自动驾驶公司调研
1. 自动驾驶公司排名
 领导者:通用、福特、Waymo、大众、戴姆勒-博世、雷诺日产联盟、安波福、宝马-英特尔-FCA
领导者:通用、福特、Waymo、大众、戴姆勒-博世、雷诺日产联盟、安波福、宝马-英特尔-FCA- 竞争者:沃尔沃-Autoliv-爱立信-Zenuity、PSA、Navya、百度-北汽、捷豹路虎、丰田、现代
- 挑战者:Uber、特斯拉、本田和苹果
2. 自动驾驶公司技术分析
2.1 Waymo
Waymo拥有最好的技术,现在只需要生产大量的汽车。
 waymo汽车
waymo汽车
 传感器分布
传感器分布

计算平台
感知:
激光雷达360°、视觉360°、雷达360°和补充传感器。
google自主激光雷达,短程高帧率、中距高分辨率、长距大范围。
计算平台:
计算平台采用英特尔的Xeon服务器芯片、Altera的FPGA和英特尔的以太网关芯片,体积小、性能强、功耗低、灵活性。
高精地图:
自主地图采集生成
仿真:
carcraft自主仿真平台
行为预测和规划:
基于仿真环境的网络训练,封闭道路和实际道路测试补充优化
测试:
仿真环境测试、封闭道路测试、实际道路测试
速度可达120kmph
安全:
备用的计算系统、制动系统、转向系统、电源系统、碰撞检测和碰撞规避系统,冗余IMU。
HMI:
良好的用户体验
架构总结:
没有详细的架构说明,硬件方面认为感知的视觉和激光雷达处理是深度学习FPGA处理,行为预测和规划处理是神经网络、控制芯片infineon;软件方面是alphabet系统,X86上跑的系统定制化linux可能性较大,加速卡上跑的系统定制化linux可能性较大,控制芯片上跑的系统QNX可能性较大,更细的方面考虑google强大的软件能力自成体系可能性较大。
2.2 GM cruise
已经准备好量产自动驾驶车辆,且全自动驾驶所需要的一切已就绪。



感知:
lidar:5个,检测静态和动态目标,收购的strobe公司将提供低成本先进产品
Camera:16个,检测跟踪行人、自行车、交通灯、可行驶区域
radar:21个,长距,检测车辆并测速;短距,检测车周围目标;链式,检测远距离大范围行驶车辆
计算平台:
双计算系统,主备模式
高精地图:
有高精地图,美国自采大部分高速公路,定位准确性是GPS的4-8倍,中国与高德合作
lidar和IMU多源定位
测试:
仿真环境测试、封闭道路测试、实际道路测试
目前车速是40kmph
安全:
多源定位、双电源、多重数据通路、双转向刹车和驱动系统、冗余碰撞检测。集成监控模块,取消了方向盘和踏板。
架构总结:
没有详细的架构说明,硬件方面感知的视觉和激光雷达处理是CNN,由于NVIDIA方面没有相关消息,FPGA方案可能性较大;软件方面朝通用化发展,适配各种车型,系统认为是定制化linux可能性较大。
2.3 戴姆勒博世

