- STM32 HAL库详解:跨系列兼容、CubeMX自动生成与回调机制全解析
景彡先生
STM32stm32嵌入式硬件单片机
前言:为什么HAL库成为STM32开发的主流?如果你接触过STM32开发,一定听说过“库”的概念。早期开发者需要直接操作寄存器,一行行写配置代码(如RCC->CR|=RCC_CR_HSEON),不仅效率低,还容易出错。后来ST推出了标准外设库(SPL),封装了寄存器操作,但存在一个致命问题:不跨系列——STM32F1的代码无法直接在STM32F4上运行,换芯片意味着重写大量代码。2014年,ST推
- stm32开发板ADC和USART配置DMA循环模式的本质区别
中少奇
stm32嵌入式硬件单片机
USART的DMA配置成循环模式时发送会不停的传输数据,接收时只有有数据时才会传输,否则挂起等待。而ADC的DMA配置成循环模式时只有ADC转换完成后才会自动触发DMA传输,不是一直在传输。1.触发机制的差异USART(持续触发)USART的DMA传输由硬件事件持续驱动:发送时:当TX数据寄存器为空(TXE标志),DMA会立即填充新数据,形成不间断传输循环。接收时:当RX数据寄存器非
- STM32 开发笔记:从环境搭建到任务调度
嵌入式的小萌新
stm32笔记嵌入式硬件
今天体验了一把augment确实好用,记录一下STM32开发笔记:从环境搭建到任务调度️环境准备必需工具STM32CubeMX:图形化配置工具,用于初始化MCU外设和生成基础代码STM32CubeCLT:包含编译工具链(arm-none-eabi-gcc)和烧录工具(STM32_Programmer_CLI)CMake:跨平台构建系统,用于管理项目编译流程OpenOCD:开源调试器(可选,用于DA
- 基于STM32设计的智能喂养系统(ESP8266+微信小程序)175
DS小龙哥
智能家居与物联网项目实战stm32微信小程序嵌入式硬件智能喂养系统投喂系统
基于STM32设计的牛羊喂养系统(微信小程序)(175)文章目录一、前言1.1项目介绍【1】项目功能介绍【2】项目硬件模块组成【3】ESP8266工作模式配置【4】上位机开发【5】项目模块划分1.2项目功能需求1.3项目开发背景1.4开发工具的选择1.5系统框架图1.6系统原理图1.7硬件实物图二、硬件选型2.1STM32开发板2.3PCB板2.4蜂鸣器模块2.5USB下载线2.6水位传感器(2个
- STM32开发方式及基本介绍
相关推荐STM32新建一个工程STM32的开发有三种方式1.寄存器版本2.库函数版本3.HAL库版本一、库函数开发与寄存器开发的关系很多人都是从学51单片机转而想进一步学习STM32,他们习惯了51单片机的寄存器开发方式,ST官方库摆在面前会不知道从何下手。其实简单来说,固件库就是函数的集合,固件库函数的作用是向下负责与寄存器直接打交道,向上提供用户函数调用的接口。举一个例子来解释STM32固件库
- STM32要学到什么程度才算合格?
