Android7.0 Vold 进程工作机制分析之由Kernel发起挂载请求
Android7.0 Vold 进程工作机制分析之由Kernel发起挂载请求
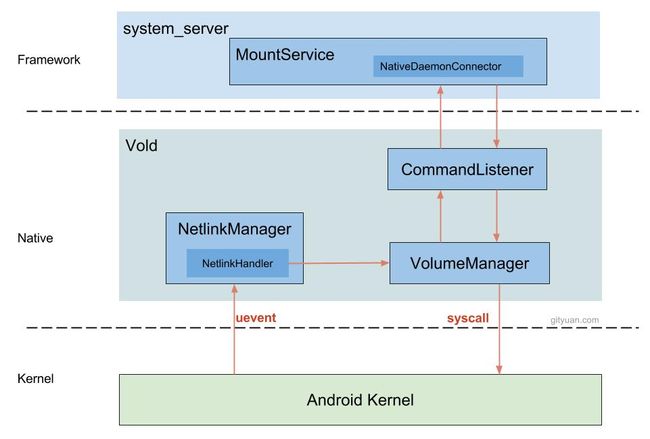
一、MountService简介
MountService是一个系统服务,负责与Vold进程通信的,运行在SystemServer进程,当收到Vold的挂载消息后,会通过广播的方式通知上层应用.
它是在SystemServer的startOtherServices方法里启动的
SystemServer路径——————/frameworks/base/services/java/com/android/server/SystemServer.java
private void startOtherServices() {
......
//如果不为低级工厂测试
if (mFactoryTestMode != FactoryTest.FACTORY_TEST_LOW_LEVEL) {
if (!disableStorage &&!"0".equals(SystemProperties.get("system_init.startmountservice"))) {
try {
//启动MountService
mSystemServiceManager.startService(MOUNT_SERVICE_CLASS);
mountService = IMountService.Stub.asInterface(ServiceManager.getService("mount"));
} catch (Throwable e) {
reportWtf("starting Mount Service", e);
}
}
}
......
}这里并不打算详细介绍MountService的启动过程,只需关注它的构造方法即可(在启动时会调用构造方法)
MountService路径——————/frameworks/base/services/core/java/com/android/server/MountService.java
class MountService extends IMountService.Stub implements INativeDaemonConnectorCallbacks, Watchdog.Monitor {
......
public MountService(Context context) {
......
//创建并启动一个带消息循环的MountService工作线程
HandlerThread hthread = new HandlerThread(TAG);
hthread.start();
//为MountService工作线程创建一个Handler
mHandler = new MountServiceHandler(hthread.getLooper());
......
/*
NativeDaemonConnector用于Socket通信,第二个参数“vold”表示将和Vold通信,也就是
和CL模块中的那个socket建立通信连接。第一个参数为INativeDaemonConnectorCallbacks
接口。它提供两个回调函数:
onDaemonConnected:当NativeDaemonConnector连接上Vold后回调。
onEvent:当NativeDaemonConnector收到来自Vold的数据后回调。
*/
mConnector = new NativeDaemonConnector(this, "vold", MAX_CONTAINERS * 2, VOLD_TAG, 25,
null);
//创建线程名为"VoldConnector"的线程,用于跟vold通信
mConnectorThread = new Thread(mConnector, VOLD_TAG);
......
}主要做了以下几件事
①创建并启动一个带消息循环的MountService工作线程 HandlerThread
②为MountService工作线程创建一个Handler
③创建线程名为”VoldConnector”的线程,用于跟vold通信
在MountService的start方法启动这个线程
private void start() {
mConnectorThread.start();
}这个VoldConnector线程在run方法里会调用一个方法listenToSocket,监听Vold进程发过来的Socket消息
NativeDaemonConnector路径——/frameworks/base/services/core/java/com/android/server/NativeDaemonConnector.java
final class NativeDaemonConnector implements Runnable, Handler.Callback, Watchdog.Monitor {
......
