python 目标追踪
1. 传统的追踪方法
# opencv已经实现了的追踪算法
OPENCV_OBJECT_TRACKERS = {
"csrt": cv2.TrackerCSRT_create,
"kcf": cv2.TrackerKCF_create,
"boosting": cv2.TrackerBoosting_create,
"mil": cv2.TrackerMIL_create,
"tld": cv2.TrackerTLD_create,
"medianflow": cv2.TrackerMedianFlow_create,
"mosse": cv2.TrackerMOSSE_create
}import cv2
import numpy as np
cap = cv2.VideoCapture("./video/soccer_01.mp4")
trackers = cv2.MultiTracker()
while True:
_, frame = cap.read()
if frame is None:
break
frame = cv2.resize(frame, (600, int(frame.shape[0]*600/frame.shape[1])), cv2.INTER_AREA)
(success, boxes) = trackers.update(frame)
for box in boxes:
(x1, y1, w, h) = box
cv2.rectangle(frame, (int(x1), int(y1)), (int(x1+w), int(y1+h)), (0, 255, 0))
cv2.imshow("video", frame)
key = cv2.waitKey(100)
if key == ord('s'):
box = cv2.selectROI("video", frame, True, False)
trackers.add(cv2.TrackerKCF_create(), frame, box)
if key == 27:
break
cap.release()
cv2.destroyAllWindows()
Result:

2. 深度学习方法
引入caffe的SSD模型,对第一帧进行识别,结果如下:
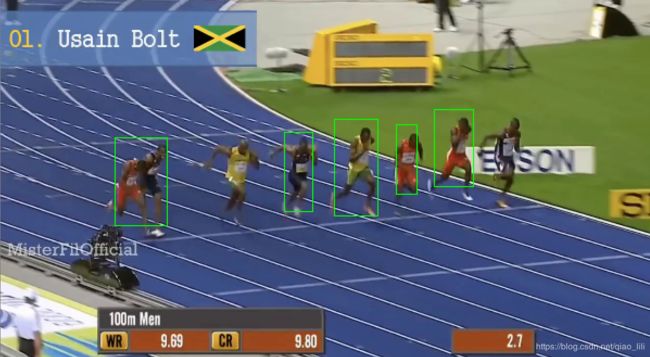
使用opencv的KCF追踪器进行追踪:所计算的帧率为3.8帧/s
%% FPS 计算帧率
import datetime
class FPS:
def __init__(self):
self._start = None
self._end = None
self._numFrames = 0
def start(self):
self._start = datetime.datetime.now()
return self
def stop(self):
self._end = datetime.datetime.now()
def update(self):
self._numFrames += 1
def elapsed(self):
return (self._end - self._start).total_seconds()
def fps(self):
return self._numFrames / self.elapsed()
import cv2
import numpy as np
from FPS import FPS
cap = cv2.VideoCapture('./video/race.mp4')
net = cv2.dnn.readNetFromCaffe("./model/MobileNetSSD_deploy.prototxt", "./model/MobileNetSSD_deploy.caffemodel")
# SSD标签
CLASSES = ["background", "aeroplane", "bicycle", "bird", "boat",
"bottle", "bus", "car", "cat", "chair", "cow", "diningtable",
"dog", "horse", "motorbike", "person", "pottedplant", "sheep",
"sofa", "train", "tvmonitor"]
tracker = []
tracker_cv = cv2.MultiTracker_create()
FPS_IMG = FPS()
FPS_IMG.start()
while True:
_, frame = cap.read()
if frame is None:
break
[h, w] = frame.shape[0:2]
dim = (600, int(h*600/w))
frame = cv2.resize(frame, dim, cv2.INTER_AREA)
[h, w] = frame.shape[:2]
if len(tracker) == 0:
blob = cv2.dnn.blobFromImage(frame, 0.007843, (600, int(h*600/w)), 125)
net.setInput(blob)
detections = net.forward()
# 不同的网络检测结果的存储形式不同
for i in np.arange(0, detections.shape[2]):
confidence = detections[0, 0, i, 2]
if confidence > 0.27:
idx = int(detections[0, 0, i, 1])
label = CLASSES[idx]
if label != 'person':
continue
# 计算该目标在图像中的位置
box = detections[0, 0, i, 3:7] * np.array([w, h, w, h])
[x1, y1, x2, y2] = box.astype('int')
tracker.append([x1, y1, x2, y2])
tracker_cv.add(cv2.TrackerKCF_create(), frame, (x1, y1, x2, y2))
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2, 8)
else:
(_, persons) = tracker_cv.update(frame)
for person in persons:
[x1, y1, x2, y2] = person
cv2.rectangle(frame, (int(x1), int(y1)), (int(x2), int(y2)), (0, 255, 0), 2, 8)
cv2.imshow("run", frame)
key = cv2.waitKey(1) & 0xFF
# 退出
if key == 27:
break
# 更新帧
FPS_IMG.update()
FPS_IMG.stop()
print(FPS_IMG.fps())
cap.release()
cv2.destroyAllWindows()值得注意的是SSD网络的数据形式:
for i in np.arange(0, detections.shape[2]): # 遍历所有的结果
confidence = detections[0, 0, i, 2]
if confidence > 0.27:
idx = int(detections[0, 0, i, 1])
label = CLASSES[idx]
if label != 'person':
continue
# 计算该目标在图像中的位置
box = detections[0, 0, i, 3:7] * np.array([w, h, w, h]) # 比例因子
[x1, y1, x2, y2] = box.astype('int')3. 采用多进程加速
# 调用多进程进行目标追踪
import cv2
import numpy as np
import multiprocessing
from FPS import FPS
def tracker_func(roi, frame, inputQueue, outputQueue):
t = cv2.TrackerKCF_create()
t.init(frame, roi)
while True:
img = inputQueue.get()
if img is not None:
_, pos = t.update(img)
startX = int(pos[0])
startY = int(pos[1])
endX = int(pos[2])
endY = int(pos[3])
# 把结果放到输出q
outputQueue.put((startX, startY, endX, endY))
CLASSES = ["background", "aeroplane", "bicycle", "bird", "boat", "bottle",
"bus", "car", "cat", "chair", "cow", "diningtable",
"dog", "horse", "motorbike", "person", "pottedplant", "sheep",
"sofa", "train", "tvmonitor"]
net = cv2.dnn.readNetFromCaffe("./model/MobileNetSSD_deploy.prototxt", "./model/MobileNetSSD_deploy.caffemodel")
cap = cv2.VideoCapture("./video/race.mp4")
FPS_IMG = FPS()
inputQueues = []
outputQueues = []
FPS_IMG.start()
if __name__ == '__main__':
while True:
_, frame = cap.read()
if frame is None:
break
[h, w] = frame.shape[:2]
ar = 600/w
h = int(ar*h)
frame = cv2.resize(frame, (w, h), cv2.INTER_AREA)
if len(inputQueues) == 0:
blob = cv2.dnn.blobFromImage(frame, 0.007843, (w, h), 127.5)
net.setInput(blob)
detections = net.forward()
for i in range(0, detections.shape[2]):
confidence = detections[0, 0, i, 2]
if confidence > 0.27:
idx = int(detections[0, 0, i, 1])
if CLASSES[idx] == "person":
box = detections[0, 0, i, 3:7] * np.array([w, h, w, h])
[startX, startY, endX, endY] = box.astype("int")
bb = (startX, startY, endX, endY)
# 多进程队列
iq = multiprocessing.Queue()
oq = multiprocessing.Queue()
inputQueues.append(iq)
outputQueues.append(oq)
# 多核
p = multiprocessing.Process(target=tracker_func, args=(bb, frame, iq, oq))
p.daemon = True
p.start()
cv2.rectangle(frame, (startX, startY), (endX, endY), (0, 255, 0), 2)
else:
for iq in inputQueues:
iq.put(frame)
for oq in outputQueues:
(startX, startY, endX, endY) = oq.get()
# 绘图
cv2.rectangle(frame, (startX, startY), (endX, endY), (0, 255, 0), 2)
cv2.imshow("Frame", frame)
key = cv2.waitKey(1) & 0xFF
if key == 27:
break
FPS_IMG.update()
FPS_IMG.stop()
print(FPS_IMG.fps())
cap.release()
cv2.destroyAllWindows()