Ardupilot Pre-Arm安全检查程序分析
目录
- 目录
- 摘要
- 第一:Pre-Arm简介
- 第二:Pre-Arm报错需知
- 1.使用前准备
- 使用Pre-Arm信息分析不能解锁原因:
- 2.解锁失败的原因
- 3.解锁失败的原因(自己对照官网进行翻译)
- #1解锁前安全检查
- #2采用GCS识别是什么导致的Pre-Arm报错
- #3错误信息
-
-
- RC故障(即发射机/接收机故障):
- 气压计故障:
- 罗盘故障:
- GPS相关故障:
- INS检查(即加速度和陀螺检查):
- 供电检查:
- 参数检查:
-
-
- #3禁用解锁安全检查
- 1.使用前准备
- 第三:Pre-Arm报错代码分析
摘要
本节主要分析ardupilot多旋翼部分的Pre-Arm 安全检查程序,欢迎批评指正!!!
第一:Pre-Arm简介
Ardupilot:ArduCopter多旋翼 固件内部有一套非常完善的Pre-Arm安全检查提醒机制,会检查你的飞行器是否有大量问题,包括各种未校准,已经是否传感器已经出现损坏,当然这解锁检查机制也不是百分百可靠的,你可以通过在全部参数列表Arming-check 禁用它。
需要注意的是:
因为飞控固件版本的不断更新,有可能一些错误信息会有所改变,可能与本文出现不一致,或者本文没有说明的错误;都是正常情况。可以自行使用搜索引擎搜索一下
第二:Pre-Arm报错需知
1.使用前准备
使用GCS地面站(Missionplanner)查看Pre-Arm错误信息
在闪烁黄色灯时,使用者会无法解锁,而且解锁时蜂鸣器也会长鸣2下。此时你必须连接上地面站,才能排除究竟是什么问题导致了不能解锁和飞行,一般通常是 传感器未校准 或者出现了失控保护、低压设置不正确等等,下面会详细分析每种报错内容:
使用Pre-Arm信息分析不能解锁原因:
(1)飞控板已经连接好遥控器接收机,并 拆除螺旋桨 和动力电池(这个很重要!!!安全第一)
(2)通过USB或者数传连接上地面站(Mission Planner)
(3)打开你的遥控器,并试图解锁;解锁通道是:油门最低 (3通道)、YAW最右(4通道)(这个是apm默认的解锁方式)
(4)此时,在地面站窗口应该可以看见 红色 的Pre-Arm 错误提示, 如果没有任何提示 ,一般是 解锁通道不正确 导致飞控无法感知你的解锁操作;你还可以在地面站 飞行数据 界面-状态栏 点解锁操作.
2.解锁失败的原因
(1)遥控器常见问题
(2)电子罗盘常见问题

(3)GPS常见故障


(4)INS检查(例如加速计和陀螺仪检查)


以上主要参考雷迅资料:雷迅Pre-Arm解析
更重要的资料是官网:ardupilot官网Pre-Arm解析,雷迅纯属翻译
3.解锁失败的原因(自己对照官网进行翻译)
#1解锁前安全检查
(Pre-Arm Safety Check)
多旋翼无人机固件包括一套完整的安全解锁检查程序,以防止因一些故障,在无人机解锁后,导致安全问题;如果在无人机起飞前发现不管什么问题,包括传感器没有校准,配置或传感器数据不良等错误情况,都将禁止无人机起飞。这些检查有助于防止坠毁和飞行,但如果必要的话,当然我们可以通过参数设置,禁用安全检查设置,但是我个人感觉应该启用。(翻译中夹杂着个人理解)
#2采用GCS识别是什么导致的Pre-Arm报错
(Recognising which Pre-Arm Check has failed using the GCS)
