这一节将来总结关于SLAM构建地图的相关知识,从具体的场景来写,然后对于用到的知识将会详细补充。
在构建地图时用到的launch文件是exploring_slam_demo,首先是他的代码部分:
很容易看出是由三部分组成,以下分三块来讲
一 gmapping.launch文件
路径:mbot_navigation/launch
代码:
//启动slam的节点
//地图更新的频率,两次scanmatch的间隔,地图更新也受scanmach的影响,如果scanmatch没有成功的话,是不会更新地图的
// 传感器的最大范围。如果传感器范围内没有障碍物的区域在地图中显示为自由空间,则设置maxUrange <实际传感器的最大范围<= maxRange。
// //set maxUrange < maximum range of the real sensor <= maxRange 激光的最大可用范围。光束被裁剪为该值。
// 内核中要查找一个对应关系
//optimize机器人移动的初始值(距离)
// optimize机器人移动的初始值(角度)
////icp的迭代次数
//用于计算的波束可能性的sigma
//在评估可能性时使用的增益,用于平滑重采样效果
////为0,表示所有的激光都处理,尽可能为零,如果计算压力过大,可以改成1
//作为平移函数的平移误差(rho / rho)
//作为旋转的函数的平移误差(rho / theta)
//作为平移函数的旋转中的测量误差(θ/ rho)
// 作为旋转的函数的旋转中的测量误差(θ/θ)
////机器人移动linearUpdate距离,进行scanmatch(每次[机器人翻译远处时,处理一次扫描)
//机器人选装angularUpdate角度,进行scanmatch (俗话说:每次机器人旋转这么远时处理一次扫描)
//如果上次扫描处理的时间早于更新时间(秒),则处理扫描。小于零的值将关闭基于时间的更新。
//基于Neff的重采样阈值
//很重要,粒子个数
//map初始化的大小
//初始地图大小Y最小值
// 初始地图大小X最大值
//初始地图大小Y最大值
//地图的分辨率
//可能性的平移采样范围
// 可能性的平移采样步骤
//角度采样范围的可能性
//角度采样步骤的可能性
上面的注释来源于:gmapping介绍及参数说明
使用slam_gmapping节点,需要移动机器人提供里程计数据,并且机器人配备有固定激光测距仪。slam_gmapping节点将每个传入的扫描转化为odom(里程计)TF框架,可以参照:TF参照
节点:
- slam_gmapping
该slam_gmapping节点发生在sensor_msgs /激光扫描信息,并建立一个映射(nav_msgs / OccupancyGrid)。可以通过ROS 主题或服务检索地图。 - 订阅主题
- tf(tf / tfMessage)
需要进行激光,基准和测距的相关框架转换- scan (sensor_msgs / LaserScan)
激光扫描从中创建地图
- 发布主题
- scan (sensor_msgs / LaserScan)
激光扫描从中创建地图- map(nav_msgs / OccupancyGrid)
从此主题获取地图数据,将其锁定并定期更新- 〜entropy (std_msgs / Float64)
机器人姿态分布的熵的估计值(较高的值表示较大的不确定性)。
- 服务
dynamic_map(nav_msgs / GetMap)
调用此服务以获取地图数据 - 必需的tf转换
- <传入激光数据的框架> → base_link
通常是固定值,由robot_state_publisher或tf static_transform_publisher定期广播。- base_link → odom
通常由里程表系统(例如,移动基座的驱动器)提供,
- 提供tf转换
地图 → odom
在地图框架内的机器人姿势的当前估计
软件包摘要:
这个包包含一个用于OpenSlam的Gmapping的ROS包。gmapping包提供基于激光的SLAM(同时定位和建图),作为称为slam_gmapping的ROS节点。使用slam_gmapping,您可以从移动机器人收集的激光和姿势数据创建2-D占用网格地图(如建筑平面图)。
重要参数说明:
- particles (int, default: 30) gmapping算法中的粒子数,因为gmapping使用的是粒子滤波算法,粒子在不断地迭代更新,所以选取一个合适的粒子数可以让算法在保证比较准确的同时有较高的速度。
- minimumScore (float, default: 0.0) 最小匹配得分,这个参数很重要,它决定了对激光的一个置信度,越高说明对激光匹配算法的要求越高,激光的匹配也越容易失败而转去使用里程计数据,而设的太低又会使地图中出现大量噪声,所以需要权衡调整。(在这个launch文件中没有用到这个参数具体原因还不知道)
二 move_base.launch 文件
路径:mbot_navigation/launch
代码:
路径:mbot_navigation/config/mbot
代码说明:
- costmap_common_params.yaml 代价地图通用配置文件
- global_costmap_params.yaml 全局代价地图配置文件
- local_costmap_params.yaml 本地代价地图配置文件
- base_local_planner_params.yaml 本地规划器配置文件
具体关于每一个问价参照博客;move_base配置参数
关于move_base的说明参照move_base
三 运行rviz
路径:mbot_navigation/rviz
代码:
Panels:
- Class: rviz/Displays
Help Height: 78
Name: Displays
Property Tree Widget:
Expanded:
- /Global Options1
- /RobotModel1/Links1/base_footprint1
- /Pose Array1
Splitter Ratio: 0.652661026
Tree Height: 691
- Class: rviz/Selection
Name: Selection
- Class: rviz/Tool Properties
Expanded:
- /2D Pose Estimate1
- /2D Nav Goal1
Name: Tool Properties
Splitter Ratio: 0.428570986
- Class: rviz/Views
Expanded:
- /Current View1
Name: Views
Splitter Ratio: 0.5
- Class: rviz/Time
