CGAN-条件生成式对抗网络(附源代码,可以直接运行)
简介
所谓CGAN,就是conditional Gan,针对GAN本身不可控的缺点,加入监督信息,指导GAN网络进行生成。关于GAN,可以参考这篇博客,GAN算法讲解。
不同之处
CGAN和GAN唯一不同处就是,CGAN是在条件下的概率,y就是加入的监督信息,比如说MNIST数据集可以提供数字label信息,人脸生成可以提供性别、是否微笑、年龄等信息。从下面的公式可以看出,CGAN和GAN几乎相同。


实验
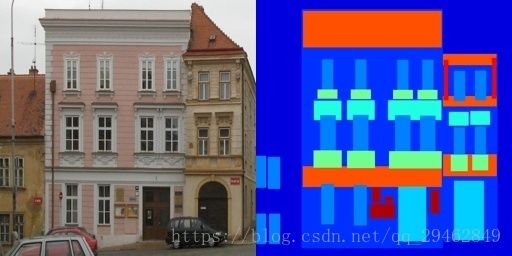
在这里通过图像翻译的例子,来具体说明CGAN是怎么工作的。如下图所示,通过CGAN网络来把右边图像转换成左边真实图像。(数据集包含在源代码中)
源代码
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import tensorflow as tf
import numpy as np
import argparse
import os
import json
import glob
import random
import collections
import math
import time
#所有的参数在这里设置修改
parser = argparse.ArgumentParser()
parser.add_argument("--input_dir", default="C:/Users/new/Desktop/chapter_9/tools/facades/val")
parser.add_argument("--mode", default="test")
parser.add_argument("--output_dir", default="facades_test")
parser.add_argument("--seed", type=int)
parser.add_argument("--checkpoint", default="facades_train")
parser.add_argument("--max_steps", type=int, help="number of training steps (0 to disable)")
parser.add_argument("--max_epochs", type=int,default=10)
parser.add_argument("--summary_freq", type=int, default=100, help="update summaries every summary_freq steps")
parser.add_argument("--progress_freq", type=int, default=50, help="display progress every progress_freq steps")
parser.add_argument("--trace_freq", type=int, default=0, help="trace execution every trace_freq steps")
parser.add_argument("--display_freq", type=int, default=0, help="write current training images every display_freq steps")
parser.add_argument("--save_freq", type=int, default=5000, help="save model every save_freq steps, 0 to disable")
parser.add_argument("--aspect_ratio", type=float, default=1.0, help="aspect ratio of output images (width/height)")
parser.add_argument("--lab_colorization", action="store_true", help="split input image into brightness (A) and color (B)")
parser.add_argument("--batch_size", type=int, default=1, help="number of images in batch")
parser.add_argument("--which_direction", type=str, default="BtoA", choices=["AtoB", "BtoA"])
parser.add_argument("--ngf", type=int, default=64, help="number of generator filters in first conv layer")
parser.add_argument("--ndf", type=int, default=64, help="number of discriminator filters in first conv layer")
parser.add_argument("--scale_size", type=int, default=286, help="scale images to this size before cropping to 256x256")
parser.add_argument("--flip", dest="flip", action="store_true", help="flip images horizontally")
parser.add_argument("--no_flip", dest="flip", action="store_false", help="don't flip images horizontally")
parser.set_defaults(flip=True)
parser.add_argument("--lr", type=float, default=0.0002, help="initial learning rate for adam")
parser.add_argument("--beta1", type=float, default=0.5, help="momentum term of adam")
parser.add_argument("--l1_weight", type=float, default=100.0, help="weight on L1 term for generator gradient")
parser.add_argument("--gan_weight", type=float, default=1.0, help="weight on GAN term for generator gradient")
# export options
parser.add_argument("--output_filetype", default="png", choices=["png", "jpeg"])
a = parser.parse_args()
EPS = 1e-12
CROP_SIZE = 256
Examples = collections.namedtuple("Examples", "paths, inputs, targets, count, steps_per_epoch")
Model = collections.namedtuple("Model", "outputs, predict_real, predict_fake, discrim_loss, discrim_grads_and_vars, gen_loss_GAN, gen_loss_L1, gen_grads_and_vars, train")
def preprocess(image):
with tf.name_scope("preprocess"):
# [0, 1] => [-1, 1]
return image * 2 - 1
def deprocess(image):
with tf.name_scope("deprocess"):
# [-1, 1] => [0, 1]
return (image + 1) / 2
def preprocess_lab(lab):
with tf.name_scope("preprocess_lab"):
L_chan, a_chan, b_chan = tf.unstack(lab, axis=2)
