SF[1];
SF[6] = day/2 - day_b/2;
SF[7] = daz/2 - daz_b/2;
SF[8] = dax/2 - dax_b/2;
SF[9] = dax_b/2 - dax/2;
SF[10] = daz_b/2 - daz/2;
SF[11] = day_b/2 - day/2;
SF[12] = 2*q1*SF[1];
SF[13] = 2*q0*SF[0];
SF[14] = q1/2;
SF[15] = q2/2;
SF[16] = q3/2;
SF[17] = sq(q3);
SF[18] = sq(q2);
SF[19] = sq(q1);
SF[20] = sq(q0);apm代码中的SF(void NavEKF2_core::CovariancePrediction())
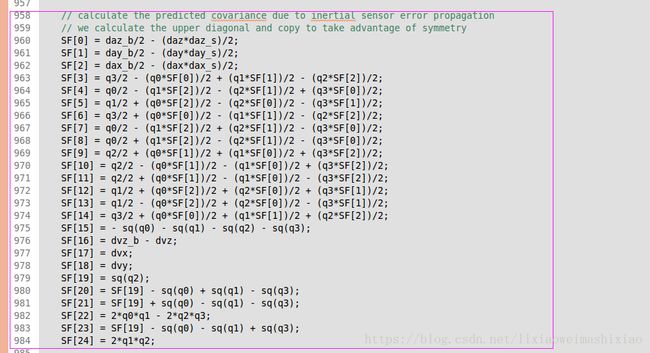
到这里F已经获取到,具体代码,将在第三讲推导,下面就是求取G
求解G

float G[24][6];
G[0][0] = -q1/2;
G[0][1] = -q2/2;
G[0][2] = -q3/2;
G[1][0] = SG[0];
G[1][1] = -q3/2;
G[1][2] = q2/2;
G[2][0] = q3/2;
G[2][1] = SG[0];
G[2][2] = -q1/2;
G[3][0] = -q2/2;
G[3][1] = q1/2;
G[3][2] = SG[0];
G[4][3] = SG[3] - SG[2] - SG[1] + SG[4];
G[4][4] = SG[7] - 2*q0*q3;
G[4][5] = SG[6] + 2*q0*q2;
G[5][3] = SG[7] + 2*q0*q3;
G[5][4] = SG[2] - SG[1] - SG[3] + SG[4];
G[5][5] = SG[5] - 2*q0*q1;
G[6][3] = SG[6] - 2*q0*q2;
G[6][4] = SG[5] + 2*q0*q1;
G[6][5] = SG[1] - SG[2] - SG[3] + SG[4];代码中包含SG,也是优化了
float SG[8][1];
SG[0] = q0/2;
SG[1] = sq(q3);
SG[2] = sq(q2);
SG[3] = sq(q1);
SG[4] = sq(q0);
SG[5] = 2*q2*q3;
SG[6] = 2*q1*q3;
SG[7] = 2*q1*q2;apm代码中

2.新的状态更新方程

3.求解协方差矩阵P
公式:PP = F*P*transpose(F) + Q;
SPP[0] = SF[17]*(2*q0*q1 + 2*q2*q3) + SF[18]*(2*q0*q2 - 2*q1*q3);
SPP[1] = SF[18]*(2*q0*q2 + 2*q1*q3) + SF[16]*(SF[24] - 2*q0*q3);
SPP[2] = 2*q3*SF[8] + 2*q1*SF[11] - 2*q0*SF[14] - 2*q2*SF[13];
SPP[3] = 2*q1*SF[7] + 2*q2*SF[6] - 2*q0*SF[12] - 2*q3*SF[10];
SPP[4] = 2*q0*SF[6] - 2*q3*SF[7] - 2*q1*SF[10] + 2*q2*SF[12];
SPP[5] = 2*q0*SF[8] + 2*q2*SF[11] + 2*q1*SF[13] + 2*q3*SF[14];
SPP[6] = 2*q0*SF[7] + 2*q3*SF[6] + 2*q2*SF[10] + 2*q1*SF[12];
SPP[7] = SF[18]*SF[20] - SF[16]*(2*q0*q1 + 2*q2*q3);
SPP[8] = 2*q1*SF[3] - 2*q2*SF[4] - 2*q3*SF[5] + 2*q0*SF[9];
SPP[9] = 2*q0*SF[5] - 2*q1*SF[4] - 2*q2*SF[3] + 2*q3*SF[9];
SPP[10] = SF[17]*SF[20] + SF[16]*(2*q0*q2 - 2*q1*q3);
SPP[11] = SF[17]*SF[21] - SF[18]*(SF[24] + 2*q0*q3);
SPP[12] = SF[17]*SF[22] - SF[16]*(SF[24] + 2*q0*q3);
SPP[13] = 2*q0*SF[4] + 2*q1*SF[5] + 2*q3*SF[3] + 2*q2*SF[9];
SPP[14] = 2*q2*SF[8] - 2*q0*SF[11] - 2*q1*SF[14] + 2*q3*SF[13];
SPP[15] = SF[18]*SF[23] + SF[17]*(SF[24] - 2*q0*q3);
SPP[16] = daz*SF[19] + daz*sq(q0) + daz*sq(q1) + daz*sq(q3);
SPP[17] = day*SF[19] + day*sq(q0) + day*sq(q1) + day*sq(q3);
SPP[18] = dax*SF[19] + dax*sq(q0) + dax*sq(q1) + dax*sq(q3);
SPP[19] = SF[16]*SF[23] - SF[17]*(2*q0*q2 + 2*q1*q3);
SPP[20] = SF[16]*SF[21] - SF[18]*SF[22];
SPP[21] = 2*q0*q2 + 2*q1*q3;
SPP[22] = SF[15];
if (inhibitMagStates) {
zeroRows(P,16,21);
zeroCols(P,16,21);
} else if (inhibitWindStates) {
zeroRows(P,22,23);
zeroCols(P,22,23);
}
nextP[0][0] = daxNoise*SQ[3] + SPP[5]*(P[0][0]*SPP[5] - P[1][0]*SPP[4] + P[9][0]*SPP[22] + P[12][0]*SPP[18] + P[2][0]*(2*q1*SF[3] - 2*q2*SF[4] - 2*q3*SF[5] + 2*q0*SF[9])) - SPP[4]*(P[0][1]*SPP[5] - P[1][1]*SPP[4] + P[9][1]*SPP[22] + P[12][1]*SPP[18] + P[2][1]*(2*q1*SF[3] - 2*q2*SF[4] - 2*q3*SF[5] + 2*q0*SF[9])) + SPP[8]*(P[0][2]*SPP[5] + P[2][2]*SPP[8] + P[9][2]*SPP[22] + P[12][2]*SPP[18] - P[1][2]*(2*q0*SF[6] - 2*q3*SF[7] - 2*q1*SF[10] + 2*q2*SF[12])) + SPP[22]*(P[0][9]*SPP[5] - P[1][9]*SPP[4] + P[9][9]*SPP[22] + P[12][9]*SPP[18] + P[2][9]*(2*q1*SF[3] - 2*q2*SF[4] - 2*q3*SF[5] + 2*q0*SF[9])) + SPP[18]*(P[0][12]*SPP[5] - P[1][12]*SPP[4] + P[9][12]*SPP[22] + P[12][12]*SPP[18] + P[2][12]*(2*q1*SF[3] - 2*q2*SF[4] - 2*q3*SF[5] + 2*q0*SF[9]));
nextP[0][1] = SPP[6]*(P[0][1]*SPP[5] - P[1][1]*SPP[4] + P[2][1]*SPP[8] + P[9][1]*SPP[22] + P[12][1]*SPP[18]) - SPP[2]*(P[0][0]*SPP[5] - P[1][0]*SPP[4] + P[2][0]*SPP[8] + P[9][0]*SPP[22] + P[12][0]*SPP[18]) + SPP[22]*(P[0][10]*SPP[5] - P[1][10]*SPP[4] + P[2][10]*SPP[8] + P[9][10]*SPP[22] + P[12][10]*SPP[18]) + SPP[17]*(P[0][13]*SPP[5] - P[1][13]*SPP[4] + P[2][13]*SPP[8] + P[9][13]*SPP[22] + P[12][13]*SPP[18]) - (2*q0*SF[5] - 2*q1*SF[4] - 2*q2*SF[3] + 2*q3*SF[9])*(P[0][2]*SPP[5] - P[1][2]*SPP[4] + P[2][2]*SPP[8] + P[9][2]*SPP[22] + P[12][2]*SPP[18]);
nextP[1][1] = dayNoise*SQ[3] - SPP[2]*(P[1][0]*SPP[6] - P[0][0]*SPP[2] - P[2][0]*SPP[9] + P[10][0]*SPP[22] + P[13][0]*SPP[17]) + SPP[6]*(P[1][1]*SPP[6] - P[0][1]*SPP[2] - P[2][1]*SPP[9] + P[10][1]*SPP[22] + P[13][1]*SPP[17]) - SPP[9]*(P[1][2]*SPP[6] - P[0][2]*SPP[2] - P[2][2]*SPP[9] + P[10][2]*SPP[22] + P[13][2]*SPP[17]) + SPP[22]*(P[1][10]*SPP[6] - P[0][10]*SPP[2] - P[2][10]*SPP[9] + P[10][10]*SPP[22] + P[13][10]*SPP[17]) + SPP[17]*(P[1][13]*SPP[6] - P[0][13]*SPP[2] - P[2][13]*SPP[9] + P[10][13]*SPP[22] + P[13][13]*SPP[17]);