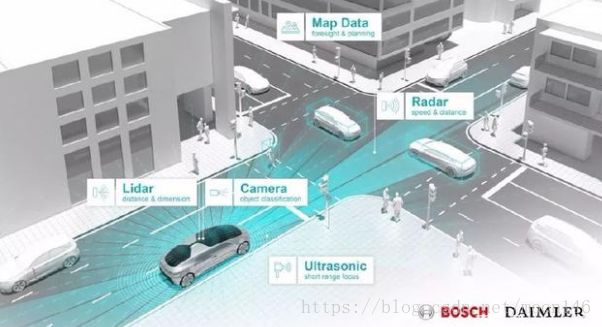

感知:
有传感器lidar、Camera、radar,无详细信息,视觉感知基于nvidia的深度学习方案
博世提供在开发工作中所需的组件,包括:传感器、执行器和控制单元等
计算平台:
英伟达为博世和戴姆勒提供人工智能算法平台,基于英伟达旗下全新自动驾驶平台Pegasus
包括:深度学习、传感器融合、图像识别、云计算等
高精地图:
有高精地图
行为预测和规划:
博世和戴姆勒为汽车行驶生成的人工智能(AI)算法。控制单元网络将来自所有传感器的数据与雷达、视频、激光雷达和超声波技术(传感器数据融合技术)进行比对评估,规划车辆的运动方式。
测试:
戴姆勒将驱动系统引入汽车,为测试车队提供必要的开发车辆和测试设施
架构总结:
硬件方面自动驾驶平台Pegasus;软件方面认为是定制化nvidia方案。
| 名称 |
DRIVE PX Pegasus |
Xavier AI Car SuperComputer |
DRIVE PX 2 (自动私人司机版本) |
DRIVE PX |
Tegra K1 (奥迪zFAS主控单元使用) |
| 浮点计算能力 (TFLOPS) |
- |
- |
8 |
约为2 |
约为0.5 |
| 深度学习计算能力 (DL TOPS) |
320 |
30 |
24 |
- |
- |
| 主芯片名称 (个) |
Tegra Xavier |
Tegra Xavier |
Tegra Parker |
Tegra X1 |
Tegra K1 |
| 主芯片数量 (个) |
2 |
1 |
2 |
2 |
1 |
| 系统集成 CPU核心数 (个) |
16 |
8 |
12 |
16 |
5 |
| 系统集成 GPU架构代号 |
Volta/Volta下一代产品 |
Volta |
Pascal |
Maxwell |
Kepler |
| 系统集成 GPU数量 |
4(2个Volta架构+2个Volta下一代架构) |
1 |
2 |
1 |
1 |
| 功耗 |
500W |
30W |
250W |
- |
- |
| 制程 |
16nm或更先进工艺 |
16nm |
16nm |
20nm |
28nm |
2.4 福特
将自动驾驶技术作为车联网技术的一部分



感知:
有传感器lidar、Camera、radar,无详细信息,视觉感知基于机器学习方案来自以色列的计算机视觉及机器学习公司 SAIPS。
高精地图:
有高精地图,基于激光雷达的SLAM
架构总结:
无详细资料,硬件方面自动驾驶平台融入V2X
 软件方面来自Argo AI的虚拟驾驶员系统
软件方面来自Argo AI的虚拟驾驶员系统
- 传感器 - LiDAR,相机和雷达
- 用于本地化和路径规划的算法
- 计算机视觉和机器学习
- 高度详细的 3D 地图
- 计算能力和电力保证正常工作
2.5 宝马
Intel mobileye的方案
感知:
Mobileye会提供EyeQ5计算机视觉处理器,负责处理和解释360度环视传感器的输入以及本地化。
计算平台:
英特尔提供本地高性能计算单元致强和凌动处理器,EyeQ5与Intel CPU和FPGA技术相结合,形成集成到自动驾驶汽车的中央计算平台。而且在本地平台之外,英特尔还会提供云端计算单元,包括5G互联平台及稳定并支持人工智能的数据中心平台。
高精地图:
有高精地图,与地图服务商HERE合作
安全:
宝马将负责驾驶控制和空气动力学,评估整体功能安全,负责整体集成并量产自动驾驶汽车。
架构总结:
无详细资料,硬件方面是基于intel和mobileye的方案,相关信息mobileye目前使用camera结合V2X的方案,软件方面会结合云端计算。三家公司希望把平台开源,宝马还将负责寻找愿意加入平台的合作伙伴。
2.6 Aptiv

感知:
lidar:10个(4个短距VLP16,6个长距ibeo4l)
camera:2个(1个三目,1个单目做交通灯)
radar:10个(4个短距,6个长距)
others:GPS、V2X(DSRC)
计算平台:
主备计算平台
架构总结:
无详细资料,硬件方面认为是X86平台结合V2X,软件方面系统认为是定制化linux。
2.7 PSA



感知:
有camera、毫米波雷达和超声波雷达,没有激光雷达
计算平台:
它结合了价格低廉的相机传感器和人工智能视觉处理,并在汽车后部装了一个带有英伟达图形处理单元的大型计算机。
高精地图:
仿真:
AIsim(一个虚拟仿真环境的游戏引擎)
架构总结:
硬件方面是nvidia平台
软件方面有三个套件Aldrive(自动驾驶套件)
AIsim(一个虚拟仿真环境的游戏引擎)
Aiware(自己的神经网络加速器 IP)
其中Aldrive(自动驾驶套件)由四个引擎构成,分别是:识别引擎(Recognition Engine)、定位引擎(Location Engine)、运动引擎(Motive Engine)和控制引擎(Control Engine)。
系统认为是定制化linux
2.8 comma.ai
1000美元自动驾驶方案,能够实现ACC和LKAS
一加手机Eon(699$)
适配器Panda(99$)
连接在CAN 总线向车辆发号施令的Giraffe单元(60$)