@Override
public void run() {
mCallbackHandler = new Handler(mLooper, this);
while (true) {
try {
//监听Vold进程发过来的socket消息
listenToSocket();
} catch (Exception e) {
loge("Error in NativeDaemonConnector: " + e);
SystemClock.sleep(5000);
}
}
}
......
}在listenToSocket方法里会建立Socket连接,把接收的消息解析成NativeDaemonEvent事件,通过mCallbackHandler处理这个事件
private void listenToSocket() throws IOException {
LocalSocket socket = null;
try {
socket = new LocalSocket();
LocalSocketAddress address = determineSocketAddress();
//建立与"/dev/socket/vold"的socket连接
socket.connect(address);
......
try {
//解析成 NativeDaemonEvent事件
final NativeDaemonEvent event = NativeDaemonEvent.parseRawEvent(rawEvent, fdList);
//当响应码区间为[600,700),则发送消息交由mCallbackHandler处理
Message msg = mCallbackHandler.obtainMessage( event.getCode(), uptimeMillisInt(), 0, event.getRawEvent());
......
}
}关于MountService的简介先到这里,下面分析Kernel发起挂载请求的流程.
二、Kernel发起挂载请求的流程
上一篇文章Android7.0 Vold 进程工作机制分析之整体流程已经讲了,Kernel是通过Netlink 进行通信的,Netlink 是一种特殊的Socket。
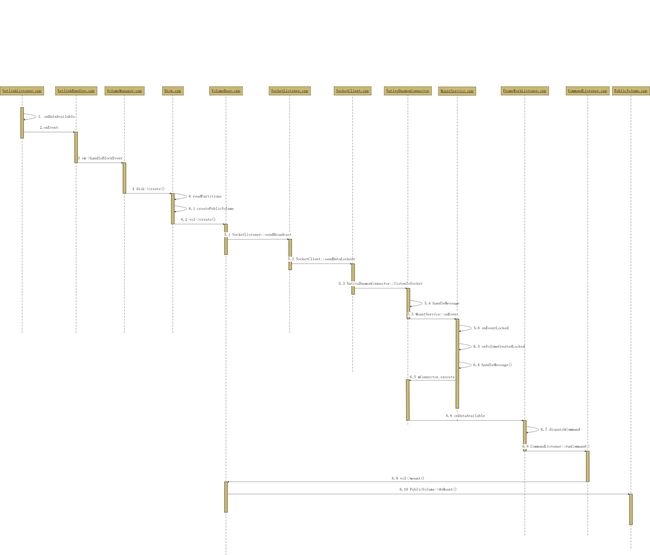
以下是上一篇文章的Vold 进程启动时序图(缩放浏览器可以放大查看或者在新标签页打开)
这里以SD卡插入,Kernel挂载请求为例,流程从NetlinkListener的onDataAvailable开始
1.NetlinkListener::onDataAvailable
bool NetlinkListener::onDataAvailable(SocketClient *cli)
{
int socket = cli->getSocket();
ssize_t count;
uid_t uid = -1;
......
NetlinkEvent *evt = new NetlinkEvent();
//解析获得NetlinkEvent实例
if (evt->decode(mBuffer, count, mFormat)) {
//传入NetlinkEvent实例
onEvent(evt);
}
......
}解析获得NetlinkEvent实例,调用onEvent方法,onEvent由子类NetlinkHandler实现
2.NetlinkHandler::onEvent
void NetlinkHandler::onEvent(NetlinkEvent *evt) {
//获取VolumeManager 单例对象
VolumeManager *vm = VolumeManager::Instance();
const char *subsys = evt->getSubsystem();
if (!strcmp(subsys, "block")) {
//调用VolumeManager 的handleBlockEvent方法
vm->handleBlockEvent(evt);
}
}获取VolumeManager 的单例然后调用handleBlockEvent方法
3.vm->handleBlockEvent
void VolumeManager::handleBlockEvent(NetlinkEvent *evt) {
switch (evt->getAction()) {
case NetlinkEvent::Action::kAdd: {
for (auto source : mDiskSources) {
if (source->matches(eventPath)) {
......
auto disk = new android::vold::Disk(eventPath, device,source->getNickname(), flags);
//调用disk 的create方法
disk->create();
mDisks.push_back(std::shared_ptr<android::vold::Disk>(disk));
break;
}
}
break;
}
case NetlinkEvent::Action::kChange: {
......
break;
}
case NetlinkEvent::Action::kRemove: {
......
break;
}
......
}
}SD卡插入为add事件。那么调用了disk->create()方法。
4.disk->create()
路径:
disk.cpp———————–system/vold/disk.cpp
status_t Disk::create() {
CHECK(!mCreated);
mCreated = true;
//调用notifyEvent方法
notifyEvent(ResponseCode::DiskCreated, StringPrintf("%d", mFlags));
readMetadata();
//读取分区数据,创建Volume
readPartitions();
return OK;
}在create方法里调用notifyEvent通知DiskCreated事件,然后还有readMetadata方法创建Volume.所有这里也要分两条线5和6
5. Disk::notifyEvent
void Disk::notifyEvent(int event) {
VolumeManager::Instance()->getBroadcaster()->sendBroadcast(event,getId().c_str(), false);
}获取单例VolumeManager对象,然后获取到SocketListener对象调用sendBroadcast方法
sendBroadcast方法的实现如下
在safelist列表中添加SocketClient,然后调用sendMsg方法
5. 1 SocketListener::sendBroadcast
void SocketListener::sendBroadcast(int code, const char *msg, bool addErrno) {
SocketClientCollection safeList;
//首先添加所有活动的SockClient到安全列表中
safeList.clear();
for (i = mClients->begin(); i != mClients->end(); ++i) {
SocketClient* c = *i;
c->incRef();
//添加
safeList.push_back(c);
}
while (!safeList.empty()) {
/* Pop the first item from the list */
i = safeList.begin();
SocketClient* c = *i;
safeList.erase(i);
//调用SockClient的sendMSg方法发送消息
if (c->sendMsg(code, msg, addErrno, false)) {
SLOGW("Error sending broadcast (%s)", strerror(errno));
}
c->decRef();
}
}SockClient
路径:
SockClient.cpp————————system/core/libsysutils/src/SockClient.cpp
调用sendMsg方法经过层层跳转,到sendDataLockedv方法中,往Socket中写入信息
5.2 sendDataLockedv
int SocketClient::sendDataLockedv(struct iovec *iov, int iovcnt) {
......
for (;;) {
ssize_t rc = TEMP_FAILURE_RETRY(
writev(mSocket, iov + current, iovcnt - current));
......
}写入到Socket之后,SystemServer中的MountService会收到,就是前面讲到的NativeDaemonConnector的listenToSocket方法
5.3 NativeDaemonConnector::listenToSocket
在listenToSocket方法里会建立Socket连接,把接收的消息解析成NativeDaemonEvent事件,通过mCallbackHandler处理这个事件
private void listenToSocket() throws IOException {
LocalSocket socket = null;
try {
socket = new LocalSocket();
LocalSocketAddress address = determineSocketAddress();
//建立与"/dev/socket/vold"的socket连接
socket.connect(address);
......
try {
//解析成 NativeDaemonEvent事件
final NativeDaemonEvent event = NativeDaemonEvent.parseRawEvent(rawEvent, fdList);
//当响应码区间为[600,700),则发送消息交由mCallbackHandler处理
Message msg = mCallbackHandler.obtainMessage( event.getCode(), uptimeMillisInt(), 0, event.getRawEvent());
......