nextP[0][2] = SPP[13]*(P[0][2]*SPP[5] - P[1][2]*SPP[4] + P[2][2]*SPP[8] + P[9][2]*SPP[22] + P[12][2]*SPP[18]) - SPP[3]*(P[0][1]*SPP[5] - P[1][1]*SPP[4] + P[2][1]*SPP[8] + P[9][1]*SPP[22] + P[12][1]*SPP[18]) + SPP[22]*(P[0][11]*SPP[5] - P[1][11]*SPP[4] + P[2][11]*SPP[8] + P[9][11]*SPP[22] + P[12][11]*SPP[18]) + SPP[16]*(P[0][14]*SPP[5] - P[1][14]*SPP[4] + P[2][14]*SPP[8] + P[9][14]*SPP[22] + P[12][14]*SPP[18]) + (2*q2*SF[8] - 2*q0*SF[11] - 2*q1*SF[14] + 2*q3*SF[13])*(P[0][0]*SPP[5] - P[1][0]*SPP[4] + P[2][0]*SPP[8] + P[9][0]*SPP[22] + P[12][0]*SPP[18]);
nextP[1][2] = SPP[13]*(P[1][2]*SPP[6] - P[0][2]*SPP[2] - P[2][2]*SPP[9] + P[10][2]*SPP[22] + P[13][2]*SPP[17]) - SPP[3]*(P[1][1]*SPP[6] - P[0][1]*SPP[2] - P[2][1]*SPP[9] + P[10][1]*SPP[22] + P[13][1]*SPP[17]) + SPP[22]*(P[1][11]*SPP[6] - P[0][11]*SPP[2] - P[2][11]*SPP[9] + P[10][11]*SPP[22] + P[13][11]*SPP[17]) + SPP[16]*(P[1][14]*SPP[6] - P[0][14]*SPP[2] - P[2][14]*SPP[9] + P[10][14]*SPP[22] + P[13][14]*SPP[17]) + (2*q2*SF[8] - 2*q0*SF[11] - 2*q1*SF[14] + 2*q3*SF[13])*(P[1][0]*SPP[6] - P[0][0]*SPP[2] - P[2][0]*SPP[9] + P[10][0]*SPP[22] + P[13][0]*SPP[17]);
nextP[2][2] = dazNoise*SQ[3] - SPP[3]*(P[0][1]*SPP[14] - P[1][1]*SPP[3] + P[2][1]*SPP[13] + P[11][1]*SPP[22] + P[14][1]*SPP[16]) + SPP[14]*(P[0][0]*SPP[14] - P[1][0]*SPP[3] + P[2][0]*SPP[13] + P[11][0]*SPP[22] + P[14][0]*SPP[16]) + SPP[13]*(P[0][2]*SPP[14] - P[1][2]*SPP[3] + P[2][2]*SPP[13] + P[11][2]*SPP[22] + P[14][2]*SPP[16]) + SPP[22]*(P[0][11]*SPP[14] - P[1][11]*SPP[3] + P[2][11]*SPP[13] + P[11][11]*SPP[22] + P[14][11]*SPP[16]) + SPP[16]*(P[0][14]*SPP[14] - P[1][14]*SPP[3] + P[2][14]*SPP[13] + P[11][14]*SPP[22] + P[14][14]*SPP[16]);
nextP[0][3] = P[0][3]*SPP[5] - P[1][3]*SPP[4] + P[2][3]*SPP[8] + P[9][3]*SPP[22] + P[12][3]*SPP[18] + SPP[1]*(P[0][0]*SPP[5] - P[1][0]*SPP[4] + P[2][0]*SPP[8] + P[9][0]*SPP[22] + P[12][0]*SPP[18]) + SPP[15]*(P[0][2]*SPP[5] - P[1][2]*SPP[4] + P[2][2]*SPP[8] + P[9][2]*SPP[22] + P[12][2]*SPP[18]) - SPP[21]*(P[0][15]*SPP[5] - P[1][15]*SPP[4] + P[2][15]*SPP[8] + P[9][15]*SPP[22] + P[12][15]*SPP[18]) + (SF[16]*SF[23] - SF[17]*SPP[21])*(P[0][1]*SPP[5] - P[1][1]*SPP[4] + P[2][1]*SPP[8] + P[9][1]*SPP[22] + P[12][1]*SPP[18]);
nextP[1][3] = P[1][3]*SPP[6] - P[0][3]*SPP[2] - P[2][3]*SPP[9] + P[10][3]*SPP[22] + P[13][3]*SPP[17] + SPP[1]*(P[1][0]*SPP[6] - P[0][0]*SPP[2] - P[2][0]*SPP[9] + P[10][0]*SPP[22] + P[13][0]*SPP[17]) + SPP[15]*(P[1][2]*SPP[6] - P[0][2]*SPP[2] - P[2][2]*SPP[9] + P[10][2]*SPP[22] + P[13][2]*SPP[17]) - SPP[21]*(P[1][15]*SPP[6] - P[0][15]*SPP[2] - P[2][15]*SPP[9] + P[10][15]*SPP[22] + P[13][15]*SPP[17]) + (SF[16]*SF[23] - SF[17]*SPP[21])*(P[1][1]*SPP[6] - P[0][1]*SPP[2] - P[2][1]*SPP[9] + P[10][1]*SPP[22] + P[13][1]*SPP[17]);
nextP[2][3] = P[0][3]*SPP[14] - P[1][3]*SPP[3] + P[2][3]*SPP[13] + P[11][3]*SPP[22] + P[14][3]*SPP[16] + SPP[1]*(P[0][0]*SPP[14] - P[1][0]*SPP[3] + P[2][0]*SPP[13] + P[11][0]*SPP[22] + P[14][0]*SPP[16]) + SPP[15]*(P[0][2]*SPP[14] - P[1][2]*SPP[3] + P[2][2]*SPP[13] + P[11][2]*SPP[22] + P[14][2]*SPP[16]) - SPP[21]*(P[0][15]*SPP[14] - P[1][15]*SPP[3] + P[2][15]*SPP[13] + P[11][15]*SPP[22] + P[14][15]*SPP[16]) + (SF[16]*SF[23] - SF[17]*SPP[21])*(P[0][1]*SPP[14] - P[1][1]*SPP[3] + P[2][1]*SPP[13] + P[11][1]*SPP[22] + P[14][1]*SPP[16]);
nextP[3][3] = P[3][3] + P[0][3]*SPP[1] + P[1][3]*SPP[19] + P[2][3]*SPP[15] - P[15][3]*SPP[21] + dvyNoise*sq(SQ[6] - 2*q0*q3) + dvzNoise*sq(SQ[5] + 2*q0*q2) + SPP[1]*(P[3][0] + P[0][0]*SPP[1] + P[1][0]*SPP[19] + P[2][0]*SPP[15] - P[15][0]*SPP[21]) + SPP[19]*(P[3][1] + P[0][1]*SPP[1] + P[1][1]*SPP[19] + P[2][1]*SPP[15] - P[15][1]*SPP[21]) + SPP[15]*(P[3][2] + P[0][2]*SPP[1] + P[1][2]*SPP[19] + P[2][2]*SPP[15] - P[15][2]*SPP[21]) - SPP[21]*(P[3][15] + P[0][15]*SPP[1] + P[2][15]*SPP[15] - P[15][15]*SPP[21] + P[1][15]*(SF[16]*SF[23] - SF[17]*SPP[21])) + dvxNoise*sq(SG[1] + SG[2] - SG[3] - SQ[7]);
nextP[0][4] = P[0][4]*SPP[5] - P[1][4]*SPP[4] + P[2][4]*SPP[8] + P[9][4]*SPP[22] + P[12][4]*SPP[18] + SF[22]*(P[0][15]*SPP[5] - P[1][15]*SPP[4] + P[2][15]*SPP[8] + P[9][15]*SPP[22] + P[12][15]*SPP[18]) + SPP[12]*(P[0][1]*SPP[5] - P[1][1]*SPP[4] + P[2][1]*SPP[8] + P[9][1]*SPP[22] + P[12][1]*SPP[18]) + SPP[20]*(P[0][0]*SPP[5] - P[1][0]*SPP[4] + P[2][0]*SPP[8] + P[9][0]*SPP[22] + P[12][0]*SPP[18]) + SPP[11]*(P[0][2]*SPP[5] - P[1][2]*SPP[4] + P[2][2]*SPP[8] + P[9][2]*SPP[22] + P[12][2]*SPP[18]);
