目录:
1、运行多线激光雷达;
2、运行IMU;
3、录制rosbag包;
4、配置cartographer;
5、查看地图;
1、运行多线激光雷达:
主要是测试雷达是否正在运行,确认雷达点云topic类型是否一致,确认雷达frame id(可统一修改为laser_link)。
2、运行IMU:
主要时测试IMU是否正常运行,可以通过rostopic list、rostopic info /imu、rosmsg info /sensor_msgs/Imu进行确认,同时确认IMU的frame id(可统一修改为imu_link);
另外,确认IMU输出数据中的角速度的单位,是角度每秒还是弧度每秒,cartographer需要的是弧度每秒。
3、录制rosbag包:
运行激光雷达和IMU,录制rosbag包:rosbag record -O b3_01 /IMU /Laser;
4、配置cartographer包:建议配置官网最新版,因为发现网上流传版本比较老,至少源代码的结构已经发生了较大变化,算法功能也发生了较大变化
4.1、配置lua文件:主要修改以下几个参数
options = { map_builder = MAP_BUILDER, trajectory_builder = TRAJECTORY_BUILDER, map_frame = "map", tracking_frame = "imu_link", --修改为imu的frame id published_frame = "base_link", odom_frame = "odom", provide_odom_frame = true, publish_frame_projected_to_2d = false, use_odometry = false, use_nav_sat = false, use_landmarks = false, num_laser_scans = 0, num_multi_echo_laser_scans = 0, num_subdivisions_per_laser_scan = 1, num_point_clouds = 1, --修改为1,表示雷达数量; lookup_transform_timeout_sec = 0.2, submap_publish_period_sec = 0.3, pose_publish_period_sec = 5e-3, trajectory_publish_period_sec = 30e-3, rangefinder_sampling_ratio = 1., odometry_sampling_ratio = 1., fixed_frame_pose_sampling_ratio = 1., imu_sampling_ratio = 1., landmarks_sampling_ratio = 1., } --修改为1,它表示累加几帧的point做为1帧,有些雷达是将360°的point分批次发布的,
--因此需要累加起来,方便去除运动畸变,这里用的雷达为一次发布360°的point,因此可以设定为1 TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 1
4.2、配置urdf文件:这里仅使用了一个激光雷达,注意IMU和lidar的link name和前面已运行的设备frame id对应起来
<robot name="cartographer_backpack_3d"> <material name="orange"> <color rgba="1.0 0.5 0.2 1" /> material> <material name="gray"> <color rgba="0.2 0.2 0.2 1" /> material> <link name="imu_link"> <visual> <origin xyz="0.0 0.0 0.0" /> <geometry> <box size="0.06 0.04 0.02" /> geometry> <material name="orange" /> visual> link> <link name="laser_link"> <visual> <origin xyz="0.0 0.0 0.0" /> <geometry> <cylinder length="0.07" radius="0.05" /> geometry> <material name="gray" /> visual> link> <link name="base_link" /> <joint name="imu_link_joint" type="fixed"> <parent link="base_link" /> <child link="imu_link" /> <origin xyz="0 0 0" rpy="0 0 0" /> joint> <joint name="laser_link_joint" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0. 0. -0.0475" rpy="0. 0. 0." /> joint> robot>
4.3、配置launch文件:这里使用offline节点或online节点都可以,offline节点可以建图,因此使用offline节点
<launch> <param name="/use_sim_time" value="true" /> <node name="rviz" pkg="rviz" type="rviz" required="true" args="-d $(find cartographer_ros)/configuration_files/demo_3d.rviz" /> <node name="cartographer_offline_node" pkg="cartographer_ros" type="cartographer_offline_node" args=" -configuration_directory $(find cartographer_ros)/configuration_files -configuration_basenames my_robot_3d.lua -urdf_filenames $(find cartographer_ros)/urdf/my_robot_3d.urdf -bag_filenames $(arg bag_filenames)" output="screen"> <remap from="/points2" to="/rfans_driver/rfans_points" /> <remap from="/imu" to="/imu/data_raw" /> node> <node name="cartographer_occupancy_grid_node" pkg="cartographer_ros" type="cartographer_occupancy_grid_node" args="-resolution 0.05" /> launch>
5、查看地图:上面修改的文件,如果是修改的/catkin_ws/src下的文件,需要rebuild,编译完成之后应该就可以运行自己录制的bag包了,也可以使用cartographer提供的check工具check一下bag包,通常情况下都没有问题,警告可以忽略
使用assets_writer_backpack_3d.launch可以将地图可视化,具体的配置方法和上面一样,通常也是lua文件和urdf文件配置,需要注意的是,如果想查看3D点云地图,需要安装points_cloud_viewer,同时在lua文件中增加如下语句:
{ action = "write_ply", filename = "points.ply", }, -- { -- action = "color_points", -- frame_id = "horizontal_vlp16_link", --因为没有这两个frame id,所以应该改为自己的frame id -- color = { 255., 0., 0. }, -- }, -- { -- action = "color_points", -- frame_id = "vertical_vlp16_link", -- color = { 0., 255., 0. }, -- },
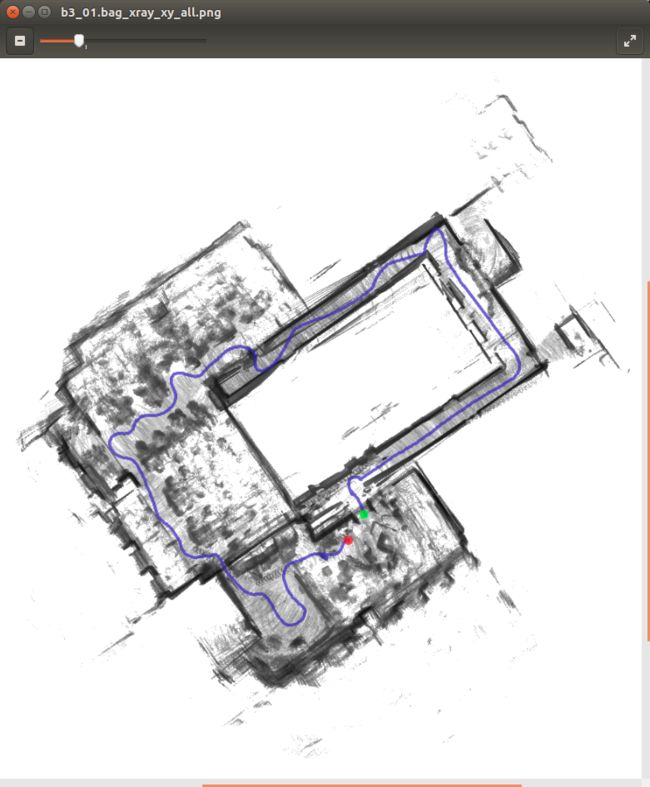
运行相应的launch文件后,可以得到地图和轨迹的图片和点云: