串行通信的几个名词:
全双工:数据线有2条,分别用来发送和接收。
半双工:数据线只有1条,用来发送和接收,分时复用。
同步:时钟线1条,在时钟信号的控制下传输数据。
(1)IIC
IIC(Inter-Integrated Circuit)总线是一种由 PHILIPS 公司开发的两线式串行总线,用于连接微控制器及其外围设备。它是由数据线 SDA 和时钟 SCL 构成的串行总线,SDA 可发送和接收数据,因此是一种半双工通信。

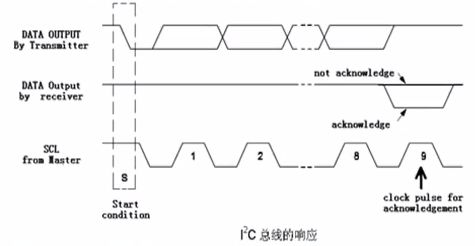
I2C 总线在传送数据过程中共有三种类型信号, 它们分别是:开始信号、结束信号和应答信号。
开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。
结束信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的 IC 在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据。CPU 向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU 接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
这些信号中,起始信号是必需的,结束信号和应答信号,都可以不要。
①空闲状态
IIC总线的SDA和SCL两条信号线同时处于高电平,称为总线的空闲状态。两条信号线各自的上拉电阻把电平拉高。
②开始信号和结束信号
开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。
结束信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。

③应答信号
发送器每发送一个字节,就在时钟脉冲9期间释放数据线,由接收器反馈一个应答信号。应答信号为低电平时,规定为有效应答位(ACK简称应答位),表示接收器已经成功地接收了该字节;应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功。对于反馈有效应答位ACK的要求是,接收器在第九个时钟脉冲之前的低电平期间将SDA线拉低,确保在该时钟的高电平期间为稳定的低电平。
如果接收器是主控器(即单片机接收数据),则在它收到最后一个字节后,发送一个NACK信号,以通知被控发送器结束数据发送,并释放SDA线,以便主控接收器发送一个停止信号P。
④数据传输
数据的有效性:SCL为高电平期间,SDA必须保持稳定(1或0),即数据在SCL的上升沿到来之前要准备好,在SCL的下降沿到来之前要稳定。
在IIC总线上传送的每一位数据都有一个时钟脉冲信号相对应,即在SCL串行时钟的配合下,在SDA上逐位地串行传送每一位数据。数据位的传输是边沿触发。
程序代码
参考实验23 IIC代码。
//单片机向IIC设备上写数据
IIC_Start();
IIC_Send_Byte(0XA0); //一般要先发送IIC设备的地址、工作模式等等
IIC_Wait_Ack(); //等待IIC设备发出ACK
IIC_Send_Byte(0X11); //写数据,IIC_Send_Byte()和IIC_Wait_Ack()成对出现
IIC_Wait_Ack();
IIC_Stop();//产生一个停止条件
//单片机从IIC设备上读取数据
IIC_Start();
IIC_Send_Byte(0XA0); //一般还需要先对设备的地址、工作模式进行配置。可能用到几组的IIC_Send_Byte()和IIC_Wait_Ack()。
IIC_Wait_Ack(); //等待IIC设备响应
X = IIC_Read_Byte(0); //单片机接收一个字节,单片机发出ACK信号
Y = IIC_Read_Byte(1); //单片机接收一个字节,单片机发出NACK信号
//ACK信号还是NACK信号,要参照IIC设备的datasheet
IIC_Stop();//产生一个停止条件
(2)SPI
SPI 是英语 Serial Peripheral interface 的缩写,顾名思义就是串行外围设备接口。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为 PCB 的布局上节省空间,提供方便。
SPI 接口一般使用 4 条线通信:
MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK 时钟信号,由主设备产生。
CS 从设备片选信号,由主设备控制。

主机和从机都有一个串行移位寄存器,主机通过向它的 SPI 串行寄存器写入一个字节来发起一次传输。寄存器通过 MOSI 信号线将字节传送给从机,从机也将自己的移位寄存器中的内容通过 MISO 信号线返回给主机。这样,两个移位寄存器中的内容就被交换。外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
SPI 总线四种工作方式 SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果 CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果 CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。SPI 主模块和与之通信的外设备时钟相位和极性应该一致。



这里我们使用的是 PB13、14、15 这 3 个(SCK.、MISO、MOSI,CS 使用软件管理方式),所以设置这三个为复用 IO。

①配置相关引脚的复用功能,使能SPIx时钟。
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );//PORTB时钟使能
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );//SPI2时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB13/14/15复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化GPIOB
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15); //PB13/14/15上拉

实际经验,在MISO中,也可以仍然用推挽复用输出,而不用浮空、上拉输入。
②初始化SPIx,设置SPI工作模式
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
结构体成员变量比较多,这里我们挑取几个重要的成员变量讲解一下:
第一个参数 SPI_Direction 是用来设置 SPI 的通信方式,可以选择为半双工,全双工,以及串行发和串行收方式,这里我们选择全双工模式 SPI_Direction_2Lines_FullDuplex。
第二个参数 SPI_Mode 用来设置 SPI 的主从模式,这里我们设置为主机模式 SPI_Mode_Master,当然有需要你也可以选择为从机模式 SPI_Mode_Slave。
第三个参数 SPI_DataSiz 为 8 位还是 16 位帧格式选择项,这里我们是 8 位传输,选择SPI_DataSize_8b。
第四个参数 SPI_CPOL 用来设置时钟极性,我们设置串行同步时钟的空闲状态为高电平所以我们选择 SPI_CPOL_High。
第五个参数 SPI_CPHA 用来设置时钟相位,也就是选择在串行同步时钟的第几个跳变沿(上升或下降)数据被采样,可以为第一个或者第二个条边沿采集,这里我们选择第二个跳变沿,所以选择 SPI_CPHA_2Edge
第六个参数 SPI_NSS 设置 NSS 信号由硬件(NSS 管脚)还是软件控制,这里我们通过软件控制 NSS 关键,而不是硬件自动控制,所以选择 SPI_NSS_Soft。
第七个参数 SPI_BaudRatePrescaler 很关键,就是设置 SPI 波特率预分频值也就是决定 SPI 的时钟的参数,从不分频道 256 分频 8 个可选值,初始化的时候我们选择 256 分频值SPI_BaudRatePrescaler_256, 传输速度为 36M/256=140.625KHz。
第八个参数 SPI_FirstBit 设置数据传输顺序是 MSB 位在前还是 LSB 位在前,,这里我们选择SPI_FirstBit_MSB 高位在前。
第九个参数 SPI_CRCPolynomial 是用来设置 CRC 校验多项式,提高通信可靠性,大于 1 即可。
③使能SPIx
SPI_Cmd(SPI2, ENABLE); //使能SPI外设
④然后就能通过SPI进行读写操作,状态位判断。
void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data);
uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx) ;
SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE); // 发送完成标志位