nextP[1][4] = P[1][4]*SPP[6] - P[0][4]*SPP[2] - P[2][4]*SPP[9] + P[10][4]*SPP[22] + P[13][4]*SPP[17] + SF[22]*(P[1][15]*SPP[6] - P[0][15]*SPP[2] - P[2][15]*SPP[9] + P[10][15]*SPP[22] + P[13][15]*SPP[17]) + SPP[12]*(P[1][1]*SPP[6] - P[0][1]*SPP[2] - P[2][1]*SPP[9] + P[10][1]*SPP[22] + P[13][1]*SPP[17]) + SPP[20]*(P[1][0]*SPP[6] - P[0][0]*SPP[2] - P[2][0]*SPP[9] + P[10][0]*SPP[22] + P[13][0]*SPP[17]) + SPP[11]*(P[1][2]*SPP[6] - P[0][2]*SPP[2] - P[2][2]*SPP[9] + P[10][2]*SPP[22] + P[13][2]*SPP[17]);
nextP[2][4] = P[0][4]*SPP[14] - P[1][4]*SPP[3] + P[2][4]*SPP[13] + P[11][4]*SPP[22] + P[14][4]*SPP[16] + SF[22]*(P[0][15]*SPP[14] - P[1][15]*SPP[3] + P[2][15]*SPP[13] + P[11][15]*SPP[22] + P[14][15]*SPP[16]) + SPP[12]*(P[0][1]*SPP[14] - P[1][1]*SPP[3] + P[2][1]*SPP[13] + P[11][1]*SPP[22] + P[14][1]*SPP[16]) + SPP[20]*(P[0][0]*SPP[14] - P[1][0]*SPP[3] + P[2][0]*SPP[13] + P[11][0]*SPP[22] + P[14][0]*SPP[16]) + SPP[11]*(P[0][2]*SPP[14] - P[1][2]*SPP[3] + P[2][2]*SPP[13] + P[11][2]*SPP[22] + P[14][2]*SPP[16]);
nextP[3][4] = P[3][4] + SQ[2] + P[0][4]*SPP[1] + P[1][4]*SPP[19] + P[2][4]*SPP[15] - P[15][4]*SPP[21] + SF[22]*(P[3][15] + P[0][15]*SPP[1] + P[1][15]*SPP[19] + P[2][15]*SPP[15] - P[15][15]*SPP[21]) + SPP[12]*(P[3][1] + P[0][1]*SPP[1] + P[1][1]*SPP[19] + P[2][1]*SPP[15] - P[15][1]*SPP[21]) + SPP[20]*(P[3][0] + P[0][0]*SPP[1] + P[1][0]*SPP[19] + P[2][0]*SPP[15] - P[15][0]*SPP[21]) + SPP[11]*(P[3][2] + P[0][2]*SPP[1] + P[1][2]*SPP[19] + P[2][2]*SPP[15] - P[15][2]*SPP[21]);
nextP[4][4] = P[4][4] + P[15][4]*SF[22] + P[0][4]*SPP[20] + P[1][4]*SPP[12] + P[2][4]*SPP[11] + dvxNoise*sq(SQ[6] + 2*q0*q3) + dvzNoise*sq(SQ[4] - 2*q0*q1) + SF[22]*(P[4][15] + P[15][15]*SF[22] + P[0][15]*SPP[20] + P[1][15]*SPP[12] + P[2][15]*SPP[11]) + SPP[12]*(P[4][1] + P[15][1]*SF[22] + P[0][1]*SPP[20] + P[1][1]*SPP[12] + P[2][1]*SPP[11]) + SPP[20]*(P[4][0] + P[15][0]*SF[22] + P[0][0]*SPP[20] + P[1][0]*SPP[12] + P[2][0]*SPP[11]) + SPP[11]*(P[4][2] + P[15][2]*SF[22] + P[0][2]*SPP[20] + P[1][2]*SPP[12] + P[2][2]*SPP[11]) + dvyNoise*sq(SG[1] - SG[2] + SG[3] - SQ[7]);
nextP[0][5] = P[0][5]*SPP[5] - P[1][5]*SPP[4] + P[2][5]*SPP[8] + P[9][5]*SPP[22] + P[12][5]*SPP[18] + SF[20]*(P[0][15]*SPP[5] - P[1][15]*SPP[4] + P[2][15]*SPP[8] + P[9][15]*SPP[22] + P[12][15]*SPP[18]) - SPP[7]*(P[0][0]*SPP[5] - P[1][0]*SPP[4] + P[2][0]*SPP[8] + P[9][0]*SPP[22] + P[12][0]*SPP[18]) + SPP[0]*(P[0][2]*SPP[5] - P[1][2]*SPP[4] + P[2][2]*SPP[8] + P[9][2]*SPP[22] + P[12][2]*SPP[18]) + SPP[10]*(P[0][1]*SPP[5] - P[1][1]*SPP[4] + P[2][1]*SPP[8] + P[9][1]*SPP[22] + P[12][1]*SPP[18]);
nextP[1][5] = P[1][5]*SPP[6] - P[0][5]*SPP[2] - P[2][5]*SPP[9] + P[10][5]*SPP[22] + P[13][5]*SPP[17] + SF[20]*(P[1][15]*SPP[6] - P[0][15]*SPP[2] - P[2][15]*SPP[9] + P[10][15]*SPP[22] + P[13][15]*SPP[17]) - SPP[7]*(P[1][0]*SPP[6] - P[0][0]*SPP[2] - P[2][0]*SPP[9] + P[10][0]*SPP[22] + P[13][0]*SPP[17]) + SPP[0]*(P[1][2]*SPP[6] - P[0][2]*SPP[2] - P[2][2]*SPP[9] + P[10][2]*SPP[22] + P[13][2]*SPP[17]) + SPP[10]*(P[1][1]*SPP[6] - P[0][1]*SPP[2] - P[2][1]*SPP[9] + P[10][1]*SPP[22] + P[13][1]*SPP[17]);
nextP[2][5] = P[0][5]*SPP[14] - P[1][5]*SPP[3] + P[2][5]*SPP[13] + P[11][5]*SPP[22] + P[14][5]*SPP[16] + SF[20]*(P[0][15]*SPP[14] - P[1][15]*SPP[3] + P[2][15]*SPP[13] + P[11][15]*SPP[22] + P[14][15]*SPP[16]) - SPP[7]*(P[0][0]*SPP[14] - P[1][0]*SPP[3] + P[2][0]*SPP[13] + P[11][0]*SPP[22] + P[14][0]*SPP[16]) + SPP[0]*(P[0][2]*SPP[14] - P[1][2]*SPP[3] + P[2][2]*SPP[13] + P[11][2]*SPP[22] + P[14][2]*SPP[16]) + SPP[10]*(P[0][1]*SPP[14] - P[1][1]*SPP[3] + P[2][1]*SPP[13] + P[11][1]*SPP[22] + P[14][1]*SPP[16]);
nextP[3][5] = P[3][5] + SQ[1] + P[0][5]*SPP[1] + P[1][5]*SPP[19] + P[2][5]*SPP[15] - P[15][5]*SPP[21] + SF[20]*(P[3][15] + P[0][15]*SPP[1] + P[1][15]*SPP[19] + P[2][15]*SPP[15] - P[15][15]*SPP[21]) - SPP[7]*(P[3][0] + P[0][0]*SPP[1] + P[1][0]*SPP[19] + P[2][0]*SPP[15] - P[15][0]*SPP[21]) + SPP[0]*(P[3][2] + P[0][2]*SPP[1] + P[1][2]*SPP[19] + P[2][2]*SPP[15] - P[15][2]*SPP[21]) + SPP[10]*(P[3][1] + P[0][1]*SPP[1] + P[1][1]*SPP[19] + P[2][1]*SPP[15] - P[15][1]*SPP[21]);
nextP[4][5] = P[4][5] + SQ[0] + P[15][5]*SF[22] + P[0][5]*SPP[20] + P[1][5]*SPP[12] + P[2][5]*SPP[11] + SF[20]*(P[4][15] + P[15][15]*SF[22] + P[0][15]*SPP[20] + P[1][15]*SPP[12] + P[2][15]*SPP[11]) - SPP[7]*(P[4][0] + P[15][0]*SF[22] + P[0][0]*SPP[20] + P[1][0]*SPP[12] + P[2][0]*SPP[11]) + SPP[0]*(P[4][2] + P[15][2]*SF[22] + P[0][2]*SPP[20] + P[1][2]*SPP[12] + P[2][2]*SPP[11]) + SPP[10]*(P[4][1] + P[15][1]*SF[22] + P[0][1]*SPP[20] + P[1][1]*SPP[12] + P[2][1]*SPP[11]);