# L_chan: black and white with input range [0, 100]
# a_chan/b_chan: color channels with input range ~[-110, 110], not exact
# [0, 100] => [-1, 1], ~[-110, 110] => [-1, 1]
return [L_chan / 50 - 1, a_chan / 110, b_chan / 110]
def deprocess_lab(L_chan, a_chan, b_chan):
with tf.name_scope("deprocess_lab"):
# this is axis=3 instead of axis=2 because we process individual images but deprocess batches
return tf.stack([(L_chan + 1) / 2 * 100, a_chan * 110, b_chan * 110], axis=3)
def augment(image, brightness):
# (a, b) color channels, combine with L channel and convert to rgb
a_chan, b_chan = tf.unstack(image, axis=3)
L_chan = tf.squeeze(brightness, axis=3)
lab = deprocess_lab(L_chan, a_chan, b_chan)
rgb = lab_to_rgb(lab)
return rgb
def conv(batch_input, out_channels, stride):
with tf.variable_scope("conv"):
in_channels = batch_input.get_shape()[3]
filter = tf.get_variable("filter", [4, 4, in_channels, out_channels], dtype=tf.float32, initializer=tf.random_normal_initializer(0, 0.02))
# [batch, in_height, in_width, in_channels], [filter_width, filter_height, in_channels, out_channels]
# => [batch, out_height, out_width, out_channels]
padded_input = tf.pad(batch_input, [[0, 0], [1, 1], [1, 1], [0, 0]], mode="CONSTANT")
conv = tf.nn.conv2d(padded_input, filter, [1, stride, stride, 1], padding="VALID")
return conv
def lrelu(x, a):
with tf.name_scope("lrelu"):
# adding these together creates the leak part and linear part
# then cancels them out by subtracting/adding an absolute value term
# leak: a*x/2 - a*abs(x)/2
# linear: x/2 + abs(x)/2
# this block looks like it has 2 inputs on the graph unless we do this
x = tf.identity(x)
return (0.5 * (1 + a)) * x + (0.5 * (1 - a)) * tf.abs(x)
def batchnorm(input):
with tf.variable_scope("batchnorm"):
# this block looks like it has 3 inputs on the graph unless we do this
input = tf.identity(input)
channels = input.get_shape()[3]
offset = tf.get_variable("offset", [channels], dtype=tf.float32, initializer=tf.zeros_initializer())
scale = tf.get_variable("scale", [channels], dtype=tf.float32, initializer=tf.random_normal_initializer(1.0, 0.02))
mean, variance = tf.nn.moments(input, axes=[0, 1, 2], keep_dims=False)
variance_epsilon = 1e-5
normalized = tf.nn.batch_normalization(input, mean, variance, offset, scale, variance_epsilon=variance_epsilon)
return normalized
def deconv(batch_input, out_channels):
with tf.variable_scope("deconv"):
batch, in_height, in_width, in_channels = [int(d) for d in batch_input.get_shape()]
filter = tf.get_variable("filter", [4, 4, out_channels, in_channels], dtype=tf.float32, initializer=tf.random_normal_initializer(0, 0.02))
# [batch, in_height, in_width, in_channels], [filter_width, filter_height, out_channels, in_channels]
# => [batch, out_height, out_width, out_channels]
conv = tf.nn.conv2d_transpose(batch_input, filter, [batch, in_height * 2, in_width * 2, out_channels], [1, 2, 2, 1], padding="SAME")
return conv
def check_image(image):
assertion = tf.assert_equal(tf.shape(image)[-1], 3, message="image must have 3 color channels")
with tf.control_dependencies([assertion]):
image = tf.identity(image)
if image.get_shape().ndims not in (3, 4):
raise ValueError("image must be either 3 or 4 dimensions")
# make the last dimension 3 so that you can unstack the colors
shape = list(image.get_shape())
shape[-1] = 3
image.set_shape(shape)
return image
# based on https://github.com/torch/image/blob/9f65c30167b2048ecbe8b7befdc6b2d6d12baee9/generic/image.c
def rgb_to_lab(srgb):
with tf.name_scope("rgb_to_lab"):
srgb = check_image(srgb)
srgb_pixels = tf.reshape(srgb, [-1, 3])
with tf.name_scope("srgb_to_xyz"):
linear_mask = tf.cast(srgb_pixels <= 0.04045, dtype=tf.float32)
exponential_mask = tf.cast(srgb_pixels > 0.04045, dtype=tf.float32)