3. 百度apollo3.0系统分析
3.1产品系统架构
 |
3.2 apollo功能模块


3.3 各功能模块分层架构
 |
3.4 系统分层架构
 |
3.5 系统逻辑架构
3.5.1 perception
 |
3.5.2 localization
 |
3.5.3 prediction

3.5.4 routing

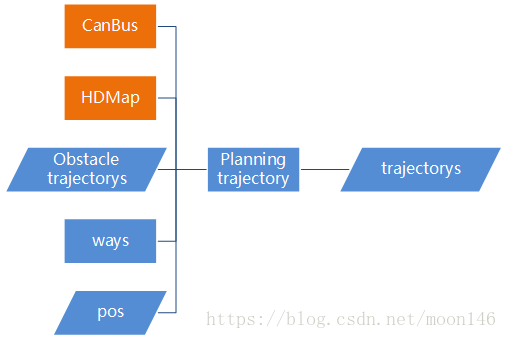
3.5.5 planning
3.5.6 control

3.5.7 canbus
 |
4 总结
感知:
所有的公司都使用camera和毫米波雷达,大多数公司使用激光雷达。
Camera必不可少,激光雷达也非常重要,它能够提供目标物的精确深度信息。Google和GM面向大规模量产和运营的公司很早就已经在布局激光雷达产品线,google已经用上了自主的激光雷达,GM也是在等strobe的产品大幅降低成本。激光雷达技术、产品成熟度和价格可能成为自动驾驶公司的分水岭。
环境感知的另一条路,V2X技术的引入是亮点。
虽然有多家自动驾驶公司开源,但是其机器学习网络都尚未开源,考虑属于核心知识产权。
计算平台:
随着Camera的广泛使用,而处理camera数据的机器学习对算力要求巨大,目前只有三种解决方案,GPU、FPGA和ASIC。GPU高功耗给散热和能量消耗带来问题,但是其算法成熟度高,硬件成本低。FPGA功耗比GPU低,配置灵活,但是懂机器学习算法的FPGA设计人才匮乏,硬件成本比GPU高。ASIC方案尚不成熟,中国有近上百家人工智能芯片创业公司,研发投入成本很大,算法成熟度不高,考虑地平线公司。
普通公司都使用GPU方案,可选择的有X86+GPU方案或者NVIDIA套片方案。
有钱有能力的公司如google使用 FPGA方案和自研ASIC方案。
百度公司使用GPU和FPGA方案。
出于安全考虑,L4级以上都会选择两套计算平台形成主备系统。
另外考虑5G部署完成后云端方案会开始流行。
高精地图:
所有自动驾驶公司都会选择使用高精地图,配合自主定位使用。高精地图可选择自主采集和同地图供应商合作的方式,中国的地图供应商有百度、四维、高德、光庭、创业公司momenta。自主定位方案有GPS(RTK)+IMU,激光雷达+高精地图,视觉信息+高精地图,出于安全考虑,L4级以上会选择多套方案进行多源融合。
仿真:
最好的是google的carcraft自主仿真平台,AImotive也不错,AImotive已经和上汽合作了。其他公司都应该在搭建自己的仿真平台,但成熟度是问题。
行为预测和规划:
前几名的公司多采用基于机器学习的方式做行为预测和规划,nvidia和comma.ai的方案是将行为预测和规划合为一体通过机器学习来解决,形成End2End方案。百度行为预测使用神经网络,规划使用栅格算法(A*)。
测试:
常见的三种,仿真环境测试、封闭道路测试、实际道路测试。目前实际道路测试google车最多速度最快,可达120kmph。
控制:
只有少数几家公开源码的可以看到实现,一般采用PID、LQR、MPC算法控制车辆跟踪规划模块输出轨迹行驶。
执行
线控单元只有车场和几家大零部件供应商可以提供,普通公司多采用已有线控车辆为基础研发,国内车厂能够提供线控车辆的不多,一般需要进行后期线控改装,集中在改装线控油门、线控转向和线控刹车。
安全:
L4级以上采用双计算系统、制动系统、转向系统、电源系统。执行单元的ECU选用ASIL D级别芯片。
HMI:
提供良好的用户体验,车内驾驶员信息采集、手机APP、座舱交互等等应用。
工程师需要的是调试用的显示、配置工具,百度有提供dreamview模块。