Module
-
generator_resnet
def generator_resnet (image, options, reuse=False, name="generator"):
with tf.variable_scope(name):
# image is 256 x 256 x input_c_dim
if reuse:
tf.get_variable_scope().reuse_variables()
else:
assert tf.get_variable_scope().reuse is False
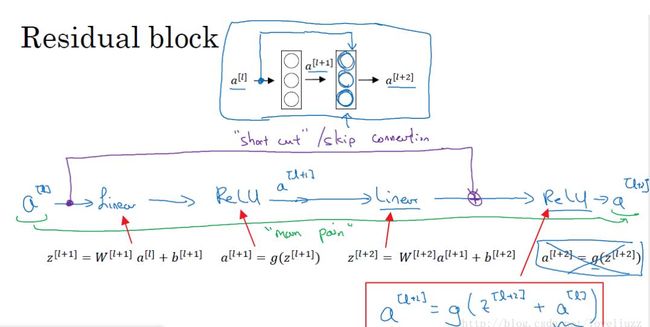
def residule_block(x, dim, ks=3, s=1, name='res'):
p = int((ks - 1) / 2)
y = tf.pad(x, [[0, 0], [p, p], [p, p], [0, 0]], "REFLECT")
y = instance_norm(conv2d(y, dim, ks, s, padding='VALID', name=name+'_c1'), name+'_bn1')
y = tf.pad(tf.nn.relu(y), [[0, 0], [p, p], [p, p], [0, 0]], "REFLECT")
y = instance_norm(conv2d(y, dim, ks, s, padding='VALID', name=name+'_c2'), name+'_bn2')
return y + x
# Justin Johnson's model from https://github.com/jcjohnson/fast-neural-style/
# The network with 9 blocks consists of: c7s1-32, d64, d128, R128, R128, R128,
# R128, R128, R128, R128, R128, R128, u64, u32, c7s1-3
c0 = tf.pad(image, [[0, 0], [3, 3], [3, 3], [0, 0]], "REFLECT")
c1 = tf.nn.relu(instance_norm(conv2d(c0, options.gf_dim, 7, 1, padding='VALID', name='g_e1_c'), 'g_e1_bn'))
c2 = tf.nn.relu(instance_norm(conv2d(c1, options.gf_dim*2, 3, 2, name='g_e2_c'), 'g_e2_bn'))
c3 = tf.nn.relu(instance_norm(conv2d(c2, options.gf_dim*4, 3, 2, name='g_e3_c'), 'g_e3_bn'))
# define G network with 9 resnet blocks
r1 = residule_block(c3, options.gf_dim*4, name='g_r1')
r2 = residule_block(r1, options.gf_dim*4, name='g_r2')
r3 = residule_block(r2, options.gf_dim*4, name='g_r3')
r4 = residule_block(r3, options.gf_dim*4, name='g_r4')
r5 = residule_block(r4, options.gf_dim*4, name='g_r5')
r6 = residule_block(r5, options.gf_dim*4, name='g_r6')
r7 = residule_block(r6, options.gf_dim*4, name='g_r7')
r8 = residule_block(r7, options.gf_dim*4, name='g_r8')
r9 = residule_block(r8, options.gf_dim*4, name='g_r9')
d1 = deconv2d(r9, options.gf_dim*2, 3, 2, name='g_d1_dc')
d1 = tf.nn.relu(instance_norm(d1, 'g_d1_bn'))
d2 = deconv2d(d1, options.gf_dim, 3, 2, name='g_d2_dc')
d2 = tf.nn.relu(instance_norm(d2, 'g_d2_bn'))
d2 = tf.pad(d2, [[0, 0], [3, 3], [3, 3], [0, 0]], "REFLECT")
pred = tf.nn.tanh(conv2d(d2, options.output_c_dim, 7, 1, padding='VALID', name='g_pred_c'))
return pred
note that:
1.here instance norm be used.