}
}mCallbackHandler处理事件,HandleMessage方法如下
5.4 NativeDaemonConnector::handleMessage
@Override
public boolean handleMessage(Message msg) {
final String event = (String) msg.obj;
final int start = uptimeMillisInt();
final int sent = msg.arg1;
try {
if (!mCallbacks.onEvent(msg.what, event, NativeDaemonEvent.unescapeArgs(event))) {
log(String.format("Unhandled event '%s'", event));
}
}
......
return true;
}在handleMessage方法里会回调MountService的onEvent方法
5.5 MountService::onEvent
@Override
public boolean onEvent(int code, String raw, String[] cooked) {
synchronized (mLock) {
return onEventLocked(code, raw, cooked);
}
}交给onEventLocked处理了
5.6 MountService::onEventLocked
private boolean onEventLocked(int code, String raw, String[] cooked) {
switch (code) {
//处理DISK_CREATED创建成功事件
case VoldResponseCode.DISK_CREATED: {
if (cooked.length != 3) break;
final String id = cooked[1];
int flags = Integer.parseInt(cooked[2]);
if (SystemProperties.getBoolean(StorageManager.PROP_FORCE_ADOPTABLE, false)
|| mForceAdoptable) {
flags |= DiskInfo.FLAG_ADOPTABLE;
}
mDisks.put(id, new DiskInfo(id, flags));
break;
}
......
//这个事件就是之前4.disk->create()方法走第6条线最后回到这里处理
//处理VOLUME_CREATED创建成功事件
case VoldResponseCode.VOLUME_CREATED: {
final String id = cooked[1];
final int type = Integer.parseInt(cooked[2]);
final String diskId = TextUtils.nullIfEmpty(cooked[3]);
final String partGuid = TextUtils.nullIfEmpty(cooked[4]);
final DiskInfo disk = mDisks.get(diskId);
final VolumeInfo vol = new VolumeInfo(id, type, disk, partGuid);
mVolumes.put(id, vol);
onVolumeCreatedLocked(vol);
break;
}
......
}
return true;
}小结
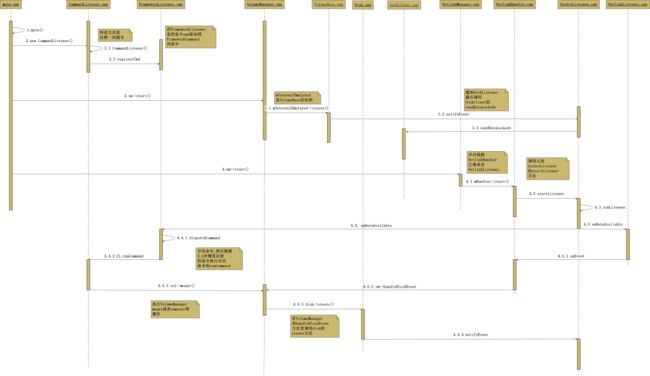
在这里处理了DISK_CREATED创建成功事件,至此这个事件传递就完了.我画一张UML图
(缩放浏览器可以放大查看或者在新标签页打开)
下面介绍的是从第6条线开始的流程
6 Disk::readPartitions()
在这个方法里会读取分区数据,然后创建Volume
status_t Disk::readPartitions() {
......
if (table == Table::kMbr) {
......
//6.2 创建PublicVolume
createPublicVolume(partDevice);
break;
}
} else if (table == Table::kGpt) {
......
if (!strcasecmp(typeGuid, kGptBasicData)) {
createPublicVolume(partDevice);
} else if (!strcasecmp(typeGuid, kGptAndroidExpand)) {
createPrivateVolume(partDevice, partGuid);
}
}
}
}
if (table == Table::kUnknown || !foundParts) {
......
if (ReadMetadataUntrusted(mDevPath, fsType, unused, unused) == OK) {
createPublicVolume(mDevice);
}
}
......
}6.1 Disk::createPublicVolume()
void Disk::createPublicVolume(dev_t device) {
//获取PublicVolume实例
auto vol = std::shared_ptr<VolumeBase>(new PublicVolume(device));
if (mJustPartitioned) {
LOG(DEBUG) << "Device just partitioned; silently formatting";
vol->setSilent(true);
vol->create();
vol->format("auto");
vol->destroy();
vol->setSilent(false);
}
mVolumes.push_back(vol);
vol->setDiskId(getId());
//调用VolumeBase的create方法
vol->create();
}6.2 VolumeBase::create()
status_t VolumeBase::create() {
mCreated = true;
status_t res = doCreate();
//向VolumeManager发送VolumeCreated命令
notifyEvent(ResponseCode::VolumeCreated,StringPrintf("%d \"%s\" \"%s\"", mType, mDiskId.c_str(), mPartGuid.c_str()));
//设置已卸载状态
setState(State::kUnmounted);
return res;
}在这个方法里通知VolumeManager创建了Volume,这个方法之后的步骤就和第5步以后一样的了,就不重复介绍了.
