1 概述
init是一个进程,确切地说,它是Linux系统中用户空间的第一个进程。由于Android是基于Linux内核的,所以init也是Android系统中用户空间的第一个进程,它的进程号是1
职责:
- init进程负责创建系统中的几个关键进程,尤其是Zygote,它更是Java世界的开创者。
- Android系统有很多属性,于是init就提供了一个propertyService(属性服务)来管理它们。
2 init分析
init进程入口:
system/core/init/init.cpp
int main(int argc, char** argv) {
// Get the basic filesystem setup we need put together in the initramdisk
// on / and then we'll let the rc file figure out the rest.
if (is_first_stage) {
...
//创建一些文件夹
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
//挂载linux系统文件
mount("devpts", "/dev/pts", "devpts", 0, NULL);
...
early_mount();
}
//重定向标准输入,标准输出,标准错误输出到 /dev/null
InitKernelLogging(argv);
if (!is_first_stage) {
// Indicate that booting is in progress to background fw loaders, etc.
//在/dev目录创建一个空文件.booting来表示正在执行初始化
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
//初始化和属性相关的资源
property_init();
// If arguments are passed both on the command line and in DT,properties set in DT always have priority over the command-line ones.
process_kernel_dt();
process_kernel_cmdline();
// Propagate the kernel variables to internal variables
//将内核变量设置到内部变量
// used by init as well as the current required properties.
export_kernel_boot_props();
}
// Set up SELinux, including loading the SELinux policy if we're in the kernel domain.
//加载SELinux策略, 后面有一些初始化文件上下文的操作等
selinux_initialize(is_first_stage);
...
//初始化子进程退出的信号处理过程
signal_handler_init();
//加载/default.prop文件
property_load_boot_defaults();
export_oem_lock_status();
//启动属性服务器(通过socket通信)
start_property_service();
set_usb_controller();
//为Action设置处理函数
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
//解析init.rc文件
Parser& parser = Parser::GetInstance();
//设置对应的解析函数 “service”块以关键字“service”开始,表示启动某个进程的方式和参数
parser.AddSectionParser("service",std::make_unique());
//“action”块以关键字“on”开始,表示一堆命令的集合
parser.AddSectionParser("on", std::make_unique());
//“import”是用来引入一个init配置文件,来扩展当前配置的
parser.AddSectionParser("import", std::make_unique());
parser.ParseConfig("/init.rc");
//actionManager
ActionManager& am = ActionManager::GetInstance();
am.QueueEventTrigger("early-init"); //earkay-init trigger
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
am.QueueBuiltinAction(keychord_init_action, "keychord_init");
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
am.QueueEventTrigger("init"); // init trigger
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
// Don't mount filesystems or start core system services in charger mode.充电模式下不加载系统服务
std::string bootmode = property_get("ro.bootmode");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
//判断是否有事件需要处理
if (!waiting_for_exec) {
//依次执行每个action中携带command对应的执行函数
am.ExecuteOneCommand();
//重启一些挂掉的进程
restart_processes();
}
//以下决定timeout的时间,将影响while循环的间隔
int timeout = -1;
//有进程需要重启时,等待该进程重启
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
//有action待处理,不等待
if (am.HasMoreCommands()) {
timeout = 0;
}
//bootchart_sample应该是进行性能数据采样
bootchart_sample(&timeout);
epoll_event ev;
//没有事件到来的话,最多阻塞timeout时间
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, timeout));
if (nr == -1) {
PLOG(ERROR) << "epoll_wait failed";
} else if (nr == 1) {
//有事件到来,执行对应处理函数
//根据上文知道,epoll句柄(即epoll_fd)主要监听子进程结束,及其它进程设置系统属性的请求。
((void (*)()) ev.data.ptr)();
}
}
}
Android在init过程中分别挂载了tmpfs,devpts,proc,sysfs这4类文件系统。
2.1 配置文件解析
system/core/rootdir/init.rc
其中init.rc文件在Android系统运行过程中用于通用的环境设置与进程相关的定义,init.{hardware}.rc(例如,高通有init.qcom.rc,MTK有init.mediatek.rc)用于定义Android在不同平台下的特定进程和环境设置等。此处解析函数传入的参数为“/init.rc”,解析的是运行时与init进程同在根目录下的init.rc文件。
主要有两部分:
- on
on
Action其实就是一序列的Commands。Action都有一个trigger,它被用于决定action的执行时间。当一个符合action触发条件的事件发生时,action会被加入到执行队列的末尾。
队列中的每一个action都会被提取出,而这个action中的每个command都将被依次执行。Init在这些命令的执行期间还控制着其他的活动
on early-init
//Set init and its forked children's oom_adj.
write /proc/1/oom_score_adj -1000
...
start ueventd
- service
service[ ]*
Services是一个程序,他在初始化时启动,并在退出时重启(可选)。
service ueventd /sbin/ueventd
class core
critical
seclabel u:r:ueventd:s0
借助系统环境变量或Linux命令,on列表用于创建所需目录,以及为某些特定文件指定权限,而服务列表用来记录init进程需要启动的一些子进程。如上面代码所示,service关键字后的第一个字符串表示服务(子进程)的名称,第二个字符串表示服务的执行路径。
2.1.1 解析init.rc
system/core/inti/inti_pareser.cpp
bool Parser::ParseConfig(const std::string& path) {
if (is_dir(path.c_str())) {
return ParseConfigDir(path);
}
//init.cpp中传入的是"/init.rc"是文件
return ParseConfigFile(path);
}
Parser::ParseConfigFile(const std::string& path) {
Timer t;
std::string data;
//读取指定文件的内容,以string保存
if (!read_file(path.c_str(), &data)) {
return false;
}
...
ParseData(path, data);
...
}
Parser::ParseData(const std::string& filename, const std::string& data)根据关键字解析出服务和动作。动作与服务会分别放在了Action::ActionManager.actions_和Service::ServiceManager.services_中
bool Parser::ParseConfig(const std::string& path) {
if (is_dir(path.c_str())) {
return ParseConfigDir(path);
}
//init.cpp中传入的是"/init.rc"是文件
return ParseConfigFile(path);
}
Parser::ParseConfigFile(const std::string& path) {
Timer t;
std::string data;
//读取指定文件的内容,以string保存
if (!read_file(path.c_str(), &data)) {
return false;
}
...
ParseData(path, data);
...
}
Parser::ParseData(const std::string& filename, const std::string& data)根据关键字解析出服务和动作。动作与服务会分别放在了Action::ActionManager.actions_和Service::ServiceManager.services_中
void Parser::ParseData(const std::string& filename, const std::string& data) {
std::vector data_copy(data.begin(), data.end());
data_copy.push_back('\0');
parse_state state;
...
SectionParser* section_parser = nullptr;
std::vector args;
for (;;) {
//next_token以行为单位分割参数传递过来的字符串
//最先走到T_TEXT分支
switch (next_token(&state)) {
case T_EOF:
if (section_parser) {
//EOF,解析结束
section_parser->EndSection();
}
return;
case T_NEWLINE:
state.line++;
if (args.empty()) {
break;
}
//在init.cpp::main()创建parser时,为service,on,import定义了对应的parser
//这里就是根据第一个参数,判断是否有对应的parser
if (section_parsers_.count(args[0])) {
if (section_parser) {
//结束上一个parser的工作,将构造出的对象加入到对应的service_list与action_list中
section_parser->EndSection();
}
//获取参数对应的parser
section_parser = section_parsers_[args[0]].get();
std::string ret_err;
//调用实际parser的ParseSection函数
if (!section_parser->ParseSection(args, &ret_err)) {
parse_error(&state, "%s\n", ret_err.c_str());
section_parser = nullptr;
}
} else if (section_parser) {
//如果第一个参数不是service,on,import
//则调用前一个parser的ParseLineSection函数
//这里相当于解析一个参数块的子项
std::string ret_err;
if (!section_parser->ParseLineSection(args, state.filename,state.line, &ret_err)) {
parse_error(&state, "%s\n", ret_err.c_str());
}
}
args.clear();
break;
case T_TEXT:
//将本次解析的内容写入到args中
args.emplace_back(state.text);
break;
}
}
}
2.1.2 解析Service
system/core/init/service.cpp
从上面代码可知解析init.rc时section_parser->ParseSection(args, &ret_err)来接解析,在之前为每种section都设置了解析函数,service对应的解析函数就service.cpp::ServiceParser::ParseSection(onst std::vector
bool ServiceParser::ParseSection(const std::vector& args,std::string* err) {
...
const std::string& name = args[1];
...