Batch norm averages and standard deviations all pixels of a picture in a batch. The instance norm averages and standard deviations all pixels of a single picture.
What the style transfer wants is to match the deep activation distribution of the generated image with the distribution of the style image. This can actually be considered as a problem of domain adaptation. So in this case, instance norm is more suitable.
2.about pad
tf.pad
pad( tensor, #input tensor , paddings,
mode=’CONSTANT’, # it means 0 be filled up
name=None
)
example:
# 't' is [[1, 2, 3], [4, 5, 6]].
# 'paddings' is [[1, 1,], [2, 2]].
# 'constant_values' is 0.
# rank of 't' is 2.
pad(t, paddings, "CONSTANT")
==> [[0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 2, 3, 0, 0],
[0, 0, 4, 5, 6, 0, 0],
[0, 0, 0, 0, 0, 0, 0]]
pad(t, paddings, "REFLECT") ==> [[6, 5, 4, 5, 6, 5, 4],
[3, 2, 1, 2, 3, 2, 1],
[6, 5, 4, 5, 6, 5, 4],
[3, 2, 1, 2, 3, 2, 1]]
note that:
'paddings' is [[1, 1,], [2, 2]]. means:
[1,1] refers to expanding one line up and one line down
[2,2] refers to 2 columns to the left and 2 columns to the right
and when "REFLECT" is on, 'paddings' is [[1, 1,], [2, 2]].
original
1, 2, 3
4, 5, 6
Scroll up one line, 123 as the up edge(axis of symmetry)
4,5,6
1,2,3
4,5,6
Scroll down one line, 456 as the axis of symmetry
4,5,6
1,2,3
4,5,6
1,2,3
turn left 2 rows, 4141 as axis of symmetry
6,5,4,5,6
3,2,1,2,3
6,5,4,5,6
3,2,1,2,3
turn right 2 rows, 6362 as axis of symmetry
6,5,4,5,6,5,4
3,2,1,2,3,2,1
6,5,4,5,6,5,4
3,2,1,2,3,2,1
OP
-
conv2d
def conv2d(input, filter, kernel, strides=1, stddev=0.02, name='conv2d'):
with tf.variable_scope(name):
w = tf.get_variable(
'w',
(kernel, kernel, input.get_shape()[-1], filter),
initializer=tf.truncated_normal_initializer(stddev=stddev)
)
conv = tf.nn.conv2d(input, w, strides=[1, strides, strides, 1], padding='VALID')
b = tf.get_variable(
'b',
[filter],
initializer=tf.constant_initializer(0.0)
)
conv = tf.reshape(tf.nn.bias_add(conv, b), tf.shape(conv))
return conv
compare with the following code :
def scope(default_name):
def deco(fn):
def wrapper(*args, **kwargs):
if 'name' in kwargs:
name = kwargs['name']
kwargs.pop('name')
else:
name = default_name
with tf.variable_scope(name):
return fn(*args, **kwargs)
return wrapper
return deco
@scope('conv2d')
def conv2d(input, filter, kernel, strides=1, stddev=0.02):
w = tf.get_variable(
'w',
(kernel, kernel, input.get_shape()[-1], filter),
initializer=tf.truncated_normal_initializer(stddev=stddev)
)
conv = tf.nn.conv2d(input, w, strides=[1, strides, strides, 1], padding='VALID')
b = tf.get_variable(
'b',
[filter],
initializer=tf.constant_initializer(0.0)
)
conv = tf.reshape(tf.nn.bias_add(conv, b), tf.shape(conv))
return conv
anyway, i prefer just using "with tf.variable_scope(name):"
-
res_block
def res_block(x, dim, name='res_block'):
with tf.variable_scope(name):
y = reflect_pad(x, name='rp1')
y = conv2d(y, dim, 3, name='conv1')
y = lrelu(y)
y = reflect_pad(y, name='rp2')
y = conv2d(y, dim, 3, name='conv2')
y = lrelu(y)
return tf.add(x, y)