张量分解 (Tensor)
一般一维数组,称之为向量(vector),
二维数组,称之为矩阵(matrix);
三维数组以及多位数组,我们称之为张量(tensor)。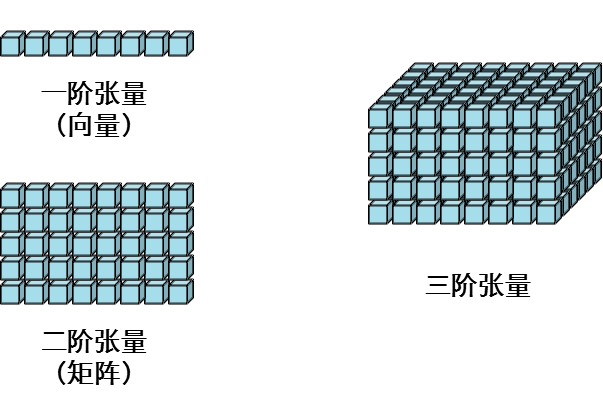
一、基本概念
矩阵补全(Matrix Completion)目的是为了估计矩阵中缺失的部分(不可观察的部分),可以看做是用矩阵X近似矩阵M,然后用X中的元素作为矩阵M中不可观察部分的元素的估计。
矩阵分解(Matrix Factorization)是指用 A*B 来近似矩阵M,那么 A*B 的元素就可以用于估计M中对应不可见位置的元素值,而A*B可以看做是M的分解,所以称作Matrix Factorization。
这是因为协同过滤本质上是考虑大量用户的偏好信息(协同),来对某一用户的偏好做出预测(过滤),那么当我们把这样的偏好用评分矩阵M表达后,这即等价于用M其他行的已知值(每一行包含一个用户对所有商品的已知评分),来估计并填充某一行的缺失值。若要对所有用户进行预测,便是填充整个矩阵,这是所谓“协同过滤本质是矩阵填充”。
那么,这里的矩阵填充如何来做呢?矩阵分解是一种主流方法。这是因为,协同过滤有一个隐含的重要假设,可简单表述为:如果用户A和用户B同时偏好商品X,那么用户A和用户B对其他商品的偏好性有更大的几率相似。这个假设反映在矩阵M上即是矩阵的低秩。极端情况之一是若所有用户对不同商品的偏好保持一致,那么填充完的M每行应两两相等,即秩为1。
所以这时我们可以对矩阵M进行低秩矩阵分解,用U*V来逼近M,以用于填充——对于用户数为m,商品数为n的情况,M是m*n的矩阵,U是m*r,V是r*n,其中r是人工指定的参数。这里利用M的低秩性,以秩为r的矩阵M’=U*V来近似M,用M’上的元素值来填充M上的缺失值,达到预测效果。
二、矩阵分解常用方法
Basic mf
Basic MF是最基础的分解方式,将评分矩阵R分解为用户矩阵U和项目矩阵S, 通过不断的迭代训练使得U和S的乘积越来越接近真实矩阵,矩阵分解过程如图: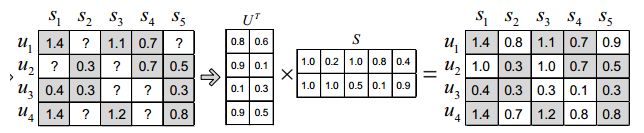
预测值接近真实值就是使其差最小,这是我们的目标函数,然后采用梯度下降的方式迭代计算U和S,它们收敛时就是分解出来的矩阵。我们用损失函数来表示误差(等价于目标函数): 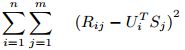
上式中R_ij是评分矩阵中已打分的值,U_i和S_j相当于未知变量。为求得公式1的最小值,相当于求关于U和S二元函数的最小值(极小值或许更贴切)。通常采用梯度下降的方法: 
依他 是学习速率,表示迭代的步长。其值为1.5时,通常以震荡形式接近极值点;若<1迭代单调趋向极值点;若>2围绕极值逐渐发散,不会收敛到极值点。具体取什么值要根据实验经验。
Regularized mf
正则化矩阵分解是Basic MF的优化,解决MF造成的过拟合问题。其不是直接最小化损失函数,而是在损失函数基础上增加规范化因子,将整体作为损失函数。 
红线表示正则化因子,在求解U和S时,仍然采用梯度下降法,此时迭代公式变为: 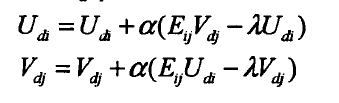
其中, 
梯度下降结束条件:f(x)的真实值和预测值小于自己设定的阈值
