1.什么是图
图表示”多对多”的关系
包含
一组顶点:通常用 V(Vertex)表示顶点集合
一组边:通常用 E(Edge)表示边的集合
边是顶点对:(v,w)∈ E,其中 v,w ∈ V ,v—w
有向边
不考虑重边和自回路
常见术语
无向图:图中所有的边无所谓方向
有向图:图中的边可能是双向,也可能是单向的,方向是很重要的
权值:给图中每条边赋予的值,可能有各种各样的现实意义
网络:带权值的图
邻接点:有边直接相连的顶点
出度:从某顶点发出的边数
入度:指向某顶点的边数
稀疏图:顶点很多而边很少的图
稠密图:顶点多边也多的图
完全图:对于给定的一组顶点,顶点间都存在边
抽象数据类型定义
类型名称:图(Graph)
数据对象集:G(V,E)由一个非空的有限顶点集合 V 和一个有限边集合 E 组成
操作集:对于任意图 G ∈ Graph,以及 v ∈ V,e ∈ E
主要操作有:
Graph Crate():建立并返回空图
Graph InsertVertex(Graph G,Vertex v):将 v 插入 G
Graph InsertEdge(Graph G,Edge e):将 e 插入 G
void DFS(Graph G,Vertex v):从顶点 v 出发深度优先遍历图 G
void BFS(Graph G,Vertex v):从顶点 v 出发宽度优先遍历图 G
2.图的存储结构表示
2.1邻接矩阵表示
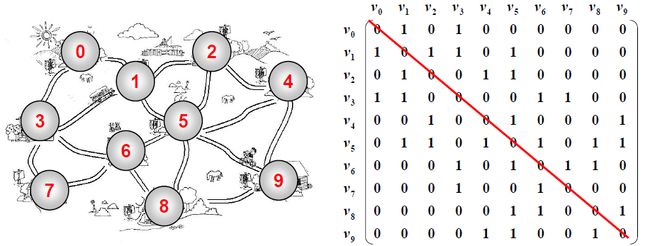
邻接矩阵 G[N][N]——N 个顶点从 0 到 N-1 编号
存在边
特征:
对角线元素全 0
关于对角线对称
优点:
直观、简单、好理解
方便检查任意一对顶点间是否存在边
方便找任一顶点的所有邻接点
方便计算任一顶点的度
无向图:对应行(或列)非 0 元素的个数
有向图:对应行非 0 元素的个数是出度;对应列非 0 元素的个数是入度
缺点:
浪费空间——存稀疏图
浪费时间——统计稀疏图的边
代码实现
#include
#include
#define MaxVertexNum 100
typedef int weightType;
typedef int Vertex;
typedef int DataType;
typedef struct GNode *ptrToGNode;
struct GNode{ // 图
int Nv; // 顶点数
int Ne; // 边数
weightType G[MaxVertexNum][MaxVertexNum];
DataType Data[MaxVertexNum]; // 存顶点的数据
};
typedef ptrToGNode MGraph;
typedef struct ENode *ptrToENode;
struct ENode{ // 边
Vertex V1,V2; // 有向边
weightType Weight; // 权重
};
typedef ptrToENode Edge;
// 初始化图
MGraph Create(int VertexNum){
Vertex v,w;
MGraph Graph;
Graph = (MGraph)malloc(sizeof(struct GNode));
Graph->Nv = VertexNum;
Graph->Ne = 0;
for(v=0;vG[v][w] = 0;
return Graph;
}
// 插入边
MGraph Insert(MGraph Graph,Edge E){
// 插入边
Graph->G[E->V1][E->V2] = E->Weight;
// 如果是无向图,还需要插入边
Graph->G[E->V2][E->V1] = E->Weight;
}
// 建图
MGraph BuildGraph(){
MGraph Graph;
Edge E;
Vertex V;
int Nv,i;
scanf("%d",&Nv); // 读入顶点数
Graph = Create(Nv);
scanf("%d",&(Graph->Ne)); // 读入边数
if(Graph->Ne != 0){
E = (Edge)malloc(sizeof(struct ENode));
for(i=0;iNe;i++){
scanf("%d %d %d",&E->V1,&E->V2,&E->Weight); // 读入每个边的数据
Insert(Graph,E);
}
}
return Graph;
}
// 遍历图
void print(MGraph Graph){
Vertex v,w;
for(v=0;vNv;v++){
for(w=0;wNv;w++)
printf("%d ",Graph->G[v][w]);
printf("\n");
}
}
int main(){
MGraph Graph;
Graph = BuildGraph();
print(Graph);
return 0;
} 2.2邻接表实现
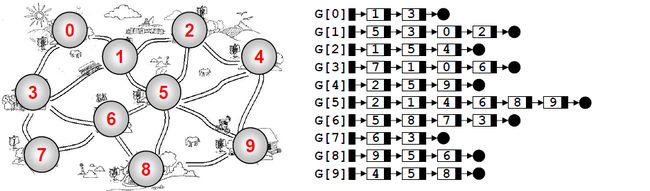
特点:
- 方便找任一顶点的所有邻接顶点
- 节省稀疏图的空间
- 需要 N 个头指针 + 2E 个结点(每个结点至少 2 个域)
- 对于是否方便计算任一顶点的度
- 无向图:方便
- 有向图:只能计算出度
- 不方便检查任意一对顶点间是否存在边
代码实现