之后走到5.6 MountService::onEventLocked方法里的case VoldResponseCode.VOLUME_CREATED:处理,调用onVolumeCreatedLocked(vol)方法
6.3 MountService::onVolumeCreatedLocked()
class MountService extends IMountService.Stub implements INativeDaemonConnectorCallbacks, Watchdog.Monitor {
......
private void onVolumeCreatedLocked(VolumeInfo vol) {
......
if (vol.type == VolumeInfo.TYPE_EMULATED) {
final StorageManager storage = mContext.getSystemService(StorageManager.class);
final VolumeInfo privateVol = storage.findPrivateForEmulated(vol);
if (Objects.equals(StorageManager.UUID_PRIVATE_INTERNAL, mPrimaryStorageUuid)
&& VolumeInfo.ID_PRIVATE_INTERNAL.equals(privateVol.id)) {
Slog.v(TAG, "Found primary storage at " + vol);
vol.mountFlags |= VolumeInfo.MOUNT_FLAG_PRIMARY;
vol.mountFlags |= VolumeInfo.MOUNT_FLAG_VISIBLE;
//handler发送消息
mHandler.obtainMessage(H_VOLUME_MOUNT, vol).sendToTarget();
......
}
}之后走到Handler处理H_VOLUME_MOUNT消息
6.4 MountService::handleMessage()
class MountServiceHandler extends Handler {
public MountServiceHandler(Looper looper) {
super(looper);
}
@Override
public void handleMessage(Message msg) {
switch (msg.what) {
......
case H_VOLUME_MOUNT: {
final VolumeInfo vol = (VolumeInfo) msg.obj;
if (isMountDisallowed(vol)) {
Slog.i(TAG, "Ignoring mount " + vol.getId() + " due to policy");
break;
}
try {
//执行mount(挂载)命令
mConnector.execute("volume", "mount", vol.id, vol.mountFlags,
vol.mountUserId);
} catch (NativeDaemonConnectorException ignored) {
}
break;
}
......
}会调用NativeDaemonConnector的execute方法,经过跳转到executeForList方法
6.5 NativeDaemonConnector::executeForList()
final class NativeDaemonConnector implements Runnable, Handler.Callback, Watchdog.Monitor {
......
public NativeDaemonEvent[] executeForList(long timeoutMs, String cmd, Object... args)
throws NativeDaemonConnectorException {
......
synchronized (mDaemonLock) {
if (mOutputStream == null) {
throw new NativeDaemonConnectorException("missing output stream");
} else {
try {
//往Socket 输出流写入命令
mOutputStream.write(rawCmd.getBytes(StandardCharsets.UTF_8));
} catch (IOException e) {
throw new NativeDaemonConnectorException("problem sending command", e);
}
}
......
}
往Socket写入输出流之后,Vold中FrameWorkListener的onDataAvailable会收到
6.6 FrameWorkListener::onDataAvailable()
bool FrameworkListener::onDataAvailable(SocketClient *c) {
char buffer[CMD_BUF_SIZE];
int len;
//读取socket消息
len = TEMP_FAILURE_RETRY(read(c->getSocket(), buffer, sizeof(buffer)));
.....
int i;
for (i = 0; i < len; i++) {
if (buffer[i] == '\0') {
//根据消息内容 派发命令
dispatchCommand(c, buffer + offset);
offset = i + 1;
}
}
return true;
}在onDataAvailable方法里会先读取Socket消息,然后分发命令
6.7 FrameWorkListener::dispatchCommand()
void FrameworkListener::dispatchCommand(SocketClient *cli, char *data) {
......