作为一个在嵌入式领域摸爬滚打了近10年的老兵,看到这个问题时我的内心五味杂陈。"合格"这两个字说起来轻松,但要真正定义清楚却不是件容易的事。我记得当年24岁刚从机械专业被调剂到电子专业开始接触STM32的时候,也曾经无数次地问过自己:我到底学到什么程度才算入门?什么时候才能说自己"会"STM32了?什么时候才能在简历上自信地写下"精通STM32"?那时候的我拿着人生第一块STM32开发板——一块S
- 基于STM32开发的智能花园灌溉系统
STM32发烧友
stm32嵌入式硬件单片机
目录引言环境准备工作硬件准备软件安装与配置系统设计系统架构硬件连接代码实现系统初始化土壤湿度监测与处理灌溉控制与状态指示Wi-Fi通信与远程监控应用场景家庭花园智能灌溉农业田地的智能灌溉管理常见问题及解决方案常见问题解决方案结论1.引言随着智能家居技术的发展,智能花园灌溉系统逐渐成为家庭园艺和农业生产中提高水资源利用效率的重要工具。该系统通过集成土壤湿度传感器、雨滴传感器、Wi-Fi模块等硬件,实
- STM32入门教程:红外遥控应用
MyM满满
stm32单片机嵌入式硬件
STM32入门教程:红外遥控应用一、介绍红外遥控是现代电子产品中广泛应用的一项技术,通过红外线的收发实现设备之间的通信和控制。在本教程中,我们将使用STM32微控制器实现一个简单的红外遥控应用。主要内容包括红外遥控器的编码与解码,以及STM32的红外接收与发送功能的使用。二、硬件准备为了完成这个项目,我们需要以下硬件:STM32开发板(例如STM32F103C8T6)红外遥控器红外接收模块(例如红
- 改变pwm的频率和占空比的两种方式
杰杰桀桀桀
stm32单片机
前言以下内容仅代表个人观点,基于有限的经验和认知整理而成。每个人的视角和背景不同,观点难免存在差异或局限。若存在疏漏或不足之处,欢迎指正与探讨,但请多一份包容。希望通过这些思考,能激发更多有益的交流。——观点无高下,讨论有温度改变pwm的频率和占空比的两种方式STM32定时器配置:直接操作寄存器vsHAL库函数详解引言在STM32开发中,定时器配置是嵌入式系统设计的核心技能之一。开发人员常面临一个
- PCB设计教程【大师篇】——STM32开发板原理图设计(电源部分)
岂是尔等觊觎
#PCB设计教程stm32嵌入式硬件单片机经验分享学习智能硬件pcb工艺
前言本教程基于B站Expert电子实验室的PCB设计教学的整理,为个人学习记录,旨在帮助PCB设计新手入门。所有内容仅作学习交流使用,无任何商业目的。若涉及侵权,请随时联系,将会立即处理目录前言1.工程创建与前期设置2.电源模块设计输入接口与防反接保护DC-DC降压与电源合路LDO降压与指示灯3.操作要点与资源分享1.工程创建与前期设置新建工程:打开立创EDA专业版(建议使用最新版本,示例为V2.
- STM32开发GCC常用编译选项
is0815
stm32
-c和-o是GCC编译器最常用的两个选项,下面是它们的具体含义和配合使用说明:✅-c:只编译,不链接告诉编译器只将.c或.cpp文件编译为目标文件.o不进行链接,不生成最终可执行文件作用:用于构建大型项目的中间目标文件,适合配合Makefile。✅-o:指定输出文件名控制输出文件的名称可以用于.o文件,也可以用于最终的可执行文件它们配合使用的典型方式:gcc-cmain.c-omain.o含义:m
- STM32学习笔记:IIC接口使用深度解析
爱睡觉的王宇昊
STM32stm32学习笔记