#include
#include
#define MaxVertexNum 100
typedef int Vertex;
typedef int DataType;
typedef int weightType;
typedef struct ENode *ptrToENode;
struct ENode{ // 边
Vertex V1,V2; // 有向边
weightType Weight; // 权重
};
typedef ptrToENode Edge;
typedef struct AdjVNode *ptrToAdjVNode;
struct AdjVNode{ // 邻接表内元素
Vertex AdjV; // 邻接点下标
weightType Weight; // 权值
ptrToAdjVNode Next; // 下一个
};
typedef struct VNode{ // 邻接表头
ptrToAdjVNode FirstEdge; // 存每个顶点指针
DataType Data; // 顶点数据
}AdjList[MaxVertexNum];
typedef struct GNode *ptrToGNode;
struct GNode{ // 图
int Nv; // 顶点
int Ne; // 边数
AdjList G; // 邻接表
};
typedef ptrToGNode LGraph;
// 初始化
LGraph create(int VertexNum){
Vertex v,w;
LGraph Graph;
Graph = (LGraph)malloc(sizeof(struct GNode));
Graph->Nv = VertexNum; // 初始化边
Graph->Ne = 0; // 初始化点
// 每条边的 FirstEdge 指向 NULL
for(v=0;vNv;v++)
Graph->G[v].FirstEdge = NULL;
return Graph;
}
// 插入一条边到邻接表的顶点指针之后
void InsertEdge(LGraph Graph,Edge E){
ptrToAdjVNode newNode;
/**************** 插入边 ******************/
// 为 V2 建立新的结点
newNode = (ptrToAdjVNode)malloc(sizeof(struct AdjVNode));
newNode->AdjV = E->V2;
newNode->Weight = E->Weight;
// 将 V2 插入到邻接表头
newNode->Next = Graph->G[E->V1].FirstEdge;
Graph->G[E->V1].FirstEdge = newNode;
/*************** 若为无向图,插入边 *************/
newNode = (ptrToAdjVNode)malloc(sizeof(struct AdjVNode));
newNode->AdjV = E->V1;
newNode->Weight = E->Weight;
newNode->Next = Graph->G[E->V2].FirstEdge;
Graph->G[E->V2].FirstEdge = newNode;
}
// 建图
LGraph BuildGraph(){
LGraph Graph;
Edge E;
Vertex V;
int Nv,i;
scanf("%d",&Nv);
Graph = create(Nv);
scanf("%d",&(Graph->Ne));
if(Graph->Ne != 0){
for(i=0;iNe;i++){
E = (Edge)malloc(sizeof(struct ENode));
scanf("%d %d %d",&E->V1,&E->V2,&E->Weight);
InsertEdge(Graph,E);
}
}
return Graph;
}
// 打印
void print(LGraph Graph){
Vertex v;
ptrToAdjVNode tmp;
for(v=0;vNv;v++){
tmp = Graph->G[v].FirstEdge;
printf("%d ",v);
while(tmp){
printf("%d ",tmp->AdjV);
tmp = tmp->Next;
}
printf("\n");
}
}
int main(){
LGraph Graph;
Graph = BuildGraph();
print(Graph);
return 0;
} 3.图的遍历
3.1深度优先搜索DFS
void DFS ( Vertex V ){
visited[ V ] = true;
for ( V 的每个邻接点 W )
if( !visited[ W ])
DFS( W );
}3.2广度优先搜索BFS
void BFS( Vertex V ){
queue q;
visited[V] = true;
q.push(V);
while(!q.empty()){
V = q.front(); q.pop();
for( V 的每个邻接点 W ){
if( !visited[ W ]){
visited[W] = true;
q.push(W);
}
}
}
}