飞行员应该注意到:如果解锁时发生安全检查失败,飞行员将无法解锁无人机,同时飞控伴随有LED闪烁黄色灯。因此应该准确的进行安全失败检查:
1.使用USB数据线或数传模块,将飞行控制器的数据连接到地面站。
2.确保GCS连接到无人机(即在任务平面上,点击右上角的连接”按钮”。
3.打开你的无线电遥控器发射机并试图解锁无人机(常规程序使用油门拉到最下面向下,偏航最右边)
4.解锁检查失败的原因将在HUD窗口中以红色显示。我们可以通过报错的原因进行分析什么原因导致解锁禁止。
#3错误信息
(Failure messages)
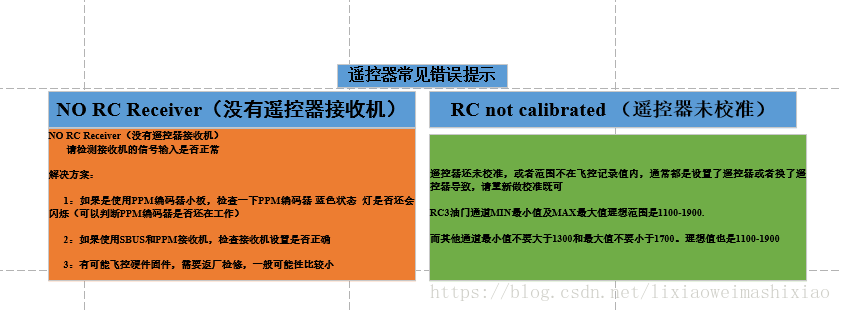
RC故障(即发射机/接收机故障):
RC not calibrated:无线电校准尚未执行。RC3_MIN和RC3_MAX必须已经从它们的默认值(1100和1900)更改,并且对于通道1到4,MIN值必须是1300或更小,MAX值必须是1700或更高。
气压计故障:
Baro not healthy :BARO不健康,气压计传感器报告它是不健康的,这通常是硬件故障的标志。
Alt disparity :(高度差),气压计高度与惯性导航(即机体气压计+加速度计)高度估计相差超过2米。该消息通常是短暂的,并且可以在飞行控制器首次插入时或者如果它接收到剧烈震动(即突然下降)时发生。如果不清楚,加速度计可能需要校准,或者可能存在气压计硬件问题。
罗盘故障:
Compass not healthy :罗盘不健康:指南针传感器报告它是不健康的,这是硬件故障的标志。
Compass not calibrated :罗盘尚未校准。COMPASS_OFS_X、Y、Z参数为零,或者自上次进行罗盘校准以来连接的罗盘的数量或类型已经改变。
Compass offsets too high :主罗盘的偏移长度(即SqRT(x^ 2 +y^ 2 +z ^ 2))大于500。这可能是由于金属物体太靠近指南针造成的。如果只使用内部罗盘(不推荐),那么可能只是板中的金属造成大的偏移,这实际上可能不是问题,在这种情况下,您可能希望禁用罗盘检查。
Check mag field : 该区域的感测磁场比预期值高35%或更低。预期长度为530,所以>874或<185。磁场强度在世界各地都有所不同,但是这些广泛的限制意味着罗盘校准更有可能没有计算出好的偏移量,应该重复。
Compasses inconsistent :罗盘方向不一致:内罗盘和外罗盘指向不同的方向(超过45度)。这通常是由外部罗盘方向(即地理,罗盘方向参数)设置不正确引起的。
GPS相关故障:
GPS Glitch :
GPS灯闪烁:GPS灯正在闪烁,并且无人机处于需要GPS模式(即留待模式、PosHold等)和/或启用圆形栅栏的飞行模式。
Need 3D Fix : GPS没有3D修复,并且无人机处于GPS模式和/或启用圆形栅栏的飞行模式。
Bad Velocity :无人机的速度(根据惯性导航系统)在50cm/s以上。可能导致这种情况的问题包括车辆实际移动或下降,不良的加速度计校准,GPS更新低于预期的5hz。
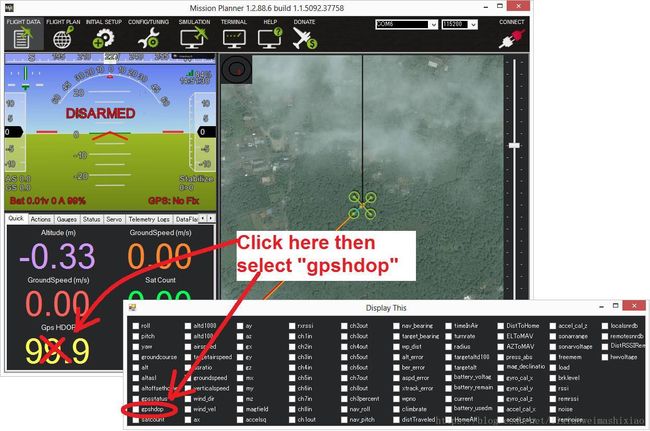