nextP[5][5] = P[5][5] + P[15][5]*SF[20] - P[0][5]*SPP[7] + P[1][5]*SPP[10] + P[2][5]*SPP[0] + dvxNoise*sq(SQ[5] - 2*q0*q2) + dvyNoise*sq(SQ[4] + 2*q0*q1) + SF[20]*(P[5][15] + P[15][15]*SF[20] - P[0][15]*SPP[7] + P[1][15]*SPP[10] + P[2][15]*SPP[0]) - SPP[7]*(P[5][0] + P[15][0]*SF[20] - P[0][0]*SPP[7] + P[1][0]*SPP[10] + P[2][0]*SPP[0]) + SPP[0]*(P[5][2] + P[15][2]*SF[20] - P[0][2]*SPP[7] + P[1][2]*SPP[10] + P[2][2]*SPP[0]) + SPP[10]*(P[5][1] + P[15][1]*SF[20] - P[0][1]*SPP[7] + P[1][1]*SPP[10] + P[2][1]*SPP[0]) + dvzNoise*sq(SG[1] - SG[2] - SG[3] + SQ[7]);
nextP[0][6] = P[0][6]*SPP[5] - P[1][6]*SPP[4] + P[2][6]*SPP[8] + P[9][6]*SPP[22] + P[12][6]*SPP[18] + dt*(P[0][3]*SPP[5] - P[1][3]*SPP[4] + P[2][3]*SPP[8] + P[9][3]*SPP[22] + P[12][3]*SPP[18]);
nextP[1][6] = P[1][6]*SPP[6] - P[0][6]*SPP[2] - P[2][6]*SPP[9] + P[10][6]*SPP[22] + P[13][6]*SPP[17] + dt*(P[1][3]*SPP[6] - P[0][3]*SPP[2] - P[2][3]*SPP[9] + P[10][3]*SPP[22] + P[13][3]*SPP[17]);
nextP[2][6] = P[0][6]*SPP[14] - P[1][6]*SPP[3] + P[2][6]*SPP[13] + P[11][6]*SPP[22] + P[14][6]*SPP[16] + dt*(P[0][3]*SPP[14] - P[1][3]*SPP[3] + P[2][3]*SPP[13] + P[11][3]*SPP[22] + P[14][3]*SPP[16]);
nextP[3][6] = P[3][6] + P[0][6]*SPP[1] + P[1][6]*SPP[19] + P[2][6]*SPP[15] - P[15][6]*SPP[21] + dt*(P[3][3] + P[0][3]*SPP[1] + P[1][3]*SPP[19] + P[2][3]*SPP[15] - P[15][3]*SPP[21]);
nextP[4][6] = P[4][6] + P[15][6]*SF[22] + P[0][6]*SPP[20] + P[1][6]*SPP[12] + P[2][6]*SPP[11] + dt*(P[4][3] + P[15][3]*SF[22] + P[0][3]*SPP[20] + P[1][3]*SPP[12] + P[2][3]*SPP[11]);
nextP[5][6] = P[5][6] + P[15][6]*SF[20] - P[0][6]*SPP[7] + P[1][6]*SPP[10] + P[2][6]*SPP[0] + dt*(P[5][3] + P[15][3]*SF[20] - P[0][3]*SPP[7] + P[1][3]*SPP[10] + P[2][3]*SPP[0]);
nextP[6][6] = P[6][6] + P[3][6]*dt + dt*(P[6][3] + P[3][3]*dt);
nextP[0][7] = P[0][7]*SPP[5] - P[1][7]*SPP[4] + P[2][7]*SPP[8] + P[9][7]*SPP[22] + P[12][7]*SPP[18] + dt*(P[0][4]*SPP[5] - P[1][4]*SPP[4] + P[2][4]*SPP[8] + P[9][4]*SPP[22] + P[12][4]*SPP[18]);
nextP[1][7] = P[1][7]*SPP[6] - P[0][7]*SPP[2] - P[2][7]*SPP[9] + P[10][7]*SPP[22] + P[13][7]*SPP[17] + dt*(P[1][4]*SPP[6] - P[0][4]*SPP[2] - P[2][4]*SPP[9] + P[10][4]*SPP[22] + P[13][4]*SPP[17]);
nextP[2][7] = P[0][7]*SPP[14] - P[1][7]*SPP[3] + P[2][7]*SPP[13] + P[11][7]*SPP[22] + P[14][7]*SPP[16] + dt*(P[0][4]*SPP[14] - P[1][4]*SPP[3] + P[2][4]*SPP[13] + P[11][4]*SPP[22] + P[14][4]*SPP[16]);
nextP[3][7] = P[3][7] + P[0][7]*SPP[1] + P[1][7]*SPP[19] + P[2][7]*SPP[15] - P[15][7]*SPP[21] + dt*(P[3][4] + P[0][4]*SPP[1] + P[1][4]*SPP[19] + P[2][4]*SPP[15] - P[15][4]*SPP[21]);
nextP[4][7] = P[4][7] + P[15][7]*SF[22] + P[0][7]*SPP[20] + P[1][7]*SPP[12] + P[2][7]*SPP[11] + dt*(P[4][4] + P[15][4]*SF[22] + P[0][4]*SPP[20] + P[1][4]*SPP[12] + P[2][4]*SPP[11]);
nextP[5][7] = P[5][7] + P[15][7]*SF[20] - P[0][7]*SPP[7] + P[1][7]*SPP[10] + P[2][7]*SPP[0] + dt*(P[5][4] + P[15][4]*SF[20] - P[0][4]*SPP[7] + P[1][4]*SPP[10] + P[2][4]*SPP[0]);
nextP[6][7] = P[6][7] + P[3][7]*dt + dt*(P[6][4] + P[3][4]*dt);
nextP[7][7] = P[7][7] + P[4][7]*dt + dt*(P[7][4] + P[4][4]*dt);
nextP[0][8] = P[0][8]*SPP[5] - P[1][8]*SPP[4] + P[2][8]*SPP[8] + P[9][8]*SPP[22] + P[12][8]*SPP[18] + dt*(P[0][5]*SPP[5] - P[1][5]*SPP[4] + P[2][5]*SPP[8] + P[9][5]*SPP[22] + P[12][5]*SPP[18]);
nextP[1][8] = P[1][8]*SPP[6] - P[0][8]*SPP[2] - P[2][8]*SPP[9] + P[10][8]*SPP[22] + P[13][8]*SPP[17] + dt*(P[1][5]*SPP[6] - P[0][5]*SPP[2] - P[2][5]*SPP[9] + P[10][5]*SPP[22] + P[13][5]*SPP[17]);
nextP[2][8] = P[0][8]*SPP[14] - P[1][8]*SPP[3] + P[2][8]*SPP[13] + P[11][8]*SPP[22] + P[14][8]*SPP[16] + dt*(P[0][5]*SPP[14] - P[1][5]*SPP[3] + P[2][5]*SPP[13] + P[11][5]*SPP[22] + P[14][5]*SPP[16]);
nextP[3][8] = P[3][8] + P[0][8]*SPP[1] + P[1][8]*SPP[19] + P[2][8]*SPP[15] - P[15][8]*SPP[21] + dt*(P[3][5] + P[0][5]*SPP[1] + P[1][5]*SPP[19] + P[2][5]*SPP[15] - P[15][5]*SPP[21]);
nextP[4][8] = P[4][8] + P[15][8]*SF[22] + P[0][8]*SPP[20] + P[1][8]*SPP[12] + P[2][8]*SPP[11] + dt*(P[4][5] + P[15][5]*SF[22] + P[0][5]*SPP[20] + P[1][5]*SPP[12] + P[2][5]*SPP[11]);
nextP[5][8] = P[5][8] + P[15][8]*SF[20] - P[0][8]*SPP[7] + P[1][8]*SPP[10] + P[2][8]*SPP[0] + dt*(P[5][5] + P[15][5]*SF[20] - P[0][5]*SPP[7] + P[1][5]*SPP[10] + P[2][5]*SPP[0]);
nextP[6][8] = P[6][8] + P[3][8]*dt + dt*(P[6][5] + P[3][5]*dt);
nextP[7][8] = P[7][8] + P[4][8]*dt + dt*(P[7][5] + P[4][5]*dt);