//service section 对应为"service ueventd /sbin/ueventd...",下面就是讲name后的参数全部放在一个vector中
std::vector str_args(args.begin() + 2, args.end());
//构造一个service对象
service_ = std::make_unique(name, "default", str_args);
return true;
}
在解析将一个section解析结束后会调用ServiceParser::EndSection()
void ServiceParser::EndSection() {
if (service_) {
ServiceManager::GetInstance().AddService(std::move(service_));
}
}
//
void ServiceManager::AddService(std::unique_ptr service) {
Service* old_service = FindServiceByName(service->name());
if (old_service) {
return;
}
//添加到services_中 (`ServicePaser::ServiceManager`中的一个vector)
services_.emplace_back(std::move(service));
}
2.1.3 解析action
ActionParser定义于system/core/init/action.cpp中。Action的解析过程,其实与Service差不多
//解析 on
bool ActionParser::ParseSection(const std::vector& args, std::string* err) {
std::vector triggers(args.begin() + 1, args.end());
...
auto action = std::make_unique(false);
//根据参数,填充action的trigger域
if (!action->InitTriggers(triggers, err)) {
return false;
}
action_ = std::move(action);
return true;
}
//解析
bool ActionParser::ParseLineSection(const std::vector& args, const std::string& filename, int line, std::string* err) const {
return action_ ? action_->AddCommand(args, filename, line, err) : false;
}
bool Action::AddCommand(const std::vector& args,const std::string& filename, int line, std::string* err) {
...
//找出action对应的执行函数
auto function = function_map_->FindFunction(args[0], args.size() - 1, err);
...
AddCommand(function, args, filename, line);
return true;
}
//构造出command,加入到action对象的commands_中
void Action::AddCommand(BuiltinFunction f,const std::vector& args, const std::string& filename, int line) {
commands_.emplace_back(f, args, filename, line);
}
//完成一次action解析
void ActionParser::EndSection() {
if (action_ && action_->NumCommands() > 0) {
ActionManager::GetInstance().AddAction(std::move(action_));
}
}
2.1.4 init控制service
启动zygote
在action为 on late-init中会执行 triger boot,on boot下有个class_start core 的commond,对应的处理函数式Builtins::do_class_start(const std::vector
system/core/init/Builtins.cpp
static int do_class_start(const std::vector& args) {
/* Starting a class does not start services
* which are explicitly disabled. They must
* be started individually.
*/
//传递一个匿名函数,在找到对应的service后执行StartIfNotDisabled()
ServiceManager::GetInstance().ForEachServiceInClass(args[1], [] (Service* s) { s->StartIfNotDisabled(); });
return 0;
}
//init.${zygote}.rc中 zygote class main
//以下在/system/core/init/service.cpp中
void ServiceManager::ForEachServiceInClass(const std::string& classname, void (*func)(Service* svc)) const {
for (const auto& s : services_) {
if (classname == s->classname()) {
func(s.get());
}
}
}
bool Service::StartIfNotDisabled() {
if (!(flags_ & SVC_DISABLED)) {
return Start();
} else {
flags_ |= SVC_DISABLED_START;
}
return true;
}
bool Service::Start() {
...
//已经在运行了,不处理
if (flags_ & SVC_RUNNING) {
return false;
}
...
//判断可执行文件是否存在
//zygote对应的可执行文件是/system/bin/app_process
if (stat(args_[0].c_str(), &sb) == -1) {
flags_ |= SVC_DISABLED;
return false;
}
...
//fork 子进程
if (namespace_flags_) {
...
} else {
pid = fork();
}
if (pid == 0) {
//pid为零,我们在子进程中
//添加环境变量信息
for (const auto& ei : envvars_) {
add_environment(ei.name.c_str(), ei.value.c_str());
}
//创建sokcet
CreateSockets(scon);
//设置一些参数,uid,gid,写入文件等
...
/*执行/system/bin/app_process,这样就进入到app_process的main函数中了。fork、execve这两个函数都是Linux系统上常用的系统调用。*/
if (execve(strs[0], (char**) &strs[0], (char**) ENV) < 0) {
...
}
}
//父进程init的处理,设置service信息,如启动时间进程号,以及状态等
...
