OpenCV实现目标跟踪
使用opencv3以上在opencv_contib中集成的跟踪算法,实现目标跟踪
在这里选择使用摄像头画面进行跟踪
python代码如下:
import cv2
import sys
print cv2.__version__
if __name__ == '__main__' :
# Set up tracker.
# Instead of MIL, you can also use
tracker_types = ['BOOSTING', 'MIL','KCF', 'TLD', 'MEDIANFLOW', 'GOTURN']
tracker_type = tracker_types[2]
if tracker_type == 'BOOSTING':
tracker = cv2.TrackerBoosting_create()
if tracker_type == 'MIL':
tracker = cv2.TrackerMIL_create()
if tracker_type == 'KCF':
tracker = cv2.TrackerKCF_create()
if tracker_type == 'TLD':
tracker = cv2.TrackerTLD_create()
if tracker_type == 'MEDIANFLOW':
tracker = cv2.TrackerMedianFlow_create()
if tracker_type == 'GOTURN':
tracker = cv2.TrackerGOTURN_create()
# Read video
video = cv2.VideoCapture(0)
# Exit if video not opened.
if not video.isOpened():
print "Could not open video"
sys.exit()
# Read first frame.
ok, frame = video.read()
if not ok:
print 'Cannot read video file'
sys.exit()
# Define an initial bounding box
#bbox = (287, 23, 86, 320)
# Uncomment the line below to select a different bounding box
bbox = cv2.selectROI(frame, False)
# Initialize tracker with first frame and bounding box
ok = tracker.init(frame, bbox)
while True:
# Read a new frame
ok, frame = video.read()
if not ok:
break
# Start timer
timer = cv2.getTickCount()
# Update tracker
ok, bbox = tracker.update(frame)
# Calculate Frames per second (FPS)
fps = cv2.getTickFrequency() / (cv2.getTickCount() - timer);
# Draw bounding box
if ok:
# Tracking success
p1 = (int(bbox[0]), int(bbox[1]))
p2 = (int(bbox[0] + bbox[2]), int(bbox[1] + bbox[3]))
cv2.rectangle(frame, p1, p2, (255,0,0), 2, 1)
else :
# Tracking failure
cv2.putText(frame, "Tracking failure detected", (100,80), cv2.FONT_HERSHEY_SIMPLEX, 0.75,(0,0,255),2)
# Display tracker type on frame
cv2.putText(frame, tracker_type + " Tracker", (100,20), cv2.FONT_HERSHEY_SIMPLEX, 0.75, (50,170,50),2);
# Display FPS on frame
cv2.putText(frame, "FPS : " + str(int(fps)), (100,50), cv2.FONT_HERSHEY_SIMPLEX, 0.75, (50,170,50), 2);
# Display result
cv2.imshow("Tracking", frame)
# Exit if ESC pressed
k = cv2.waitKey(1) & 0xff
if k == 27 : break
c++代码如下:
#include
#include
#include
using namespace cv;
using namespace std;
// Convert to string
#define SSTR( x ) static_cast< std::ostringstream & >( \
( std::ostringstream() << std::dec << x ) ).str()
int main(int argc, char **argv)
{
// List of tracker types in OpenCV 3.2
// NOTE : GOTURN implementation is buggy and does not work.
string trackerTypes[6] = {"BOOSTING", "MIL", "KCF", "TLD","MEDIANFLOW", "GOTURN"};
// vector trackerTypes(types, std::end(types));
// Create a tracker
string trackerType = trackerTypes[2];
Ptr tracker;
#if (CV_MINOR_VERSION < 3)
{
tracker = Tracker::create(trackerType);
}
#else
{
if (trackerType == "BOOSTING")
tracker = TrackerBoosting::create();
if (trackerType == "MIL")
tracker = TrackerMIL::create();
if (trackerType == "KCF")
tracker = TrackerKCF::create();
if (trackerType == "TLD")
tracker = TrackerTLD::create();
if (trackerType == "MEDIANFLOW")
tracker = TrackerMedianFlow::create();
if (trackerType == "GOTURN")
tracker = TrackerGOTURN::create();
}
#endif
// Read video
VideoCapture video("videos/chaplin.mp4");
// Exit if video is not opened
if(!video.isOpened())
{
cout << "Could not read video file" << endl;
return 1;
}
// Read first frame
Mat frame;
bool ok = video.read(frame);
// Define initial boundibg box
Rect2d bbox(287, 23, 86, 320);
// Uncomment the line below to select a different bounding box
bbox = selectROI(frame, false);
// Display bounding box.
rectangle(frame, bbox, Scalar( 255, 0, 0 ), 2, 1 );
imshow("Tracking", frame);
tracker->init(frame, bbox);
while(video.read(frame))
{
// Start timer
double timer = (double)getTickCount();
// Update the tracking result
bool ok = tracker->update(frame, bbox);
// Calculate Frames per second (FPS)
float fps = getTickFrequency() / ((double)getTickCount() - timer);
if (ok)
{
// Tracking success : Draw the tracked object
rectangle(frame, bbox, Scalar( 255, 0, 0 ), 2, 1 );
}
else
{
// Tracking failure detected.
putText(frame, "Tracking failure detected", Point(100,80), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0,0,255),2);
}
// Display tracker type on frame
putText(frame, trackerType + " Tracker", Point(100,20), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(50,170,50),2);
// Display FPS on frame
putText(frame, "FPS : " + SSTR(int(fps)), Point(100,50), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(50,170,50), 2);
// Display frame.
imshow("Tracking", frame);
// Exit if ESC pressed.
int k = waitKey(1);
if(k == 27)
{
break;
}
}
}
在这里选择的是KCF跟踪方法,效果如下图所示:

注意:在选择goturn方法时会报错,提示找不到goturn.prototxt:
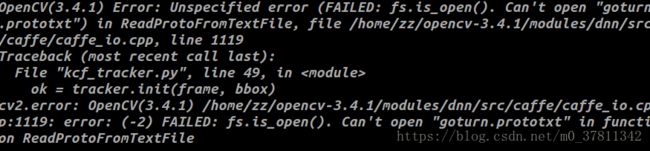
goturn.prototx和goturn.caffemode可以在这里下载。下载后将他们拷贝到/opencv_contrib-master/modules/tracking/src/下,并确保对opencv目录具有读写权限。
经过测试我个人认为KCF算法效果比较好。
参考链接:
https://blog.csdn.net/qq_40239482/article/details/79015635
http://answers.opencv.org/question/123871/where-to-place-the-pretrained-data-for-goturn-tracker/