一、引言:嵌入式世界的“神经末梢”I²C(Inter-IntegratedCircuit)总线由飞利浦(现恩智浦)于1982年设计,已成为低速设备通信的工业标准。在STM32开发中,IIC因仅需两根线即可连接128个设备(7位地址)的特性,被广泛用于传感器、EEPROM、RTC等外设。本文将带您从协议本质出发,深入剖析STM32硬件IIC与软件模拟方案,并分享解决总线锁死、时序配置等核心难题的实战
- STM32的OLED显示程序亲测可用:适用于多种场景的稳定显示解决方案
惠凯忱Montague
STM32的OLED显示程序亲测可用:适用于多种场景的稳定显示解决方案【下载地址】STM32的OLED显示程序亲测可用这是一套专为STM32设计的OLED显示程序,经过实际测试,运行稳定可靠。支持多种OLED屏幕尺寸和类型,提供丰富的显示效果,包括文字、图形和图标等。程序结构清晰,易于阅读和维护,内置详细注释,帮助开发者快速理解代码逻辑。只需下载程序文件,导入STM32开发环境,调整参数后即可编译
- PCB设计教程【大师篇】——STM32开发板原理图设计(单片机最小系统)
岂是尔等觊觎
#PCB设计教程stm32嵌入式硬件单片机pcb工艺学习经验分享智能硬件
前言本教程基于B站Expert电子实验室的PCB设计教学的整理,为个人学习记录,旨在帮助PCB设计新手入门。所有内容仅作学习交流使用,无任何商业目的。若涉及侵权,请随时联系,将会立即处理目录前言一、准备工作与元件放置二、引脚处理与网络标签添加三、外围电路设计四、启动模式与引脚引出五、电路整理与优化一、准备工作与元件放置设置原理图尺寸:将原理图尺寸改为A3,便于清晰展示电路。放置STM32芯片:在元
- 学习STM32的水位传感器
粉绿色的西瓜大大
学习stm32单片机
STM32是一款广泛应用于嵌入式系统开发的微控制器,具有强大的处理能力和丰富的外设接口。水位传感器是一种用于测量液体水位高度的传感器,常用于水池、水箱、水泵等应用中。本文将介绍如何学习STM32的水位传感器内容,并提供详细的代码案例。硬件准备首先,我们需要准备以下硬件组件:STM32开发板(例如STM32F103C8T6)水位传感器(可以选择压电传感器、浮球传感器等)杜邦线(用于连接传感器和开发板
- ST官方强推的HAL库竟是性能杀手?STM32三大库隐藏真相大揭秘!
外星猪猪
stm32嵌入式硬件单片机
嵌入式开发的三大“武器库”,90%的工程师都踩过坑!在STM32开发中,标准外设库(SPL)、硬件抽象层库(HAL)和底层库(LL)是开发者绕不开的三大核心工具。然而,面对不同项目需求与开发场景,如何选择最合适的库?本文将从底层原理、性能对比、适用场景和混合开发策略四大维度,为你深度解析这三大库的优劣与实战技巧。一、三大库的底层原理与核心差异1.标准库(SPL):寄存器的直接操控者标准库诞生于ST
- STM32开发 -- PMIC、I2C详解
聚优致成
stm32库开发实战指南
如需转载请注明出处:https://juyou.blog.csdn.net/article/details/103391329终于到PMIC了,这部分有用到I2C,之前一直想讲来着,现在正好一并讲了。S5PV210开发–I2C你知道多少?(一)S5PV210开发–I2C你知道多少?(二)S5PV210开发–I2C你知道多少?(三)Hi3516A开发–i2ctools安装和使用
- MLX90614红外测温传感器编程实战:STM32实现
咸鱼豆腐
本文还有配套的精品资源,点击获取简介:介绍MLX90614红外热电堆传感器与STM32微控制器结合进行温度测量的测试代码详解。MLX90614传感器具有高精度的温度读取功能,适用于健康监测、工业自动化和智能家居等场景。本教程涵盖如何通过STM32调整传感器反射率参数,利用I²C接口获取温度数据,并进行数据处理与显示。实践项目包含在STM32开发板上实现对MLX90614的实时温度监控,并根据应用需