Experimental: false
Name: Time
SyncMode: 0
SyncSource: LaserScan
Visualization Manager:
Class: ""
Displays:
- Alpha: 0.5
Cell Size: 0.5
Class: rviz/Grid
Color: 0; 0; 0
Enabled: true
Line Style:
Line Width: 0.0299999993
Value: Lines
Name: Grid
Normal Cell Count: 0
Offset:
X: 0
Y: 0
Z: 0
Plane: XY
Plane Cell Count: 80
Reference Frame: odom
Value: true
- Angle Tolerance: 0.100000001
Class: rviz/Odometry
Covariance:
Orientation:
Alpha: 0.5
Color: 255; 255; 127
Color Style: Unique
Frame: Local
Offset: 1
Scale: 1
Value: true
Position:
Alpha: 0.300000012
Color: 204; 51; 204
Scale: 1
Value: true
Value: true
Enabled: false
Keep: 100
Name: Odometry
Position Tolerance: 0.100000001
Shape:
Alpha: 1
Axes Length: 1
Axes Radius: 0.100000001
Color: 255; 25; 0
Head Length: 0.300000012
Head Radius: 0.100000001
Shaft Length: 1
Shaft Radius: 0.0500000007
Value: Arrow
Topic: /odom
Unreliable: false
Value: false
- Angle Tolerance: 0.100000001
Class: rviz/Odometry
Covariance:
Orientation:
Alpha: 0.5
Color: 255; 255; 127
Color Style: Unique
Frame: Local
Offset: 1
Scale: 1
Value: true
Position:
Alpha: 0.300000012
Color: 204; 51; 204
Scale: 1
Value: true
Value: true
Enabled: false
Keep: 100
Name: Odometry EKF
Position Tolerance: 0.100000001
Shape:
Alpha: 1
Axes Length: 1
Axes Radius: 0.100000001
Color: 255; 25; 0
Head Length: 0.300000012
Head Radius: 0.100000001
Shaft Length: 1
Shaft Radius: 0.0500000007
Value: Arrow
Topic: /odom
Unreliable: false
Value: false
- Alpha: 1
Class: rviz/RobotModel
Collision Enabled: false
Enabled: true
Links:
All Links Enabled: true
Expand Joint Details: false
Expand Link Details: false
Expand Tree: false
Link Tree Style: Links in Alphabetic Order
back_caster_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_footprint:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
base_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
front_caster_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
laser_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
left_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
right_wheel_link:
Alpha: 1
Show Axes: false
Show Trail: false
Value: true
Name: RobotModel
Robot Description: robot_description
TF Prefix: ""
Update Interval: 0
Value: true
Visual Enabled: true
- Alpha: 0.699999988
Class: rviz/Map
Color Scheme: map
Draw Behind: true
Enabled: true
Name: Map
Topic: /map
Unreliable: false
Use Timestamp: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz/Path
Color: 255; 0; 0
Enabled: true
Head Diameter: 0.300000012
Head Length: 0.200000003
Length: 0.300000012
Line Style: Lines
Line Width: 0.0299999993
Name: Local Plan
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.0299999993
Shaft Diameter: 0.100000001
Shaft Length: 0.100000001
Topic: /move_base/TrajectoryPlannerROS/local_plan
Unreliable: false
Value: true
- Alpha: 1
Buffer Length: 1
Class: rviz/Path
Color: 0; 213; 0
Enabled: true
Head Diameter: 0.300000012
Head Length: 0.200000003