}
fork,execve拓展阅读
linux c语言 fork() 和 exec 函数的简介和用法
Linux下Fork与Exec使用
重启zygote
2.1.5 注册子进程信号处理器
signal_handler_init()次函数在解析init.rc前先被调用。
system/core/init/Signal_Handler.cpp
void signal_handler_init() {
// Create a signalling mechanism for SIGCHLD.
int s[2];
//通过socketpair创建两个socket,分别负责读写
if (socketpair(AF_UNIX, SOCK_STREAM | SOCK_NONBLOCK | SOCK_CLOEXEC, 0, s) == -1) {
... //失败,退出
}
signal_write_fd = s[0];
signal_read_fd = s[1];
// Write to signal_write_fd if we catch SIGCHLD.
struct sigaction act;
memset(&act, 0, sizeof(act));
//设置处理处理信号为"SIGCHLD"的消息的函数
act.sa_handler = SIGCHLD_handler;
act.sa_flags = SA_NOCLDSTOP;
//信号注册,将监听及对应的信号处理注册到内核
sigaction(SIGCHLD, &act, 0);
ServiceManager::GetInstance().ReapAnyOutstandingChildren();
register_epoll_handler(signal_read_fd, handle_signal);
}
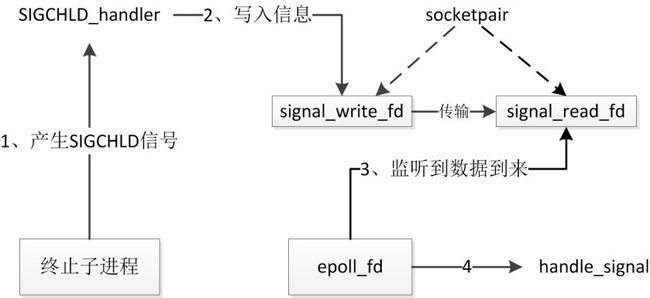
sigaction注册到内核,监听SIGCHLD信号,交由SIGCHLD_handler处理,SIGCHLD_handler通过signal_wirte_fd写入信息
//[system/core/init/Signal_Handler.cpp]
static void SIGCHLD_handler(int) {
if (TEMP_FAILURE_RETRY(write(signal_write_fd, "1", 1)) == -1)
...
}
sinal_read_fd和signal_wirte_fd是一组,所以sinal_read_fd能接收到write的信息,在signal_handler_init的最后调用了register_epoll_handler(signal_read_fd, handle_signal)来注册处理signal_read_fd的处理函数,为handle_signal()
//[system/core/init/init.cpp]
void register_epoll_handler(int fd, void (*fn)()) {
epoll_event ev;
ev.events = EPOLLIN;
ev.data.ptr = reinterpret_cast(fn);
//epoll_fd增加一个监听对象fd,fd上有数据到来时,调用fn处理
if (epoll_ctl(epoll_fd, EPOLL_CTL_ADD, fd, &ev) == -1)
...
}
//[system/core/init/Signal_handler.cpp]
static void handle_signal() {
// Clear outstanding requests.
char buf[32];
read(signal_read_fd, buf, sizeof(buf));
//调用ReapAnyOutstandingChildren做真正的子线程处理
ServiceManager::GetInstance().ReapAnyOutstandingChildren();
}
//[system/core/init/service.cpp]
void ServiceManager::ReapAnyOutstandingChildren() {
while (ReapOneProcess()) {
}
}
bool ServiceManager::ReapOneProcess() {
int status;
//用waitpid函数获取状态发生变化的子进程pid
//waitpid的标记为WNOHANG,即非阻塞,返回为正值就说明有进程挂掉了
pid_t pid = TEMP_FAILURE_RETRY(waitpid(-1, &status, WNOHANG));
if (pid == 0) return false;
else if (pid == -1) return false;
...
//利用FindServiceByPid函数,找到pid对应的服务。
Service* svc = FindServiceByPid(pid);
//调用Reap()处理,判断service是否需要移除
if (svc->Reap()) {
waiting_for_exec = false;
//移除服务
RemoveService(*svc);
}
return true;
}
bool Service::Reap() {
//清理未携带SVC_ONESHOT 或 携带了SVC_RESTART标志的子进程
if (!(flags_ & SVC_ONESHOT) || (flags_ & SVC_RESTART){
KillProcessGroup(SIGKILL);
}
// Remove any sockets we may have created.