nextP[8][8] = P[8][8] + P[5][8]*dt + dt*(P[8][5] + P[5][5]*dt);
nextP[0][9] = P[0][9]*SPP[5] - P[1][9]*SPP[4] + P[2][9]*SPP[8] + P[9][9]*SPP[22] + P[12][9]*SPP[18];
nextP[1][9] = P[1][9]*SPP[6] - P[0][9]*SPP[2] - P[2][9]*SPP[9] + P[10][9]*SPP[22] + P[13][9]*SPP[17];
nextP[2][9] = P[0][9]*SPP[14] - P[1][9]*SPP[3] + P[2][9]*SPP[13] + P[11][9]*SPP[22] + P[14][9]*SPP[16];
nextP[3][9] = P[3][9] + P[0][9]*SPP[1] + P[1][9]*SPP[19] + P[2][9]*SPP[15] - P[15][9]*SPP[21];
nextP[4][9] = P[4][9] + P[15][9]*SF[22] + P[0][9]*SPP[20] + P[1][9]*SPP[12] + P[2][9]*SPP[11];
nextP[5][9] = P[5][9] + P[15][9]*SF[20] - P[0][9]*SPP[7] + P[1][9]*SPP[10] + P[2][9]*SPP[0];
nextP[6][9] = P[6][9] + P[3][9]*dt;
nextP[7][9] = P[7][9] + P[4][9]*dt;
nextP[8][9] = P[8][9] + P[5][9]*dt;
nextP[9][9] = P[9][9];
nextP[0][10] = P[0][10]*SPP[5] - P[1][10]*SPP[4] + P[2][10]*SPP[8] + P[9][10]*SPP[22] + P[12][10]*SPP[18];
nextP[1][10] = P[1][10]*SPP[6] - P[0][10]*SPP[2] - P[2][10]*SPP[9] + P[10][10]*SPP[22] + P[13][10]*SPP[17];
nextP[2][10] = P[0][10]*SPP[14] - P[1][10]*SPP[3] + P[2][10]*SPP[13] + P[11][10]*SPP[22] + P[14][10]*SPP[16];
nextP[3][10] = P[3][10] + P[0][10]*SPP[1] + P[1][10]*SPP[19] + P[2][10]*SPP[15] - P[15][10]*SPP[21];
nextP[4][10] = P[4][10] + P[15][10]*SF[22] + P[0][10]*SPP[20] + P[1][10]*SPP[12] + P[2][10]*SPP[11];
nextP[5][10] = P[5][10] + P[15][10]*SF[20] - P[0][10]*SPP[7] + P[1][10]*SPP[10] + P[2][10]*SPP[0];
nextP[6][10] = P[6][10] + P[3][10]*dt;
nextP[7][10] = P[7][10] + P[4][10]*dt;
nextP[8][10] = P[8][10] + P[5][10]*dt;
nextP[9][10] = P[9][10];
nextP[10][10] = P[10][10];
nextP[0][11] = P[0][11]*SPP[5] - P[1][11]*SPP[4] + P[2][11]*SPP[8] + P[9][11]*SPP[22] + P[12][11]*SPP[18];
nextP[1][11] = P[1][11]*SPP[6] - P[0][11]*SPP[2] - P[2][11]*SPP[9] + P[10][11]*SPP[22] + P[13][11]*SPP[17];
nextP[2][11] = P[0][11]*SPP[14] - P[1][11]*SPP[3] + P[2][11]*SPP[13] + P[11][11]*SPP[22] + P[14][11]*SPP[16];
nextP[3][11] = P[3][11] + P[0][11]*SPP[1] + P[1][11]*SPP[19] + P[2][11]*SPP[15] - P[15][11]*SPP[21];
nextP[4][11] = P[4][11] + P[15][11]*SF[22] + P[0][11]*SPP[20] + P[1][11]*SPP[12] + P[2][11]*SPP[11];
nextP[5][11] = P[5][11] + P[15][11]*SF[20] - P[0][11]*SPP[7] + P[1][11]*SPP[10] + P[2][11]*SPP[0];
nextP[6][11] = P[6][11] + P[3][11]*dt;
nextP[7][11] = P[7][11] + P[4][11]*dt;
nextP[8][11] = P[8][11] + P[5][11]*dt;
nextP[9][11] = P[9][11];
nextP[10][11] = P[10][11];
nextP[11][11] = P[11][11];
nextP[0][12] = P[0][12]*SPP[5] - P[1][12]*SPP[4] + P[2][12]*SPP[8] + P[9][12]*SPP[22] + P[12][12]*SPP[18];
nextP[1][12] = P[1][12]*SPP[6] - P[0][12]*SPP[2] - P[2][12]*SPP[9] + P[10][12]*SPP[22] + P[13][12]*SPP[17];
nextP[2][12] = P[0][12]*SPP[14] - P[1][12]*SPP[3] + P[2][12]*SPP[13] + P[11][12]*SPP[22] + P[14][12]*SPP[16];
nextP[3][12] = P[3][12] + P[0][12]*SPP[1] + P[1][12]*SPP[19] + P[2][12]*SPP[15] - P[15][12]*SPP[21];
nextP[4][12] = P[4][12] + P[15][12]*SF[22] + P[0][12]*SPP[20] + P[1][12]*SPP[12] + P[2][12]*SPP[11];
nextP[5][12] = P[5][12] + P[15][12]*SF[20] - P[0][12]*SPP[7] + P[1][12]*SPP[10] + P[2][12]*SPP[0];
nextP[6][12] = P[6][12] + P[3][12]*dt;
nextP[7][12] = P[7][12] + P[4][12]*dt;
nextP[8][12] = P[8][12] + P[5][12]*dt;
nextP[9][12] = P[9][12];
nextP[10][12] = P[10][12];
nextP[11][12] = P[11][12];
nextP[12][12] = P[12][12];
nextP[0][13] = P[0][13]*SPP[5] - P[1][13]*SPP[4] + P[2][13]*SPP[8] + P[9][13]*SPP[22] + P[12][13]*SPP[18];
nextP[1][13] = P[1][13]*SPP[6] - P[0][13]*SPP[2] - P[2][13]*SPP[9] + P[10][13]*SPP[22] + P[13][13]*SPP[17];
nextP[2][13] = P[0][13]*SPP[14] - P[1][13]*SPP[3] + P[2][13]*SPP[13] + P[11][13]*SPP[22] + P[14][13]*SPP[16];
nextP[3][13] = P[3][13] + P[0][13]*SPP[1] + P[1][13]*SPP[19] + P[2][13]*SPP[15] - P[15][13]*SPP[21];
nextP[4][13] = P[4][13] + P[15][13]*SF[22] + P[0][13]*SPP[20] + P[1][13]*SPP[12] + P[2][13]*SPP[11];
nextP[5][13] = P[5][13] + P[15][13]*SF[20] - P[0][13]*SPP[7] + P[1][13]*SPP[10] + P[2][13]*SPP[0];
nextP[6][13] = P[6][13] + P[3][13]*dt;
nextP[7][13] = P[7][13] + P[4][13]*dt;
nextP[8][13] = P[8][13] + P[5][13]*dt;
nextP[9][13] = P[9][13];
nextP[10][13] = P[10][13];
nextP[11][13] = P[11][13];
nextP[12][13] = P[12][13];
nextP[13][13] = P[13][13];
nextP[0][14] = P[0][14]*SPP[5] - P[1][14]*SPP[4] + P[2][14]*SPP[8] + P[9][14]*SPP[22] + P[12][14]*SPP[18];
nextP[1][14] = P[1][14]*SPP[6] - P[0][14]*SPP[2] - P[2][14]*SPP[9] + P[10][14]*SPP[22] + P[13][14]*SPP[17];