rgb_pixels = (srgb_pixels / 12.92 * linear_mask) + (((srgb_pixels + 0.055) / 1.055) ** 2.4) * exponential_mask
rgb_to_xyz = tf.constant([
# X Y Z
[0.412453, 0.212671, 0.019334], # R
[0.357580, 0.715160, 0.119193], # G
[0.180423, 0.072169, 0.950227], # B
])
xyz_pixels = tf.matmul(rgb_pixels, rgb_to_xyz)
# https://en.wikipedia.org/wiki/Lab_color_space#CIELAB-CIEXYZ_conversions
with tf.name_scope("xyz_to_cielab"):
# convert to fx = f(X/Xn), fy = f(Y/Yn), fz = f(Z/Zn)
# normalize for D65 white point
xyz_normalized_pixels = tf.multiply(xyz_pixels, [1/0.950456, 1.0, 1/1.088754])
epsilon = 6/29
linear_mask = tf.cast(xyz_normalized_pixels <= (epsilon**3), dtype=tf.float32)
exponential_mask = tf.cast(xyz_normalized_pixels > (epsilon**3), dtype=tf.float32)
fxfyfz_pixels = (xyz_normalized_pixels / (3 * epsilon**2) + 4/29) * linear_mask + (xyz_normalized_pixels ** (1/3)) * exponential_mask
# convert to lab
fxfyfz_to_lab = tf.constant([
# l a b
[ 0.0, 500.0, 0.0], # fx
[116.0, -500.0, 200.0], # fy
[ 0.0, 0.0, -200.0], # fz
])
lab_pixels = tf.matmul(fxfyfz_pixels, fxfyfz_to_lab) + tf.constant([-16.0, 0.0, 0.0])
return tf.reshape(lab_pixels, tf.shape(srgb))
def lab_to_rgb(lab):
with tf.name_scope("lab_to_rgb"):
lab = check_image(lab)
lab_pixels = tf.reshape(lab, [-1, 3])
# https://en.wikipedia.org/wiki/Lab_color_space#CIELAB-CIEXYZ_conversions
with tf.name_scope("cielab_to_xyz"):
# convert to fxfyfz
lab_to_fxfyfz = tf.constant([
# fx fy fz
[1/116.0, 1/116.0, 1/116.0], # l
[1/500.0, 0.0, 0.0], # a
[ 0.0, 0.0, -1/200.0], # b
])
fxfyfz_pixels = tf.matmul(lab_pixels + tf.constant([16.0, 0.0, 0.0]), lab_to_fxfyfz)
# convert to xyz
epsilon = 6/29
linear_mask = tf.cast(fxfyfz_pixels <= epsilon, dtype=tf.float32)
exponential_mask = tf.cast(fxfyfz_pixels > epsilon, dtype=tf.float32)
xyz_pixels = (3 * epsilon**2 * (fxfyfz_pixels - 4/29)) * linear_mask + (fxfyfz_pixels ** 3) * exponential_mask
# denormalize for D65 white point
xyz_pixels = tf.multiply(xyz_pixels, [0.950456, 1.0, 1.088754])
with tf.name_scope("xyz_to_srgb"):
xyz_to_rgb = tf.constant([
# r g b
[ 3.2404542, -0.9692660, 0.0556434], # x
[-1.5371385, 1.8760108, -0.2040259], # y
[-0.4985314, 0.0415560, 1.0572252], # z
])
rgb_pixels = tf.matmul(xyz_pixels, xyz_to_rgb)
# avoid a slightly negative number messing up the conversion
rgb_pixels = tf.clip_by_value(rgb_pixels, 0.0, 1.0)
linear_mask = tf.cast(rgb_pixels <= 0.0031308, dtype=tf.float32)
exponential_mask = tf.cast(rgb_pixels > 0.0031308, dtype=tf.float32)
srgb_pixels = (rgb_pixels * 12.92 * linear_mask) + ((rgb_pixels ** (1/2.4) * 1.055) - 0.055) * exponential_mask
return tf.reshape(srgb_pixels, tf.shape(lab))
def load_examples():
if a.input_dir is None or not os.path.exists(a.input_dir):
raise Exception("input_dir does not exist")
input_paths = glob.glob(os.path.join(a.input_dir, "*.jpg"))
decode = tf.image.decode_jpeg
if len(input_paths) == 0:
input_paths = glob.glob(os.path.join(a.input_dir, "*.png"))
decode = tf.image.decode_png
if len(input_paths) == 0:
raise Exception("input_dir contains no image files")
def get_name(path):
name, _ = os.path.splitext(os.path.basename(path))
return name
# if the image names are numbers, sort by the value rather than asciibetically
# having sorted inputs means that the outputs are sorted in test mode
if all(get_name(path).isdigit() for path in input_paths):
input_paths = sorted(input_paths, key=lambda path: int(get_name(path)))
else:
input_paths = sorted(input_paths)
with tf.name_scope("load_images"):
path_queue = tf.train.string_input_producer(input_paths, shuffle=a.mode == "train")
reader = tf.WholeFileReader()
paths, contents = reader.read(path_queue)
raw_input = decode(contents)
raw_input = tf.image.convert_image_dtype(raw_input, dtype=tf.float32)