//移除service中创建的socket
for (const auto& si : sockets_) {
unlink(tmp.c_str());
}
...
pid_ = 0;
flags_ &= (~SVC_RUNNING);
// Oneshot processes go into the disabled state on exit,
// except when manually restarted.
//对于携带了SVC_ONESHOT并且未携带SVC_RESTART的service,将这类服务的标志置为SVC_DISABLED,不再启动
if ((flags_ & SVC_ONESHOT) && !(flags_ & SVC_RESTART)) {
flags_ |= SVC_DISABLED;
}
// Disabled and reset processes do not get restarted automatically.
if (flags_ & (SVC_DISABLED | SVC_RESET)) {
NotifyStateChange("stopped");
return false;
}
time_t now = gettime();
//未携带SVC_RESTART的SVG_CRITICAL(重要的)服务,在规定的间隔内,crash字数过多时,会导致整机重启;
if ((flags_ & SVC_CRITICAL) && !(flags_ & SVC_RESTART)) {
if (time_crashed_ + CRITICAL_CRASH_WINDOW >= now) {
if (++nr_crashed_ > CRITICAL_CRASH_THRESHOLD) {
android_reboot(ANDROID_RB_RESTART2, 0, "recovery");
return false;
}
} else {
time_crashed_ = now;
nr_crashed_ = 1;
}
}
//将待重启service的标志位置为SVC_RESTARTING(init进程将根据该标志位,重启服务)
flags_ &= (~SVC_RESTART);
flags_ |= SVC_RESTARTING;
// Execute all onrestart commands for this service.
//执行在init.rc文件中service下面所有onrestart选项
onrestart_.ExecuteAllCommands();
NotifyStateChange("restarting");
return false;
}
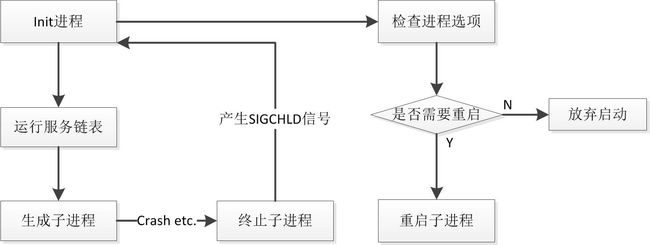
被标记为SVC_RESTARTING的service将在init中的restart_processes()中重启,所以zygote能在此被重启
流程可简化为:
2.1.6 总结
整体流程和《深入理解Android卷I》是一样的,只是更好的面向对象去处理,封装更好。还有就是I/O方式变了,epoll更加灵活,没有描述符限制,更多可参考
IO多路复用之epoll总结
Linux IO模式及 select、poll、epoll详解
2.2 属性服务
2.2.1 初始化
在Init.cpp的main函数中执行了property_init()进行初始化
//[system/core/init/Property_service.cpp]
void property_init() {
if (__system_property_area_init()) {
exit(1);
}
}
//[bionic/libc/inlcude/System_properties.cpp]
int __system_property_area_init()
{
free_and_unmap_contexts();
mkdir(property_filename, S_IRWXU | S_IRGRP | S_IXGRP | S_IROTH | S_IXOTH);
if (!initialize_properties()) {
return -1;
}
...
//分配内存
if (open_failed || !map_system_property_area(true, &fsetxattr_failed)) {
...
}
initialized = true;
return fsetxattr_failed ? -2 : 0;
}
//[bionic/libc/inlcude/System_properties.cpp]
static bool map_system_property_area(bool access_rw, bool* fsetxattr_failed) {
...
if (access_rw) {
//这里才是真正分配内存的地方,大小为 [128 * 1024]
//prop_area也改为了class
__system_property_area__ = map_prop_area_rw(filename, "u:object_r:properties_serial:s0", fsetxattr_failed);
}
...
return __system_property_area__;
}
在书中说将pa赋值__system_property_area__是为了完成内存共享,这7.0这部分改动很大,有点看不明白,大致流程和卷一的流程是一样的。网上这部分的资料也没找到,还有就是property_init()是在!is_first_stage情况下执行的,那么property_load_boot_defaults()第一次执行加载的放在哪里?希望有前辈指教。
不过好像也不影响我们理解:创建一个文件句柄,分配一个匿名共享内存区用于存放属性.