nextP[2][14] = P[0][14]*SPP[14] - P[1][14]*SPP[3] + P[2][14]*SPP[13] + P[11][14]*SPP[22] + P[14][14]*SPP[16];
nextP[3][14] = P[3][14] + P[0][14]*SPP[1] + P[1][14]*SPP[19] + P[2][14]*SPP[15] - P[15][14]*SPP[21];
nextP[4][14] = P[4][14] + P[15][14]*SF[22] + P[0][14]*SPP[20] + P[1][14]*SPP[12] + P[2][14]*SPP[11];
nextP[5][14] = P[5][14] + P[15][14]*SF[20] - P[0][14]*SPP[7] + P[1][14]*SPP[10] + P[2][14]*SPP[0];
nextP[6][14] = P[6][14] + P[3][14]*dt;
nextP[7][14] = P[7][14] + P[4][14]*dt;
nextP[8][14] = P[8][14] + P[5][14]*dt;
nextP[9][14] = P[9][14];
nextP[10][14] = P[10][14];
nextP[11][14] = P[11][14];
nextP[12][14] = P[12][14];
nextP[13][14] = P[13][14];
nextP[14][14] = P[14][14];
nextP[0][15] = P[0][15]*SPP[5] - P[1][15]*SPP[4] + P[2][15]*SPP[8] + P[9][15]*SPP[22] + P[12][15]*SPP[18];
nextP[1][15] = P[1][15]*SPP[6] - P[0][15]*SPP[2] - P[2][15]*SPP[9] + P[10][15]*SPP[22] + P[13][15]*SPP[17];
nextP[2][15] = P[0][15]*SPP[14] - P[1][15]*SPP[3] + P[2][15]*SPP[13] + P[11][15]*SPP[22] + P[14][15]*SPP[16];
nextP[3][15] = P[3][15] + P[0][15]*SPP[1] + P[1][15]*SPP[19] + P[2][15]*SPP[15] - P[15][15]*SPP[21];
nextP[4][15] = P[4][15] + P[15][15]*SF[22] + P[0][15]*SPP[20] + P[1][15]*SPP[12] + P[2][15]*SPP[11];
nextP[5][15] = P[5][15] + P[15][15]*SF[20] - P[0][15]*SPP[7] + P[1][15]*SPP[10] + P[2][15]*SPP[0];
nextP[6][15] = P[6][15] + P[3][15]*dt;
nextP[7][15] = P[7][15] + P[4][15]*dt;
nextP[8][15] = P[8][15] + P[5][15]*dt;
nextP[9][15] = P[9][15];
nextP[10][15] = P[10][15];
nextP[11][15] = P[11][15];
nextP[12][15] = P[12][15];
nextP[13][15] = P[13][15];
nextP[14][15] = P[14][15];
nextP[15][15] = P[15][15];
if (stateIndexLim > 15) {
nextP[0][16] = P[0][16]*SPP[5] - P[1][16]*SPP[4] + P[2][16]*SPP[8] + P[9][16]*SPP[22] + P[12][16]*SPP[18];
nextP[1][16] = P[1][16]*SPP[6] - P[0][16]*SPP[2] - P[2][16]*SPP[9] + P[10][16]*SPP[22] + P[13][16]*SPP[17];
nextP[2][16] = P[0][16]*SPP[14] - P[1][16]*SPP[3] + P[2][16]*SPP[13] + P[11][16]*SPP[22] + P[14][16]*SPP[16];
nextP[3][16] = P[3][16] + P[0][16]*SPP[1] + P[1][16]*SPP[19] + P[2][16]*SPP[15] - P[15][16]*SPP[21];
nextP[4][16] = P[4][16] + P[15][16]*SF[22] + P[0][16]*SPP[20] + P[1][16]*SPP[12] + P[2][16]*SPP[11];
nextP[5][16] = P[5][16] + P[15][16]*SF[20] - P[0][16]*SPP[7] + P[1][16]*SPP[10] + P[2][16]*SPP[0];
nextP[6][16] = P[6][16] + P[3][16]*dt;
nextP[7][16] = P[7][16] + P[4][16]*dt;
nextP[8][16] = P[8][16] + P[5][16]*dt;
nextP[9][16] = P[9][16];
nextP[10][16] = P[10][16];
nextP[11][16] = P[11][16];
nextP[12][16] = P[12][16];
nextP[13][16] = P[13][16];
nextP[14][16] = P[14][16];
nextP[15][16] = P[15][16];
nextP[16][16] = P[16][16];
nextP[0][17] = P[0][17]*SPP[5] - P[1][17]*SPP[4] + P[2][17]*SPP[8] + P[9][17]*SPP[22] + P[12][17]*SPP[18];
nextP[1][17] = P[1][17]*SPP[6] - P[0][17]*SPP[2] - P[2][17]*SPP[9] + P[10][17]*SPP[22] + P[13][17]*SPP[17];
nextP[2][17] = P[0][17]*SPP[14] - P[1][17]*SPP[3] + P[2][17]*SPP[13] + P[11][17]*SPP[22] + P[14][17]*SPP[16];
nextP[3][17] = P[3][17] + P[0][17]*SPP[1] + P[1][17]*SPP[19] + P[2][17]*SPP[15] - P[15][17]*SPP[21];
nextP[4][17] = P[4][17] + P[15][17]*SF[22] + P[0][17]*SPP[20] + P[1][17]*SPP[12] + P[2][17]*SPP[11];
nextP[5][17] = P[5][17] + P[15][17]*SF[20] - P[0][17]*SPP[7] + P[1][17]*SPP[10] + P[2][17]*SPP[0];
nextP[6][17] = P[6][17] + P[3][17]*dt;
nextP[7][17] = P[7][17] + P[4][17]*dt;
nextP[8][17] = P[8][17] + P[5][17]*dt;
nextP[9][17] = P[9][17];
nextP[10][17] = P[10][17];
nextP[11][17] = P[11][17];
nextP[12][17] = P[12][17];
nextP[13][17] = P[13][17];
nextP[14][17] = P[14][17];
nextP[15][17] = P[15][17];
nextP[16][17] = P[16][17];
nextP[17][17] = P[17][17];
nextP[0][18] = P[0][18]*SPP[5] - P[1][18]*SPP[4] + P[2][18]*SPP[8] + P[9][18]*SPP[22] + P[12][18]*SPP[18];
nextP[1][18] = P[1][18]*SPP[6] - P[0][18]*SPP[2] - P[2][18]*SPP[9] + P[10][18]*SPP[22] + P[13][18]*SPP[17];
nextP[2][18] = P[0][18]*SPP[14] - P[1][18]*SPP[3] + P[2][18]*SPP[13] + P[11][18]*SPP[22] + P[14][18]*SPP[16];
nextP[3][18] = P[3][18] + P[0][18]*SPP[1] + P[1][18]*SPP[19] + P[2][18]*SPP[15] - P[15][18]*SPP[21];
nextP[4][18] = P[4][18] + P[15][18]*SF[22] + P[0][18]*SPP[20] + P[1][18]*SPP[12] + P[2][18]*SPP[11];
nextP[5][18] = P[5][18] + P[15][18]*SF[20] - P[0][18]*SPP[7] + P[1][18]*SPP[10] + P[2][18]*SPP[0];
nextP[6][18] = P[6][18] + P[3][18]*dt;
nextP[7][18] = P[7][18] + P[4][18]*dt;
nextP[8][18] = P[8][18] + P[5][18]*dt;
nextP[9][18] = P[9][18];
nextP[10][18] = P[10][18];
nextP[11][18] = P[11][18];