assertion = tf.assert_equal(tf.shape(raw_input)[2], 3, message="image does not have 3 channels")
with tf.control_dependencies([assertion]):
raw_input = tf.identity(raw_input)
raw_input.set_shape([None, None, 3])
if a.lab_colorization:
# load color and brightness from image, no B image exists here
lab = rgb_to_lab(raw_input)
L_chan, a_chan, b_chan = preprocess_lab(lab)
a_images = tf.expand_dims(L_chan, axis=2)
b_images = tf.stack([a_chan, b_chan], axis=2)
else:
# break apart image pair and move to range [-1, 1]
width = tf.shape(raw_input)[1] # [height, width, channels]
a_images = preprocess(raw_input[:,:width//2,:])
b_images = preprocess(raw_input[:,width//2:,:])
if a.which_direction == "AtoB":
inputs, targets = [a_images, b_images]
elif a.which_direction == "BtoA":
inputs, targets = [b_images, a_images]
else:
raise Exception("invalid direction")
# synchronize seed for image operations so that we do the same operations to both
# input and output images
seed = random.randint(0, 2**31 - 1)
def transform(image):
r = image
if a.flip:
r = tf.image.random_flip_left_right(r, seed=seed)
# area produces a nice downscaling, but does nearest neighbor for upscaling
# assume we're going to be doing downscaling here
r = tf.image.resize_images(r, [a.scale_size, a.scale_size], method=tf.image.ResizeMethod.AREA)
offset = tf.cast(tf.floor(tf.random_uniform([2], 0, a.scale_size - CROP_SIZE + 1, seed=seed)), dtype=tf.int32)
if a.scale_size > CROP_SIZE:
r = tf.image.crop_to_bounding_box(r, offset[0], offset[1], CROP_SIZE, CROP_SIZE)
elif a.scale_size < CROP_SIZE:
raise Exception("scale size cannot be less than crop size")
return r
with tf.name_scope("input_images"):
input_images = transform(inputs)
with tf.name_scope("target_images"):
target_images = transform(targets)
paths_batch, inputs_batch, targets_batch = tf.train.batch([paths, input_images, target_images], batch_size=a.batch_size)
steps_per_epoch = int(math.ceil(len(input_paths) / a.batch_size))
return Examples(
paths=paths_batch,
inputs=inputs_batch,
targets=targets_batch,
count=len(input_paths),
steps_per_epoch=steps_per_epoch,
)
def create_generator(generator_inputs, generator_outputs_channels):
layers = []
# encoder_1: [batch, 256, 256, in_channels] => [batch, 128, 128, ngf]
with tf.variable_scope("encoder_1"):
output = conv(generator_inputs, a.ngf, stride=2)
layers.append(output)
layer_specs = [
a.ngf * 2, # encoder_2: [batch, 128, 128, ngf] => [batch, 64, 64, ngf * 2]
a.ngf * 4, # encoder_3: [batch, 64, 64, ngf * 2] => [batch, 32, 32, ngf * 4]
a.ngf * 8, # encoder_4: [batch, 32, 32, ngf * 4] => [batch, 16, 16, ngf * 8]
a.ngf * 8, # encoder_5: [batch, 16, 16, ngf * 8] => [batch, 8, 8, ngf * 8]
a.ngf * 8, # encoder_6: [batch, 8, 8, ngf * 8] => [batch, 4, 4, ngf * 8]
a.ngf * 8, # encoder_7: [batch, 4, 4, ngf * 8] => [batch, 2, 2, ngf * 8]
a.ngf * 8, # encoder_8: [batch, 2, 2, ngf * 8] => [batch, 1, 1, ngf * 8]
]
for out_channels in layer_specs:
with tf.variable_scope("encoder_%d" % (len(layers) + 1)):
rectified = lrelu(layers[-1], 0.2)
# [batch, in_height, in_width, in_channels] => [batch, in_height/2, in_width/2, out_channels]
convolved = conv(rectified, out_channels, stride=2)
output = batchnorm(convolved)
layers.append(output)
layer_specs = [
(a.ngf * 8, 0.5), # decoder_8: [batch, 1, 1, ngf * 8] => [batch, 2, 2, ngf * 8 * 2]
(a.ngf * 8, 0.5), # decoder_7: [batch, 2, 2, ngf * 8 * 2] => [batch, 4, 4, ngf * 8 * 2]
(a.ngf * 8, 0.5), # decoder_6: [batch, 4, 4, ngf * 8 * 2] => [batch, 8, 8, ngf * 8 * 2]
(a.ngf * 8, 0.0), # decoder_5: [batch, 8, 8, ngf * 8 * 2] => [batch, 16, 16, ngf * 8 * 2]
(a.ngf * 4, 0.0), # decoder_4: [batch, 16, 16, ngf * 8 * 2] => [batch, 32, 32, ngf * 4 * 2]
(a.ngf * 2, 0.0), # decoder_3: [batch, 32, 32, ngf * 4 * 2] => [batch, 64, 64, ngf * 2 * 2]