三、张量CP分解
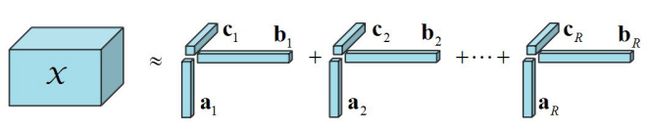
CP分解的张量形式:
将一个张量表示成有限个秩一张量之和,比如一个三阶张量可以分解为 ![]()
CP分解的矩阵形式:
因子矩阵:秩一张量中对应的向量组成的矩阵,如 ![]()
利用因子矩阵,一个三阶张量的CP分解可以写成展开形式 
CP分解的计算:
以一个三阶张量X为例,假定成分个数R已知,目标为: ![]()
作为ALS的一个子问题,固定B和C,求解A;固定A和C求解B;再固定B和C求解A。比如固定B和C,求解A如下: ![]()
得到: ![]()
再通过归一化分别求出A和![]()
四、张量Tucker分解
Tucker分解是一种高阶的主成分分析,它将一个张量表示成一个核心(core)张量沿每一个mode乘上一个矩阵。 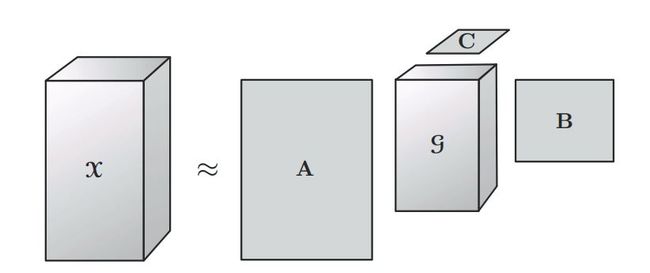
对于三阶张量 ![]() 来说,其Tucker分解为
来说,其Tucker分解为 ![]()
容易看出,CP分解是Tucker分解的一种特殊形式:如果核心张量是对角的,且P=Q=R,则Tucker分解就退化成了CP分解。
Tucker分解的矩阵形式
三阶Tucker分解的展开形式为 
Tucker分解可以推广到高阶张量 ![]()
![]()
Tucker分解的计算
HOSVD:利用SVD对每个mode做一次Tucker1分解(截断或者不截断)。HOSVD不能保证得到一个较好的近似,但HOSVD的结果可以作为一个其他迭代算法(如HOOI)的很好的初始解。
为了导出HOOI迭代算法,先考虑目标函数: 
从而![]() 应该满足
应该满足 ![]()
目标函数的平方变为: 
所以问题可以进行如下转化: 
利用交替求解的思想,问题变为解如下子问题: 
五、张量分解应用
问题描述:通过司机历史轨迹预测司机在某条轨迹的行驶时间。这里面有一个重要的问题,那就是数据稀疏性问题,因为司机不可能走过所有的道路,此时就用到张量分解。
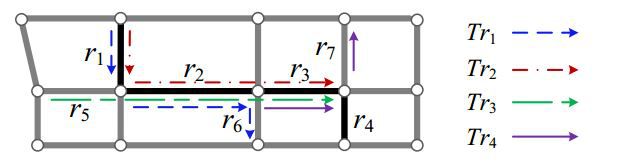
如上图,这里有四条轨迹,我们需要根据这几条轨迹,预测r1->r2->r3->r4这条轨迹的行驶时间,发现r4是没有走过的,此时就需要用某个方法预测出来。
构造一个三维张量:![]() 。张量的三个维度分别为:路段ID,时间段,司机。
。张量的三个维度分别为:路段ID,时间段,司机。
将张量分解为一个核心张量![]() ,和三个矩阵:
,和三个矩阵:![]()
选择用Tucker分解,目标函数如下:
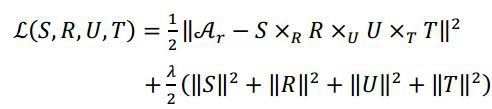
其中 是加的正则向,避免过拟合。
是加的正则向,避免过拟合。
因此,![]()
分解完整算法如下: 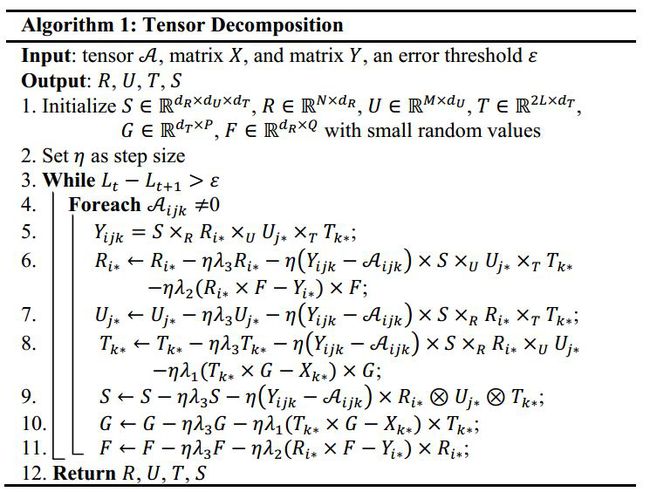
1、Tamara G. Kolda, Brett W. Bader .Tensor Decompositions and Applications
2、彭毅 张量分解(ppt)
3、Yilun Wang,Yu Zheng.Travel Time Estimation of a Path using Sparse Trajectories 2014 KDD