- STM32入门教程——按键控制LED&光敏传感器控制蜂鸣器
岂是尔等觊觎
#STM32入门教程stm32嵌入式硬件单片机学习经验分享笔记智能硬件
前言本教材基于B站江协科技课程整理,适合有C语言基础、刚接触STM32的新手。它梳理了STM32核心知识点,帮助大家把C语言知识应用到STM32开发中,更高效地开启STM32学习之旅。目录前言一、硬件接线与模块化编程概述二、LED驱动模块开发初始化配置功能函数封装三、按键驱动模块开发初始化配置按键检测逻辑四、主函数调用与功能实现模块化调用流程扩展应用:光敏传感器与蜂鸣器五、开发要点总结GPIO操作
- 上位机图像处理和嵌入式模块部署(mcu开发注意事项)
嵌入式-老费
单片机嵌入式硬件
【声明:版权所有,欢迎转载,请勿用于商业用途。联系信箱:
[email protected]】mcu的种类很多,生产的厂家很多。这里面有进口的,有国产的,并且国产替代的趋势越来越明显。但是,不管是进口,还是国产,使用方法都大同小异。除了硬件之外,软件开发的基本流程上面,也是几乎感觉不到区别。如果同学们在之前的开发过程当中,已经有了stm32开发的经验,那么几乎可以很快切到其他厂家的mcu上面去。
- STM32开发笔记96: 在PlatformIO中更改外部晶振频率
snmplink
#STM32快速开发STM32开发笔记PlatformIO外部晶振频率
单片机型号:STM32F091RCT6低于PlatformIO开发平台,如果更改外部晶振频率,需修正stm32f0xx_hal_conf.h文件,原先使用keil开发时,此文件和项目相关,可以单独修改,但是在PlatformIO平台上,则此文件的路径如下:自己多次尝试屏蔽此文件,包括删除,都没有成功,实在没有方法,只能在此文件中,直接更改,代码如下:/*######################
- 基于STM32设计的便携式心电信号监测系统_146
DS小龙哥
智能家居与物联网项目实战stm32嵌入式硬件单片机便携式心电信号监测
基于STM32设计的便携式心电信号监测系统文章目录一、设计需求1.1项目背景1.2研究内容1.3系统基本方案【1】心率传感器部分【2】数据的接收与转换【3】单片机处理1.4需求总结1.5开发工具的选择1.6参考文献1.7市场调研1.6参考文献二、硬件选型2.1脉搏传感器(2个)2.2母对母杜邦线2.3HC05蓝牙模块2.4PCB板2.5STM32开发板2.6OLED显示屏2.7USB下载线三、An
- 如何使用stm32制作四轴飞行器
Clown爱电脑
stm32单片机嵌入式硬件
如果要使用STM32制作四轴飞行器,首先需要获取STM32开发板,并且安装相应的开发环境。然后需要准备电机、控制器、传感器和遥控器等部件,并将其连接到开发板上。最后,需要编写相应的程序,控制四轴飞行器的运行。
- 学习STM32的物联网云平台
棂梓知识
学习stm32物联网
STM32是一款非常强大的微控制器,常用于物联网设备的开发。本文将详细介绍如何使用STM32结合物联网云平台进行开发,并给出代码案例和详细说明。准备工作首先,需要准备以下工具和资源:STM32开发板:例如STM32F103C8T6USB转串口模块:用于将开发板与电脑连接物联网云平台账号:例如阿里云、腾讯云等硬件连接将STM32开发板与电脑连接,通过USB转串口模块将开发板的串口连接到电脑的USB接
- linux上编译stm32工程,Linux下如何搭建stm32开发环境