//执行对应的消息
for (i = mCommands->begin(); i != mCommands->end(); ++i) {
FrameworkCommand *c = *i;
//匹配命令
if (!strcmp(argv[0], c->getCommand())) {
//执行命令
if (c->runCommand(cli, argc, argv)) {
SLOGW("Handler '%s' error (%s)", c->getCommand(), strerror(errno));
}
goto out;
}
}
......
}会调用FrameworkCommand 的runCommand方法,之前在CommandListener的构造方法里注册的这些指令,就是FrameWorkCommand类型,如下
FrameworkListener.cpp
void FrameworkListener::registerCmd(FrameworkCommand *cmd) {
//添加元素
mCommands->push_back(cmd);
}CommandListener.cpp
CommandListener::CommandListener() :FrameworkListener("vold", true) {
//注册多条指令
registerCmd(new DumpCmd());
registerCmd(new VolumeCmd());
registerCmd(new AsecCmd());
registerCmd(new ObbCmd());
registerCmd(new StorageCmd());
registerCmd(new FstrimCmd());
registerCmd(new AppFuseCmd());
}这里插入SD卡是挂载指令,即VolumeCmd指令,会进入到VolumeCmd的runCommand方法
6.8 CommandListener::runCommand()
CommandListener.cpp
int CommandListener::VolumeCmd::runCommand(SocketClient *cli, int argc, char **argv) {
......
} else if (cmd == "mount" && argc > 2) {
// mount [volId] [flags] [user]
std::string id(argv[2]);
auto vol = vm->findVolume(id);
if (vol == nullptr) {
return cli->sendMsg(ResponseCode::CommandSyntaxError, "Unknown volume", false);
}
int mountFlags = (argc > 3) ? atoi(argv[3]) : 0;
userid_t mountUserId = (argc > 4) ? atoi(argv[4]) : -1;
vol->setMountFlags(mountFlags);
vol->setMountUserId(mountUserId);
//执行真正的挂载操作
int res = vol->mount();
if (mountFlags & android::vold::VolumeBase::MountFlags::kPrimary) {
vm->setPrimary(vol);
}
//发送应答消息给MountService
return sendGenericOkFail(cli, res);
......
}
}会执行实际的mount操作
6.9 vol->mount()
vol是VolumeBase的实例,VolumeBase的mount方法由具体的子类EmulatedVolume、PublicVolume、PrivateVolume等实现
执行操作之后会发送应答消息给MountService.
status_t VolumeBase::mount() {
......
setState(State::kChecking);
//doMount由子类实现实际挂载操作
status_t res = doMount();
if (res == OK) {
setState(State::kMounted);
} else {
setState(State::kUnmountable);
}
return res;
}6.10 PublicVolume->doMount()
PublicVolume.cpp
status_t PublicVolume::doMount() {
......
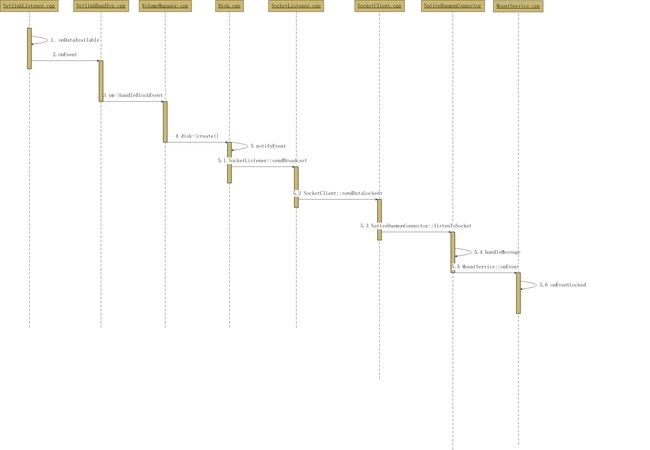
}三、小结
至此,这个挂载操作就完成了.时序图如下:
下一篇讲解从上层MountService发起挂载请求的流程.