(a.ngf, 0.0), # decoder_2: [batch, 64, 64, ngf * 2 * 2] => [batch, 128, 128, ngf * 2]
]
num_encoder_layers = len(layers)
for decoder_layer, (out_channels, dropout) in enumerate(layer_specs):
skip_layer = num_encoder_layers - decoder_layer - 1
with tf.variable_scope("decoder_%d" % (skip_layer + 1)):
if decoder_layer == 0:
# first decoder layer doesn't have skip connections
# since it is directly connected to the skip_layer
input = layers[-1]
else:
input = tf.concat([layers[-1], layers[skip_layer]], axis=3)
rectified = tf.nn.relu(input)
# [batch, in_height, in_width, in_channels] => [batch, in_height*2, in_width*2, out_channels]
output = deconv(rectified, out_channels)
output = batchnorm(output)
if dropout > 0.0:
output = tf.nn.dropout(output, keep_prob=1 - dropout)
layers.append(output)
# decoder_1: [batch, 128, 128, ngf * 2] => [batch, 256, 256, generator_outputs_channels]
with tf.variable_scope("decoder_1"):
input = tf.concat([layers[-1], layers[0]], axis=3)
rectified = tf.nn.relu(input)
output = deconv(rectified, generator_outputs_channels)
output = tf.tanh(output)
layers.append(output)
return layers[-1]
def create_model(inputs, targets):
def create_discriminator(discrim_inputs, discrim_targets):
n_layers = 3
layers = []
# 2x [batch, height, width, in_channels] => [batch, height, width, in_channels * 2]
input = tf.concat([discrim_inputs, discrim_targets], axis=3)
# layer_1: [batch, 256, 256, in_channels * 2] => [batch, 128, 128, ndf]
with tf.variable_scope("layer_1"):
convolved = conv(input, a.ndf, stride=2)
rectified = lrelu(convolved, 0.2)
layers.append(rectified)
# layer_2: [batch, 128, 128, ndf] => [batch, 64, 64, ndf * 2]
# layer_3: [batch, 64, 64, ndf * 2] => [batch, 32, 32, ndf * 4]
# layer_4: [batch, 32, 32, ndf * 4] => [batch, 31, 31, ndf * 8]
for i in range(n_layers):
with tf.variable_scope("layer_%d" % (len(layers) + 1)):
out_channels = a.ndf * min(2**(i+1), 8)
stride = 1 if i == n_layers - 1 else 2 # last layer here has stride 1
convolved = conv(layers[-1], out_channels, stride=stride)
normalized = batchnorm(convolved)
rectified = lrelu(normalized, 0.2)
layers.append(rectified)
# layer_5: [batch, 31, 31, ndf * 8] => [batch, 30, 30, 1]
with tf.variable_scope("layer_%d" % (len(layers) + 1)):
convolved = conv(rectified, out_channels=1, stride=1)
output = tf.sigmoid(convolved)
layers.append(output)
return layers[-1]
with tf.variable_scope("generator") as scope:
out_channels = int(targets.get_shape()[-1])
outputs = create_generator(inputs, out_channels)
# create two copies of discriminator, one for real pairs and one for fake pairs
# they share the same underlying variables
with tf.name_scope("real_discriminator"):
with tf.variable_scope("discriminator"):
# 2x [batch, height, width, channels] => [batch, 30, 30, 1]
predict_real = create_discriminator(inputs, targets)
with tf.name_scope("fake_discriminator"):
with tf.variable_scope("discriminator", reuse=True):
# 2x [batch, height, width, channels] => [batch, 30, 30, 1]
predict_fake = create_discriminator(inputs, outputs)
with tf.name_scope("discriminator_loss"):
# minimizing -tf.log will try to get inputs to 1
# predict_real => 1
# predict_fake => 0
discrim_loss = tf.reduce_mean(-(tf.log(predict_real + EPS) + tf.log(1 - predict_fake + EPS)))
with tf.name_scope("generator_loss"):
# predict_fake => 1
# abs(targets - outputs) => 0
gen_loss_GAN = tf.reduce_mean(-tf.log(predict_fake + EPS))
gen_loss_L1 = tf.reduce_mean(tf.abs(targets - outputs))
gen_loss = gen_loss_GAN * a.gan_weight + gen_loss_L1 * a.l1_weight
with tf.name_scope("discriminator_train"):
discrim_tvars = [var for var in tf.trainable_variables() if var.name.startswith("discriminator")]
discrim_optim = tf.train.AdamOptimizer(a.lr, a.beta1)