你不学固体物理吗
linux上编译stm32工程
原标题:Linux下如何搭建stm32开发环境Linux对于开发者来说真的是一个非常好的系统,为开发者来说应该不陌生,通常我们在Windows下开发stm32很方便,有非常多的工具,IDE等支持,同样是操作系统,Linux开发STM32也一点不会差。本文引用地址:http://www.eepw.com.cn/article/201608/295191.htmLinux下开发stm32也有很多方法:
- STM32入门教程:WiFi通信
MyM满满
stm32单片机嵌入式硬件
STM32入门教程:WiFi通信一、准备工作在开始进行STM32的WiFi通信之前,我们需要完成以下准备工作:STM32开发板:选择一款带有WiFi模块的STM32开发板,例如STM32F4Discovery。确保已经正确安装好开发板的驱动程序。WiFi模块:连接到STM32开发板的WiFi模块,例如ESP8266。开发环境:搭建好用于开发STM32的IDE,例如KeilMDK。WiFi库:下载并
- STM32入门教程:智能马桶盖控制
xiaoalla
stm32单片机嵌入式硬件
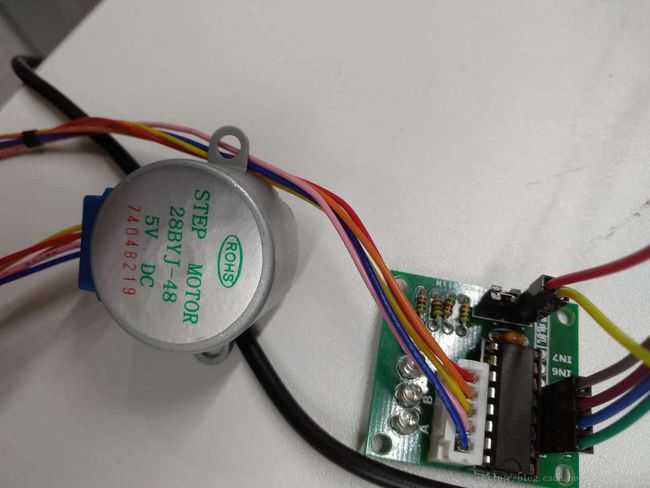
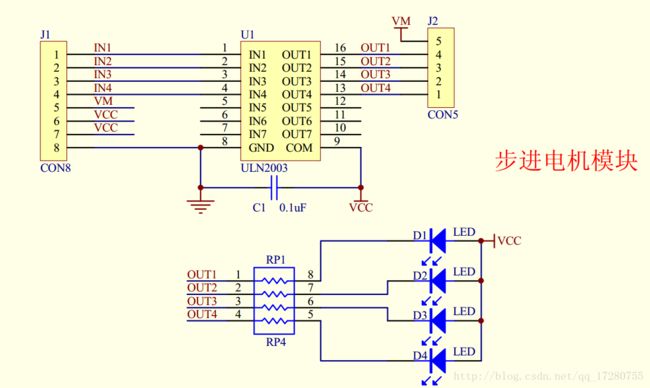
STM32入门教程:智能马桶盖控制引言:智能马桶盖是一种能够通过电机控制开关和温度传感器来提供自动控制和温度调节功能的设备。本教程将使用STM32单片机来实现智能马桶盖的控制,并通过代码案例的形式详细介绍实现过程。目录:硬件准备STM32开发环境配置端口初始化和配置电机控制温度传感器读取控制逻辑实现总结硬件准备:为了完成本教程,我们需要以下硬件组件:STM32开发板L298N电机驱动模块步进电机和
- STM32 __main
GodKK老神灭
STM32stm32单片机
STM32开发中__main与用户main()函数的本质区别及工作机制在STM32开发中,__main和用户定义的main()函数是启动过程中的两个关键节点,分别承担运行时初始化和用户程序入口的职责。以下是它们的核心差异及协作机制:一、定义与层级差异__main函数定位:属于C/C++运行时库的初始化入口,由编译器自动生成,开发者不可见。作用:完成从加载域(Flash)到执行域(RAM)的代码和数
- 深入探索STM32:入门指南与实战项目
2022物联网应用技术2班覃鑫磊
stm32嵌入式硬件单片机
一、引言STM32的发展历程为何选择STM32系列:性能对比、应用领域二、STM32架构简介ARMCortex-M处理器核心内存结构:Flash、RAM和EEPROMGPIO接口和外设模块三、STM32开发环境设置KeilMDK或IDEA介绍安装步骤与配置示例代码演示(初始化过程)四、STM32基础功能示例LED闪烁教程PWM信号生成ADC和DAC的应用五、高级特性探讨动态内存管理六、实战项目演示
- STM32 位带操作:解锁高效寄存器控制的 “隐藏技能”
apolloyhl
stm32stm32嵌入式硬件单片机
引言大家好!又到了技术分享时刻!在STM32开发的道路上,相信不少小伙伴和我一样,曾被寄存器操作“折磨”得苦不堪言:复杂的配置逻辑、晦涩难懂的代码、令人头疼的移植问题,每一项都让开发效率大打折扣。不过别担心,今天要分享的Cortex-M3架构中的位带操作技术,堪称解决这些痛点的“神器”!掌握这项技能,能让你的代码瞬间变得简洁高效,接下来就和我一起揭开它的神秘面纱吧!位带操作概念究竟什么是位带操作?