High GPS HDOP :**GPS的HDPP值(位置精度的值)高于2.0,并且车辆处于GPS定位模式和/或启用圆形栅栏的飞行模式。我们可以简单地等待几分钟、移动到具有更好的天空视图的位置或检查GPS干扰源(即FPV设备)从GPS移动得更远来解决。或者,可以通过修改增加**GPS_HDOP_GOOD参数为2.2或2.5来放松检查。最糟糕的情况是,飞行员在不需要GPS(即,稳定,AltHold)的模式下可以禁用围栏和起飞,并且在解锁后切换到Loiter,但这不被推荐。(太危险,一定要先进行GPS定位后,在起飞,这个时候三种模式可以选择)
**注意:**GPS HDOP可以通过任务规划人员的快速选项卡方便地查看,如下所示。
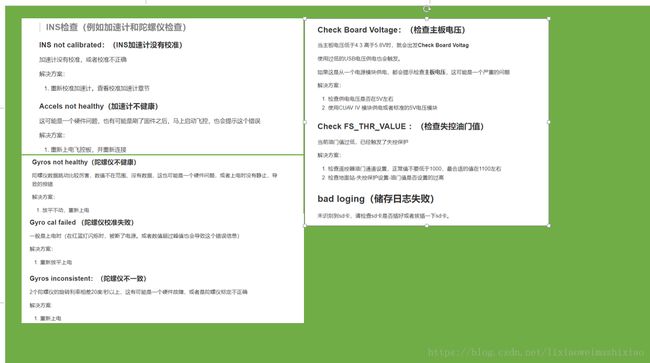
INS检查(即加速度和陀螺检查):
**INS not calibrated:**INS未校准:部分或全部加速度计的偏移量为零。加速度计需要校准。
Accels not healthy: ACCEL不健康:一个加速度计报告是不健康的,这可能是硬件问题。这也可以在重新启动板之前的固件更新之后立即发生。
Accels inconsistent: 加速度不一致:加速度计报告当前加速度至少为1M/s/s不同。加速度计需要重新校准或存在硬件问题。
Gyros not healthy: 陀螺仪不健康:一个陀螺仪报告它是不健康的,这可能是硬件问题。这也可以在重新启动板之前的固件更新之后立即发生。
Gyro cal failed: 陀螺仪校准失败:陀螺仪校准未能捕获偏移量。这是经常由无人机在陀螺仪校准期间移动(当红色和蓝色灯闪烁),在这种情况下,拔出电池,并再次插入,而小心不要移动无人机,可能会解决这个问题。传感器硬件故障(即尖峰)也会导致这种故障。
Gyros inconsistent: 陀螺仪不一致:两个陀螺仪报告的车辆旋转速率相差20dg/s以上。这可能是硬件故障或由陀螺仪校准不良造成的。
供电检查:
Board Voltage checks:检查供电板电压:电路板内部电压低于4.3伏或高于5.8伏。
如果通过USB数据线供电(即在工作台上),这可能是由于台式计算机无法提供足够的电流给飞行控制器-尝试更换USB数据线。
如果由电池供电,这是一个严重的问题,电力系统(即电源模块、电池等)应该在飞行前仔细检查。
参数检查:
Ch7&Ch8 Opt cannot be same:
Ch7&Ch8选项不能相同:辅助功能开关被设置为相同的选项,这是不允许的,因为它可能导致混乱。
Check FS_THR_VALUE: 遥控器故障安全PWM值,已被设置得太接近节气门通道(即CH3)最小值。
Check ANGLE_MAX:控制无人机的最大倾角的AGLE_MAX参数被设置在10度(即1000)以下或80度(即8000)以上。
**ACRO_BAL_ROLL/PITCH:**ACRO_BAL_ROLL参数高于稳定辊P和/或ACRO_BAL_PITCH参数高于稳定螺距P值。这可能导致操作者在ACRO模式下无法控制倾角,因为Acro训练器的稳定将超过操作者的输入。
#3禁用解锁安全检查
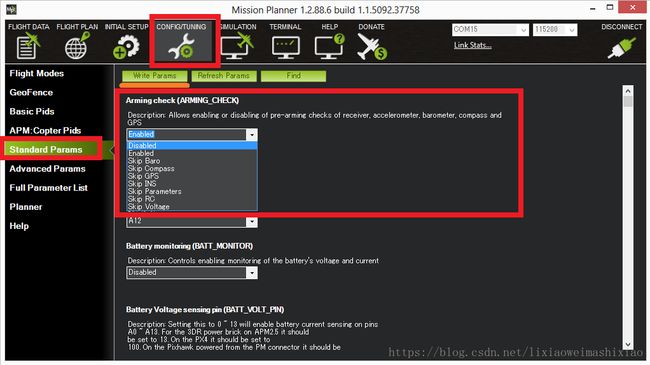
如果您确信预安全检查失败不是真正的问题,您可以通过以下方式禁用检查:
1.将飞行控制器连接到地面站mission planne 或者QGC
2.到MIssionplanner的配置/调整>标准PARAMS屏幕
3.将Arming Check下拉设置为“Disabled”或“Skip”选项之一,该选项可以更有效地跳过导致失败的项。
4.按下“写入参数”按钮
但是,理想情况下,您应该确定解锁前故障的原因,如果可以解决,则将解锁安全检查参数返回到“Enabled”。