discrim_grads_and_vars = discrim_optim.compute_gradients(discrim_loss, var_list=discrim_tvars)
discrim_train = discrim_optim.apply_gradients(discrim_grads_and_vars)
with tf.name_scope("generator_train"):
with tf.control_dependencies([discrim_train]):
gen_tvars = [var for var in tf.trainable_variables() if var.name.startswith("generator")]
gen_optim = tf.train.AdamOptimizer(a.lr, a.beta1)
gen_grads_and_vars = gen_optim.compute_gradients(gen_loss, var_list=gen_tvars)
gen_train = gen_optim.apply_gradients(gen_grads_and_vars)
ema = tf.train.ExponentialMovingAverage(decay=0.99)
update_losses = ema.apply([discrim_loss, gen_loss_GAN, gen_loss_L1])
global_step = tf.contrib.framework.get_or_create_global_step()
incr_global_step = tf.assign(global_step, global_step+1)
return Model(
predict_real=predict_real,
predict_fake=predict_fake,
discrim_loss=ema.average(discrim_loss),
discrim_grads_and_vars=discrim_grads_and_vars,
gen_loss_GAN=ema.average(gen_loss_GAN),
gen_loss_L1=ema.average(gen_loss_L1),
gen_grads_and_vars=gen_grads_and_vars,
outputs=outputs,
train=tf.group(update_losses, incr_global_step, gen_train),
)
def save_images(fetches, step=None):
image_dir = os.path.join(a.output_dir, "images")
if not os.path.exists(image_dir):
os.makedirs(image_dir)
filesets = []
for i, in_path in enumerate(fetches["paths"]):
name, _ = os.path.splitext(os.path.basename(in_path.decode("utf8")))
fileset = {"name": name, "step": step}
for kind in ["inputs", "outputs", "targets"]:
filename = name + "-" + kind + ".png"
if step is not None:
filename = "%08d-%s" % (step, filename)
fileset[kind] = filename
out_path = os.path.join(image_dir, filename)
contents = fetches[kind][i]
with open(out_path, "wb") as f:
f.write(contents)
filesets.append(fileset)
return filesets
def append_index(filesets, step=False):
index_path = os.path.join(a.output_dir, "index.html")
if os.path.exists(index_path):
index = open(index_path, "a")
else:
index = open(index_path, "w")
index.write("")
if step:
index.write("step ")
index.write("name input output target ")
for fileset in filesets:
index.write("")
if step:
index.write("%d " % fileset["step"])
index.write("%s " % fileset["name"])
for kind in ["inputs", "outputs", "targets"]:
index.write("
")
return index_path
def main():
if tf.__version__.split('.')[0] != "1":
raise Exception("Tensorflow version 1 required")
if a.seed is None:
a.seed = random.randint(0, 2**31 - 1)
tf.set_random_seed(a.seed)
np.random.seed(a.seed)
random.seed(a.seed)
if not os.path.exists(a.output_dir):
os.makedirs(a.output_dir)
if a.mode == "test" or a.mode == "export":
if a.checkpoint is None:
raise Exception("checkpoint required for test mode")
# load some options from the checkpoint
options = {"which_direction", "ngf", "ndf", "lab_colorization"}
with open(os.path.join(a.checkpoint, "options.json")) as f:
for key, val in json.loads(f.read()).items():
if key in options:
print("loaded", key, "=", val)
setattr(a, key, val)
# disable these features in test mode
a.scale_size = CROP_SIZE
a.flip = False
for k, v in a._get_kwargs():
print(k, "=", v)
with open(os.path.join(a.output_dir, "options.json"), "w") as f:
f.write(json.dumps(vars(a), sort_keys=True, indent=4))
if a.mode == "export":
# export the generator to a meta graph that can be imported later for standalone generation
if a.lab_colorization:
raise Exception("export not supported for lab_colorization")
input = tf.placeholder(tf.string, shape=[1])
input_data = tf.decode_base64(input[0])
input_image = tf.image.decode_png(input_data)
# remove alpha channel if present
input_image = tf.cond(tf.equal(tf.shape(input_image)[2], 4), lambda: input_image[:,:,:3], lambda: input_image)
# convert grayscale to RGB
input_image = tf.cond(tf.equal(tf.shape(input_image)[2], 1), lambda: tf.image.grayscale_to_rgb(input_image), lambda: input_image)