- 项目中 枚举与注解的结合使用
飞翔的马甲
javaenumannotation
前言:版本兼容,一直是迭代开发头疼的事,最近新版本加上了支持新题型,如果新创建一份问卷包含了新题型,那旧版本客户端就不支持,如果新创建的问卷不包含新题型,那么新旧客户端都支持。这里面我们通过给问卷类型枚举增加自定义注解的方式完成。顺便巩固下枚举与注解。
一、枚举
1.在创建枚举类的时候,该类已继承java.lang.Enum类,所以自定义枚举类无法继承别的类,但可以实现接口。
- 【Scala十七】Scala核心十一:下划线_的用法
bit1129
scala
下划线_在Scala中广泛应用,_的基本含义是作为占位符使用。_在使用时是出问题非常多的地方,本文将不断完善_的使用场景以及所表达的含义
1. 在高阶函数中使用
scala> val list = List(-3,8,7,9)
list: List[Int] = List(-3, 8, 7, 9)
scala> list.filter(_ > 7)
r
- web缓存基础:术语、http报头和缓存策略
dalan_123
Web
对于很多人来说,去访问某一个站点,若是该站点能够提供智能化的内容缓存来提高用户体验,那么最终该站点的访问者将络绎不绝。缓存或者对之前的请求临时存储,是http协议实现中最核心的内容分发策略之一。分发路径中的组件均可以缓存内容来加速后续的请求,这是受控于对该内容所声明的缓存策略。接下来将讨web内容缓存策略的基本概念,具体包括如如何选择缓存策略以保证互联网范围内的缓存能够正确处理的您的内容,并谈论下
- crontab 问题
周凡杨
linuxcrontabunix
一: 0481-079 Reached a symbol that is not expected.
背景:
*/5 * * * * /usr/IBMIHS/rsync.sh
- 让tomcat支持2级域名共享session
g21121
session
tomcat默认情况下是不支持2级域名共享session的,所有有些情况下登陆后从主域名跳转到子域名会发生链接session不相同的情况,但是只需修改几处配置就可以了。
打开tomcat下conf下context.xml文件
找到Context标签,修改为如下内容
如果你的域名是www.test.com
<Context sessionCookiePath="/path&q
- web报表工具FineReport常用函数的用法总结(数学和三角函数)
老A不折腾
Webfinereport总结
ABS
ABS(number):返回指定数字的绝对值。绝对值是指没有正负符号的数值。
Number:需要求出绝对值的任意实数。
示例:
ABS(-1.5)等于1.5。
ABS(0)等于0。
ABS(2.5)等于2.5。
ACOS
ACOS(number):返回指定数值的反余弦值。反余弦值为一个角度,返回角度以弧度形式表示。
Number:需要返回角
- linux 启动java进程 sh文件
墙头上一根草
linuxshelljar
#!/bin/bash
#初始化服务器的进程PId变量
user_pid=0;
robot_pid=0;
loadlort_pid=0;
gateway_pid=0;
#########
#检查相关服务器是否启动成功
#说明:
#使用JDK自带的JPS命令及grep命令组合,准确查找pid
#jps 加 l 参数,表示显示java的完整包路径
#使用awk,分割出pid
- 我的spring学习笔记5-如何使用ApplicationContext替换BeanFactory
aijuans
Spring 3 系列
如何使用ApplicationContext替换BeanFactory?