nextP[12][18] = P[12][18];
nextP[13][18] = P[13][18];
nextP[14][18] = P[14][18];
nextP[15][18] = P[15][18];
nextP[16][18] = P[16][18];
nextP[17][18] = P[17][18];
nextP[18][18] = P[18][18];
nextP[0][19] = P[0][19]*SPP[5] - P[1][19]*SPP[4] + P[2][19]*SPP[8] + P[9][19]*SPP[22] + P[12][19]*SPP[18];
nextP[1][19] = P[1][19]*SPP[6] - P[0][19]*SPP[2] - P[2][19]*SPP[9] + P[10][19]*SPP[22] + P[13][19]*SPP[17];
nextP[2][19] = P[0][19]*SPP[14] - P[1][19]*SPP[3] + P[2][19]*SPP[13] + P[11][19]*SPP[22] + P[14][19]*SPP[16];
nextP[3][19] = P[3][19] + P[0][19]*SPP[1] + P[1][19]*SPP[19] + P[2][19]*SPP[15] - P[15][19]*SPP[21];
nextP[4][19] = P[4][19] + P[15][19]*SF[22] + P[0][19]*SPP[20] + P[1][19]*SPP[12] + P[2][19]*SPP[11];
nextP[5][19] = P[5][19] + P[15][19]*SF[20] - P[0][19]*SPP[7] + P[1][19]*SPP[10] + P[2][19]*SPP[0];
nextP[6][19] = P[6][19] + P[3][19]*dt;
nextP[7][19] = P[7][19] + P[4][19]*dt;
nextP[8][19] = P[8][19] + P[5][19]*dt;
nextP[9][19] = P[9][19];
nextP[10][19] = P[10][19];
nextP[11][19] = P[11][19];
nextP[12][19] = P[12][19];
nextP[13][19] = P[13][19];
nextP[14][19] = P[14][19];
nextP[15][19] = P[15][19];
nextP[16][19] = P[16][19];
nextP[17][19] = P[17][19];
nextP[18][19] = P[18][19];
nextP[19][19] = P[19][19];
nextP[0][20] = P[0][20]*SPP[5] - P[1][20]*SPP[4] + P[2][20]*SPP[8] + P[9][20]*SPP[22] + P[12][20]*SPP[18];
nextP[1][20] = P[1][20]*SPP[6] - P[0][20]*SPP[2] - P[2][20]*SPP[9] + P[10][20]*SPP[22] + P[13][20]*SPP[17];
nextP[2][20] = P[0][20]*SPP[14] - P[1][20]*SPP[3] + P[2][20]*SPP[13] + P[11][20]*SPP[22] + P[14][20]*SPP[16];
nextP[3][20] = P[3][20] + P[0][20]*SPP[1] + P[1][20]*SPP[19] + P[2][20]*SPP[15] - P[15][20]*SPP[21];
nextP[4][20] = P[4][20] + P[15][20]*SF[22] + P[0][20]*SPP[20] + P[1][20]*SPP[12] + P[2][20]*SPP[11];
nextP[5][20] = P[5][20] + P[15][20]*SF[20] - P[0][20]*SPP[7] + P[1][20]*SPP[10] + P[2][20]*SPP[0];
nextP[6][20] = P[6][20] + P[3][20]*dt;
nextP[7][20] = P[7][20] + P[4][20]*dt;
nextP[8][20] = P[8][20] + P[5][20]*dt;
nextP[9][20] = P[9][20];
nextP[10][20] = P[10][20];
nextP[11][20] = P[11][20];
nextP[12][20] = P[12][20];
nextP[13][20] = P[13][20];
nextP[14][20] = P[14][20];
nextP[15][20] = P[15][20];
nextP[16][20] = P[16][20];
nextP[17][20] = P[17][20];
nextP[18][20] = P[18][20];
nextP[19][20] = P[19][20];
nextP[20][20] = P[20][20];
nextP[0][21] = P[0][21]*SPP[5] - P[1][21]*SPP[4] + P[2][21]*SPP[8] + P[9][21]*SPP[22] + P[12][21]*SPP[18];
nextP[1][21] = P[1][21]*SPP[6] - P[0][21]*SPP[2] - P[2][21]*SPP[9] + P[10][21]*SPP[22] + P[13][21]*SPP[17];
nextP[2][21] = P[0][21]*SPP[14] - P[1][21]*SPP[3] + P[2][21]*SPP[13] + P[11][21]*SPP[22] + P[14][21]*SPP[16];
nextP[3][21] = P[3][21] + P[0][21]*SPP[1] + P[1][21]*SPP[19] + P[2][21]*SPP[15] - P[15][21]*SPP[21];
nextP[4][21] = P[4][21] + P[15][21]*SF[22] + P[0][21]*SPP[20] + P[1][21]*SPP[12] + P[2][21]*SPP[11];
nextP[5][21] = P[5][21] + P[15][21]*SF[20] - P[0][21]*SPP[7] + P[1][21]*SPP[10] + P[2][21]*SPP[0];
nextP[6][21] = P[6][21] + P[3][21]*dt;
nextP[7][21] = P[7][21] + P[4][21]*dt;
nextP[8][21] = P[8][21] + P[5][21]*dt;
nextP[9][21] = P[9][21];
nextP[10][21] = P[10][21];
nextP[11][21] = P[11][21];
nextP[12][21] = P[12][21];
nextP[13][21] = P[13][21];
nextP[14][21] = P[14][21];
nextP[15][21] = P[15][21];
nextP[16][21] = P[16][21];
nextP[17][21] = P[17][21];
nextP[18][21] = P[18][21];
nextP[19][21] = P[19][21];
nextP[20][21] = P[20][21];
nextP[21][21] = P[21][21];
if (stateIndexLim > 21) {
nextP[0][22] = P[0][22]*SPP[5] - P[1][22]*SPP[4] + P[2][22]*SPP[8] + P[9][22]*SPP[22] + P[12][22]*SPP[18];
nextP[1][22] = P[1][22]*SPP[6] - P[0][22]*SPP[2] - P[2][22]*SPP[9] + P[10][22]*SPP[22] + P[13][22]*SPP[17];
nextP[2][22] = P[0][22]*SPP[14] - P[1][22]*SPP[3] + P[2][22]*SPP[13] + P[11][22]*SPP[22] + P[14][22]*SPP[16];
nextP[3][22] = P[3][22] + P[0][22]*SPP[1] + P[1][22]*SPP[19] + P[2][22]*SPP[15] - P[15][22]*SPP[21];
nextP[4][22] = P[4][22] + P[15][22]*SF[22] + P[0][22]*SPP[20] + P[1][22]*SPP[12] + P[2][22]*SPP[11];
nextP[5][22] = P[5][22] + P[15][22]*SF[20] - P[0][22]*SPP[7] + P[1][22]*SPP[10] + P[2][22]*SPP[0];
nextP[6][22] = P[6][22] + P[3][22]*dt;
nextP[7][22] = P[7][22] + P[4][22]*dt;
nextP[8][22] = P[8][22] + P[5][22]*dt;
nextP[9][22] = P[9][22];
nextP[10][22] = P[10][22];
nextP[11][22] = P[11][22];
nextP[12][22] = P[12][22];
nextP[13][22] = P[13][22];
nextP[14][22] = P[14][22];
nextP[15][22] = P[15][22];
nextP[16][22] = P[16][22];
nextP[17][22] = P[17][22];