input_image = tf.image.convert_image_dtype(input_image, dtype=tf.float32)
input_image.set_shape([CROP_SIZE, CROP_SIZE, 3])
batch_input = tf.expand_dims(input_image, axis=0)
with tf.variable_scope("generator"):
batch_output = deprocess(create_generator(preprocess(batch_input), 3))
output_image = tf.image.convert_image_dtype(batch_output, dtype=tf.uint8)[0]
if a.output_filetype == "png":
output_data = tf.image.encode_png(output_image)
elif a.output_filetype == "jpeg":
output_data = tf.image.encode_jpeg(output_image, quality=80)
else:
raise Exception("invalid filetype")
output = tf.convert_to_tensor([tf.encode_base64(output_data)])
key = tf.placeholder(tf.string, shape=[1])
inputs = {
"key": key.name,
"input": input.name
}
tf.add_to_collection("inputs", json.dumps(inputs))
outputs = {
"key": tf.identity(key).name,
"output": output.name,
}
tf.add_to_collection("outputs", json.dumps(outputs))
init_op = tf.global_variables_initializer()
restore_saver = tf.train.Saver()
export_saver = tf.train.Saver()
with tf.Session() as sess:
sess.run(init_op)
print("loading model from checkpoint")
checkpoint = tf.train.latest_checkpoint(a.checkpoint)
restore_saver.restore(sess, checkpoint)
print("exporting model")
export_saver.export_meta_graph(filename=os.path.join(a.output_dir, "export.meta"))
export_saver.save(sess, os.path.join(a.output_dir, "export"), write_meta_graph=False)
return
examples = load_examples()
print("examples count = %d" % examples.count)
# inputs and targets are [batch_size, height, width, channels]
model = create_model(examples.inputs, examples.targets)
# undo colorization splitting on images that we use for display/output
if a.lab_colorization:
if a.which_direction == "AtoB":
# inputs is brightness, this will be handled fine as a grayscale image
# need to augment targets and outputs with brightness
targets = augment(examples.targets, examples.inputs)
outputs = augment(model.outputs, examples.inputs)
# inputs can be deprocessed normally and handled as if they are single channel
# grayscale images
inputs = deprocess(examples.inputs)
elif a.which_direction == "BtoA":
# inputs will be color channels only, get brightness from targets
inputs = augment(examples.inputs, examples.targets)
targets = deprocess(examples.targets)
outputs = deprocess(model.outputs)
else:
raise Exception("invalid direction")
else:
inputs = deprocess(examples.inputs)
targets = deprocess(examples.targets)
outputs = deprocess(model.outputs)
def convert(image):
if a.aspect_ratio != 1.0:
# upscale to correct aspect ratio
size = [CROP_SIZE, int(round(CROP_SIZE * a.aspect_ratio))]
image = tf.image.resize_images(image, size=size, method=tf.image.ResizeMethod.BICUBIC)
return tf.image.convert_image_dtype(image, dtype=tf.uint8, saturate=True)
# reverse any processing on images so they can be written to disk or displayed to user
with tf.name_scope("convert_inputs"):
converted_inputs = convert(inputs)
with tf.name_scope("convert_targets"):
converted_targets = convert(targets)
with tf.name_scope("convert_outputs"):
converted_outputs = convert(outputs)
with tf.name_scope("encode_images"):
display_fetches = {
"paths": examples.paths,
"inputs": tf.map_fn(tf.image.encode_png, converted_inputs, dtype=tf.string, name="input_pngs"),
"targets": tf.map_fn(tf.image.encode_png, converted_targets, dtype=tf.string, name="target_pngs"),
"outputs": tf.map_fn(tf.image.encode_png, converted_outputs, dtype=tf.string, name="output_pngs"),
}
# summaries
with tf.name_scope("inputs_summary"):
tf.summary.image("inputs", converted_inputs)
with tf.name_scope("targets_summary"):
tf.summary.image("targets", converted_targets)
with tf.name_scope("outputs_summary"):
tf.summary.image("outputs", converted_outputs)
with tf.name_scope("predict_real_summary"):