2.2.2 启动属性服务
在执行property_load_boot_defaults(),Init.cpp::main中接着执行了start_property_service()
//[system/core/init/Property_service.cpp]
void start_property_service() {
//创建socket
property_set_fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK,0666, 0, 0, NULL);
...
listen(property_set_fd, 8);
//注册处理函数
register_epoll_handler(property_set_fd, handle_property_set_fd);
}
在Init::main()在的最后又这么一段断码,通过取出注册的处理函数,然后处理消息。
epoll_event ev;
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, timeout));
...
else if (nr == 1) {
((void (*)()) ev.data.ptr)();
}
所以响应设置属性的请求就在handle_property_set_fd()中执行。
2.2.3 处理属性设置
//[system/core/init/Property_service.cpp]
static void handle_property_set_fd()
{
...
//接受连接
int s = accept(property_set_fd, nullptr, nullptr);
...
//取出客户端进程的权限等
if (getsockopt(s, SOL_SOCKET, SO_PEERCRED, &cr, &cr_size) < 0)
...
//接受请求数据
r = TEMP_FAILURE_RETRY(recv(s, &msg, sizeof(msg), MSG_DONTWAIT));
switch(msg.cmd) {
case PROP_MSG_SETPROP:
msg.name[PROP_NAME_MAX-1] = 0;
msg.value[PROP_VALUE_MAX-1] = 0;
...
//如果是ctl开头的消息,则认为是控制消息,控制消息用来执行一些命令,例如用adb shell登录后,输入setprop ctl.start bootanim就可以查看开机动画了,关闭的话就输入setpropctl.stop bootanim
if(memcmp(msg.name,"ctl.",4) == 0) {
// Keep the old close-socket-early behavior when handling
// ctl.* properties.
close(s);
if (check_control_mac_perms(msg.value, source_ctx, &cr)) {
handle_control_message((char*) msg.name + 4, (char*) msg.value);
}
...
}else {
//检查客户端进程是否有足够的权限
if (check_mac_perms(msg.name, source_ctx, &cr)) {
//设置属性
property_set((char*) msg.name, (char*) msg.value);
}
...
}
...
}
//设置
int property_set(const char* name, const char* value) {
int rc = property_set_impl(name, value);
...
return rc;
}
static int property_set_impl(const char* name, const char* value) {
//更具不同的属性名称进行各种处理
...
//这个函数将触发 init.rc中的trigger 以执行command
/*
on property:persist.service.adb.enable=1
start adb
当persist.service.adb.enable属性置为1后,就会执行start adbd这个command,这是通过property_changed函数来完成的
*/
property_changed(name, value);
return 0;
}
2.2.4 客户端发送设置请求
客户端通过property_set发送请求,property_set由libcutils库提供
//[system/core/libcutils/Properties.c]
int property_set(const char *key, const char *value)
{
return __system_property_set(key, value);
}
//[bionic/libc/System_properties.cpp]
int __system_property_set(const char *key, const char *value)
{
...
const int err = send_prop_msg(&msg);
...
}
//[bionic/libc/System_properties.cpp]
static int send_prop_msg(const prop_msg *msg){
...
sockaddr_un addr;
memset(&addr, 0, sizeof(addr));
strlcpy(addr.sun_path, property_service_socket, sizeof(addr.sun_path));
addr.sun_family = AF_LOCAL;
socklen_t alen = namelen + offsetof(sockaddr_un, sun_path) + 1;
//建立和属性服务器的socket连接
if (TEMP_FAILURE_RETRY(connect(fd, reinterpret_cast(&addr), alen)) < 0) {
close(fd);
return -1;
}
//通过socket发送出去
const int num_bytes = TEMP_FAILURE_RETRY(send(fd, msg, sizeof(prop_msg), 0));
}
3 总结
总体来说流程和原书是一致的,只是在实现采用了面向对象,通信方式也采用了更加高效的方式,加入了SELinux的东西,对属性初始化那一部分还有点迷惑。但是更具原书的流程走,也不是很费力。其中的一些细节,后面再去填坑。
感谢以下博文的帮助:
Android系统启动-init篇
Android7.0 init进程源码分析
Android的init进程启动过程
上一篇 《第二章 - JNI》读书笔记
上一篇 《第四章 - Zygote》读书笔记