package onlyfun.caterpillar.device;
import org.springframework.beans.factory.BeanFactory;
import org.springframework.beans.factory.xml.XmlBeanFactory;
import
- Linux 内存使用方法详细解析
annan211
linux内存Linux内存解析
来源 http://blog.jobbole.com/45748/
我是一名程序员,那么我在这里以一个程序员的角度来讲解Linux内存的使用。
一提到内存管理,我们头脑中闪出的两个概念,就是虚拟内存,与物理内存。这两个概念主要来自于linux内核的支持。
Linux在内存管理上份为两级,一级是线性区,类似于00c73000-00c88000,对应于虚拟内存,它实际上不占用
- 数据库的单表查询常用命令及使用方法(-)
百合不是茶
oracle函数单表查询
创建数据库;
--建表
create table bloguser(username varchar2(20),userage number(10),usersex char(2));
创建bloguser表,里面有三个字段
&nbs
- 多线程基础知识
bijian1013
java多线程threadjava多线程
一.进程和线程
进程就是一个在内存中独立运行的程序,有自己的地址空间。如正在运行的写字板程序就是一个进程。
“多任务”:指操作系统能同时运行多个进程(程序)。如WINDOWS系统可以同时运行写字板程序、画图程序、WORD、Eclipse等。
线程:是进程内部单一的一个顺序控制流。
线程和进程
a. 每个进程都有独立的
- fastjson简单使用实例
bijian1013
fastjson
一.简介
阿里巴巴fastjson是一个Java语言编写的高性能功能完善的JSON库。它采用一种“假定有序快速匹配”的算法,把JSON Parse的性能提升到极致,是目前Java语言中最快的JSON库;包括“序列化”和“反序列化”两部分,它具备如下特征:
- 【RPC框架Burlap】Spring集成Burlap
bit1129
spring
Burlap和Hessian同属于codehaus的RPC调用框架,但是Burlap已经几年不更新,所以Spring在4.0里已经将Burlap的支持置为Deprecated,所以在选择RPC框架时,不应该考虑Burlap了。
这篇文章还是记录下Burlap的用法吧,主要是复制粘贴了Hessian与Spring集成一文,【RPC框架Hessian四】Hessian与Spring集成
- 【Mahout一】基于Mahout 命令参数含义
bit1129
Mahout
1. mahout seqdirectory
$ mahout seqdirectory
--input (-i) input Path to job input directory(原始文本文件).
--output (-o) output The directory pathna
- linux使用flock文件锁解决脚本重复执行问题
ronin47
linux lock 重复执行
linux的crontab命令,可以定时执行操作,最小周期是每分钟执行一次。关于crontab实现每秒执行可参考我之前的文章《linux crontab 实现每秒执行》现在有个问题,如果设定了任务每分钟执行一次,但有可能一分钟内任务并没有执行完成,这时系统会再执行任务。导致两个相同的任务在执行。
例如:
<?
//
test
.php
- java-74-数组中有一个数字出现的次数超过了数组长度的一半,找出这个数字
bylijinnan
java
public class OcuppyMoreThanHalf {
/**
* Q74 数组中有一个数字出现的次数超过了数组长度的一半,找出这个数字
* two solutions:
* 1.O(n)
* see <beauty of coding>--每次删除两个不同的数字,不改变数组的特性
* 2.O(nlogn)
* 排序。中间
- linux 系统相关命令
candiio
linux
系统参数
cat /proc/cpuinfo cpu相关参数
cat /proc/meminfo 内存相关参数
cat /proc/loadavg 负载情况
性能参数
1)top
M:按内存使用排序
P:按CPU占用排序
1:显示各CPU的使用情况
k:kill进程
o:更多排序规则
回车:刷新数据
2)ulimit
ulimit -a:显示本用户的系统限制参
- [经营与资产]保持独立性和稳定性对于软件开发的重要意义
comsci
软件开发
一个软件的架构从诞生到成熟,中间要经过很多次的修正和改造
如果在这个过程中,外界的其它行业的资本不断的介入这种软件架构的升级过程中
那么软件开发者原有的设计思想和开发路线
- 在CentOS5.5上编译OpenJDK6
Cwind
linuxOpenJDK
几番周折终于在自己的CentOS5.5上编译成功了OpenJDK6,将编译过程和遇到的问题作一简要记录,备查。
0. OpenJDK介绍
OpenJDK是Sun(现Oracle)公司发布的基于GPL许可的Java平台的实现。其优点:
1、它的核心代码与同时期Sun(-> Oracle)的产品版基本上是一样的,血统纯正,不用担心性能问题,也基本上没什么兼容性问题;(代码上最主要的差异是
- java乱码问题