nextP[18][22] = P[18][22];
nextP[19][22] = P[19][22];
nextP[20][22] = P[20][22];
nextP[21][22] = P[21][22];
nextP[22][22] = P[22][22];
nextP[0][23] = P[0][23]*SPP[5] - P[1][23]*SPP[4] + P[2][23]*SPP[8] + P[9][23]*SPP[22] + P[12][23]*SPP[18];
nextP[1][23] = P[1][23]*SPP[6] - P[0][23]*SPP[2] - P[2][23]*SPP[9] + P[10][23]*SPP[22] + P[13][23]*SPP[17];
nextP[2][23] = P[0][23]*SPP[14] - P[1][23]*SPP[3] + P[2][23]*SPP[13] + P[11][23]*SPP[22] + P[14][23]*SPP[16];
nextP[3][23] = P[3][23] + P[0][23]*SPP[1] + P[1][23]*SPP[19] + P[2][23]*SPP[15] - P[15][23]*SPP[21];
nextP[4][23] = P[4][23] + P[15][23]*SF[22] + P[0][23]*SPP[20] + P[1][23]*SPP[12] + P[2][23]*SPP[11];
nextP[5][23] = P[5][23] + P[15][23]*SF[20] - P[0][23]*SPP[7] + P[1][23]*SPP[10] + P[2][23]*SPP[0];
nextP[6][23] = P[6][23] + P[3][23]*dt;
nextP[7][23] = P[7][23] + P[4][23]*dt;
nextP[8][23] = P[8][23] + P[5][23]*dt;
nextP[9][23] = P[9][23];
nextP[10][23] = P[10][23];
nextP[11][23] = P[11][23];
nextP[12][23] = P[12][23];
nextP[13][23] = P[13][23];
nextP[14][23] = P[14][23];
nextP[15][23] = P[15][23];
nextP[16][23] = P[16][23];
nextP[17][23] = P[17][23];
nextP[18][23] = P[18][23];
nextP[19][23] = P[19][23];
nextP[20][23] = P[20][23];
nextP[21][23] = P[21][23];
nextP[22][23] = P[22][23];
nextP[23][23] = P[23][23];
}
}
// Copy upper diagonal to lower diagonal taking advantage of symmetry
for (uint8_t colIndex=0; colIndex<=stateIndexLim; colIndex++)
{
for (uint8_t rowIndex=0; rowIndexstate process noise variances
for (uint8_t i=0; i<=stateIndexLim; i++)
{
nextP[i][i] = nextP[i][i] + processNoise[i];
}
// if the total position variance exceeds 1e4 (100m), then stop covariance
// growth by setting the predicted to the previous values
// This prevent an ill conditioned matrix from occurring for long periods
// without GPS
if ((P[6][6] + P[7][7]) > 1e4f)
{
for (uint8_t i=6; i<=7; i++)
{
for (uint8_t j=0; j<=stateIndexLim; j++)
{
nextP[i][j] = P[i][j];
nextP[j][i] = P[j][i];
}
}
}
// copy covariances to output
CopyCovariances();
// constrain diagonals to prevent ill-conditioning
ConstrainVariances();
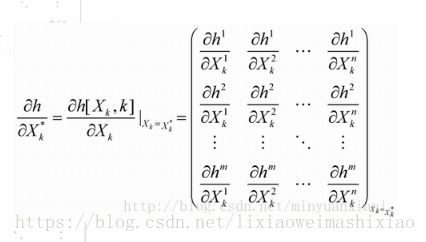
hal.util->perf_end(_perf_CovariancePrediction); 4.观测方程,求解H,得到观测方程,计算KG,得到估计值,更新P
%% derive equations for fusion of true airspeed measurements
load('StatePrediction.mat');
VtasPred = sqrt((vn-vwn)^2 + (ve-vwe)^2 + vd^2); % predicted measurement
H_TAS = jacobian(VtasPred,stateVector); % measurement Jacobian
H_TAS = subs(H_TAS, {'rotErrX', 'rotErrY', 'rotErrZ'}, {0,0,0});
[H_TAS,SH_TAS]=OptimiseAlgebra(H_TAS,'SH_TAS'); % optimise processing
K_TAS = (P*transpose(H_TAS))/(H_TAS*P*transpose(H_TAS) + R_TAS);
[K_TAS,SK_TAS]=OptimiseAlgebra(K_TAS,'SK_TAS'); % Kalman gain vector
% save equations and reset workspace
save('Airspeed.mat','SH_TAS','H_TAS','SK_TAS','K_TAS');
clear all;
reset(symengine);
%% derive equations for fusion of angle of sideslip measurements
load('StatePrediction.mat');
% calculate wind relative velocities in nav frame and rotate into body frame
Vbw = Tbn'*[(vn-vwn);(ve-vwe);vd];
% calculate predicted angle of sideslip using small angle assumption
BetaPred = Vbw(2)/Vbw(1);
H_BETA = jacobian(BetaPred,stateVector); % measurement Jacobian
H_BETA = subs(H_BETA, {'rotErrX', 'rotErrY', 'rotErrZ'}, {0,0,0});
[H_BETA,SH_BETA]=OptimiseAlgebra(H_BETA,'SH_BETA'); % optimise processing
K_BETA = (P*transpose(H_BETA))/(H_BETA*P*transpose(H_BETA) + R_BETA);[K_BETA,SK_BETA]=OptimiseAlgebra(K_BETA,'SK_BETA'); % Kalman gain vector
% save equations and reset workspace
save('Sideslip.mat','SH_BETA','H_BETA','SK_BETA','K_BETA');
clear all;
reset(symengine);
%% derive equations for fusion of magnetic field measurement
load('StatePrediction.mat');
magMeas = transpose(Tbn)*[magN;magE;magD] + [magX;magY;magZ]; % predicted measurement
H_MAG = jacobian(magMeas,stateVector); % measurement Jacobian
H_MAG = subs(H_MAG, {'rotErrX', 'rotErrY', 'rotErrZ'}, {0,0,0});
[H_MAG,SH_MAG]=OptimiseAlgebra(H_MAG,'SH_MAG');
K_MX = (P*transpose(H_MAG(1,:)))/(H_MAG(1,:)*P*transpose(H_MAG(1,:)) + R_MAG); % Kalman gain vector
[K_MX,SK_MX]=OptimiseAlgebra(K_MX,'SK_MX');
K_MY = (P*transpose(H_MAG(2,:)))/(H_MAG(2,:)*P*transpose(H_MAG(2,:)) + R_MAG); % Kalman gain vector
[K_MY,SK_MY]=OptimiseAlgebra(K_MY,'SK_MY');
K_MZ = (P*transpose(H_MAG(3,:)))/(H_MAG(3,:)*P*transpose(H_MAG(3,:)) + R_MAG); % Kalman gain vector
[K_MZ,SK_MZ]=OptimiseAlgebra(K_MZ,'SK_MZ');这部分太多还没看。。。。。