tf.summary.image("predict_real", tf.image.convert_image_dtype(model.predict_real, dtype=tf.uint8))
with tf.name_scope("predict_fake_summary"):
tf.summary.image("predict_fake", tf.image.convert_image_dtype(model.predict_fake, dtype=tf.uint8))
tf.summary.scalar("discriminator_loss", model.discrim_loss)
tf.summary.scalar("generator_loss_GAN", model.gen_loss_GAN)
tf.summary.scalar("generator_loss_L1", model.gen_loss_L1)
for var in tf.trainable_variables():
tf.summary.histogram(var.op.name + "/values", var)
for grad, var in model.discrim_grads_and_vars + model.gen_grads_and_vars:
tf.summary.histogram(var.op.name + "/gradients", grad)
with tf.name_scope("parameter_count"):
parameter_count = tf.reduce_sum([tf.reduce_prod(tf.shape(v)) for v in tf.trainable_variables()])
saver = tf.train.Saver(max_to_keep=1)
logdir = a.output_dir if (a.trace_freq > 0 or a.summary_freq > 0) else None
sv = tf.train.Supervisor(logdir=logdir, save_summaries_secs=0, saver=None)
with sv.managed_session() as sess:
print("parameter_count =", sess.run(parameter_count))
if a.checkpoint is not None:
print("loading model from checkpoint")
checkpoint = tf.train.latest_checkpoint(a.checkpoint)
saver.restore(sess, checkpoint)
max_steps = 2**32
if a.max_epochs is not None:
max_steps = examples.steps_per_epoch * a.max_epochs
if a.max_steps is not None:
max_steps = a.max_steps
if a.mode == "test":
# testing
# at most, process the test data once
max_steps = min(examples.steps_per_epoch, max_steps)
for step in range(max_steps):
results = sess.run(display_fetches)
filesets = save_images(results)
for i, f in enumerate(filesets):
print("evaluated image", f["name"])
index_path = append_index(filesets)
print("wrote index at", index_path)
else:
# training
start = time.time()
for step in range(max_steps):
def should(freq):
return freq > 0 and ((step + 1) % freq == 0 or step == max_steps - 1)
options = None
run_metadata = None
if should(a.trace_freq):
options = tf.RunOptions(trace_level=tf.RunOptions.FULL_TRACE)
run_metadata = tf.RunMetadata()
fetches = {
"train": model.train,
"global_step": sv.global_step,
}
if should(a.progress_freq):
fetches["discrim_loss"] = model.discrim_loss
fetches["gen_loss_GAN"] = model.gen_loss_GAN
fetches["gen_loss_L1"] = model.gen_loss_L1
if should(a.summary_freq):
fetches["summary"] = sv.summary_op
if should(a.display_freq):
fetches["display"] = display_fetches
results = sess.run(fetches, options=options, run_metadata=run_metadata)
if should(a.summary_freq):
print("recording summary")
sv.summary_writer.add_summary(results["summary"], results["global_step"])
if should(a.display_freq):
print("saving display images")
filesets = save_images(results["display"], step=results["global_step"])
append_index(filesets, step=True)
if should(a.trace_freq):
print("recording trace")
sv.summary_writer.add_run_metadata(run_metadata, "step_%d" % results["global_step"])
if should(a.progress_freq):
# global_step will have the correct step count if we resume from a checkpoint
train_epoch = math.ceil(results["global_step"] / examples.steps_per_epoch)
train_step = (results["global_step"] - 1) % examples.steps_per_epoch + 1
rate = (step + 1) * a.batch_size / (time.time() - start)
remaining = (max_steps - step) * a.batch_size / rate
print("progress epoch %d step %d image/sec %0.1f remaining %dm" % (train_epoch, train_step, rate, remaining / 60))
print("discrim_loss", results["discrim_loss"])
print("gen_loss_GAN", results["gen_loss_GAN"])
print("gen_loss_L1", results["gen_loss_L1"])
if should(a.save_freq):
print("saving model")
saver.save(sess, os.path.join(a.output_dir, "model"), global_step=sv.global_step)
if sv.should_stop():
break
main()
实验结果
实验结果如下图所示,其中左边为输入图像,中间为还原后的图像,右边是真实图像。因为在这里只迭代了十轮,因此效果一般。
源代码链接:CGAN源代码
你可能感兴趣的:(深度学习)