dashuaifu
java乱码问题js中文乱码
swfupload上传文件参数值为中文传递到后台接收中文乱码 在js中用setPostParams({"tag" : encodeURI( document.getElementByIdx_x("filetag").value,"utf-8")});
然后在servlet中String t
- cygwin很多命令显示command not found的解决办法
dcj3sjt126com
cygwin
cygwin很多命令显示command not found的解决办法
修改cygwin.BAT文件如下
@echo off
D:
set CYGWIN=tty notitle glob
set PATH=%PATH%;d:\cygwin\bin;d:\cygwin\sbin;d:\cygwin\usr\bin;d:\cygwin\usr\sbin;d:\cygwin\us
- [介绍]从 Yii 1.1 升级
dcj3sjt126com
PHPyii2
2.0 版框架是完全重写的,在 1.1 和 2.0 两个版本之间存在相当多差异。因此从 1.1 版升级并不像小版本间的跨越那么简单,通过本指南你将会了解两个版本间主要的不同之处。
如果你之前没有用过 Yii 1.1,可以跳过本章,直接从"入门篇"开始读起。
请注意,Yii 2.0 引入了很多本章并没有涉及到的新功能。强烈建议你通读整部权威指南来了解所有新特性。这样有可能会发
- Linux SSH免登录配置总结
eksliang
ssh-keygenLinux SSH免登录认证Linux SSH互信
转载请出自出处:http://eksliang.iteye.com/blog/2187265 一、原理
我们使用ssh-keygen在ServerA上生成私钥跟公钥,将生成的公钥拷贝到远程机器ServerB上后,就可以使用ssh命令无需密码登录到另外一台机器ServerB上。
生成公钥与私钥有两种加密方式,第一种是
- 手势滑动销毁Activity
gundumw100
android
老是效仿ios,做android的真悲催!
有需求:需要手势滑动销毁一个Activity
怎么办尼?自己写?
不用~,网上先问一下百度。
结果:
http://blog.csdn.net/xiaanming/article/details/20934541
首先将你需要的Activity继承SwipeBackActivity,它会在你的布局根目录新增一层SwipeBackLay
- JavaScript变换表格边框颜色
ini
JavaScripthtmlWebhtml5css
效果查看:http://hovertree.com/texiao/js/2.htm代码如下,保存到HTML文件也可以查看效果:
<html>
<head>
<meta charset="utf-8">
<title>表格边框变换颜色代码-何问起</title>
</head>
<body&
- Kafka Rest : Confluent
kane_xie
kafkaRESTconfluent
最近拿到一个kafka rest的需求,但kafka暂时还没有提供rest api(应该是有在开发中,毕竟rest这么火),上网搜了一下,找到一个Confluent Platform,本文简单介绍一下安装。
这里插一句,给大家推荐一个九尾搜索,原名叫谷粉SOSO,不想fanqiang谷歌的可以用这个。以前在外企用谷歌用习惯了,出来之后用度娘搜技术问题,那匹配度简直感人。
环境声明:Ubu
- Calender不是单例
men4661273
单例Calender
在我们使用Calender的时候,使用过Calendar.getInstance()来获取一个日期类的对象,这种方式跟单例的获取方式一样,那么它到底是不是单例呢,如果是单例的话,一个对象修改内容之后,另外一个线程中的数据不久乱套了吗?从试验以及源码中可以得出,Calendar不是单例。
测试:
Calendar c1 =
- 线程内存和主内存之间联系
qifeifei
java thread
1, java多线程共享主内存中变量的时候,一共会经过几个阶段,
lock:将主内存中的变量锁定,为一个线程所独占。
unclock:将lock加的锁定解除,此时其它的线程可以有机会访问此变量。
read:将主内存中的变量值读到工作内存当中。
load:将read读取的值保存到工作内存中的变量副本中。
- schedule和scheduleAtFixedRate
tangqi609567707
javatimerschedule
原文地址:http://blog.csdn.net/weidan1121/article/details/527307
import java.util.Timer;import java.util.TimerTask;import java.util.Date;
/** * @author vincent */public class TimerTest {
- erlang 部署
wudixiaotie
erlang
1.如果在启动节点的时候报这个错 :
{"init terminating in do_boot",{'cannot load',elf_format,get_files}}
则需要在reltool.config中加入
{app, hipe, [{incl_cond, exclude}]},
2.当generate时,遇到:
ERROR