Length: 0.300000012
Line Style: Lines
Line Width: 0.0299999993
Name: Global Plan
Offset:
X: 0
Y: 0
Z: 0
Pose Color: 255; 85; 255
Pose Style: None
Radius: 0.0299999993
Shaft Diameter: 0.100000001
Shaft Length: 0.100000001
Topic: /move_base/TrajectoryPlannerROS/global_plan
Unreliable: false
Value: true
- Alpha: 1
Arrow Length: 0.300000012
Axes Length: 0.300000012
Axes Radius: 0.00999999978
Class: rviz/PoseArray
Color: 170; 255; 127
Enabled: true
Head Length: 0.0700000003
Head Radius: 0.0299999993
Name: Pose Array
Shaft Length: 0.230000004
Shaft Radius: 0.00999999978
Shape: Arrow (Flat)
Topic: /particlecloud
Unreliable: false
Value: true
- Alpha: 1
Autocompute Intensity Bounds: true
Autocompute Value Bounds:
Max Value: 0.30399999
Min Value: 0.30399999
Value: true
Axis: Z
Channel Name: intensity
Class: rviz/LaserScan
Color: 255; 0; 0
Color Transformer: FlatColor
Decay Time: 0
Enabled: true
Invert Rainbow: false
Max Color: 255; 255; 255
Max Intensity: 4096
Min Color: 0; 0; 0
Min Intensity: 0
Name: LaserScan
Position Transformer: XYZ
Queue Size: 10
Selectable: true
Size (Pixels): 3
Size (m): 0.00999999978
Style: Points
Topic: /scan
Unreliable: false
Use Fixed Frame: true
Use rainbow: true
Value: true
- Alpha: 1
Axes Length: 1
Axes Radius: 0.100000001
Class: rviz/Pose
Color: 0; 255; 0
Enabled: true
Head Length: 0.100000001
Head Radius: 0.150000006
Name: Goal Pose
Shaft Length: 0.5
Shaft Radius: 0.0299999993
Shape: Arrow
Topic: /move_base_simple/goal
Unreliable: false
Value: true
- Alpha: 0.699999988
Class: rviz/Map
Color Scheme: costmap
Draw Behind: false
Enabled: true
Name: Inflated Obstacles
Topic: /move_base/local_costmap/costmap
Unreliable: false
Use Timestamp: false
Value: true
- Class: rviz/Marker
Enabled: true
Marker Topic: /waypoint_markers
Name: Marker
Namespaces:
{}
Queue Size: 100
Value: true
Enabled: true
Global Options:
Background Color: 0; 0; 0
Default Light: true
Fixed Frame: map
Frame Rate: 30
Name: root
Tools:
- Class: rviz/MoveCamera
- Class: rviz/Interact
Hide Inactive Objects: true
- Class: rviz/Select
- Class: rviz/SetInitialPose
Topic: /initialpose
- Class: rviz/SetGoal
Topic: /move_base_simple/goal
Value: true
Views:
Current:
Angle: -6.3000164
Class: rviz/TopDownOrtho
Enable Stereo Rendering:
Stereo Eye Separation: 0.0599999987
Stereo Focal Distance: 1
Swap Stereo Eyes: false
Value: false
Invert Z Axis: false
Name: Current View
Near Clip Distance: 0.00999999978
Scale: 52.4497948
Target Frame:
Value: TopDownOrtho (rviz)
X: 0.412709981
Y: -2.02176332
Saved: ~
Window Geometry:
Displays:
collapsed: false
Height: 904
Hide Left Dock: false
Hide Right Dock: false
QMainWindow State: 000000ff00000000fd00000004000000000000016a00000342fc0200000005fb0000001200530065006c0065006300740069006f006e00000001e10000009b0000006100fffffffb0000001e0054006f006f006c002000500072006f007000650072007400690065007302000001ed000001df00000198000000a3fb000000120056006900650077007300200054006f006f02000001df000002110000018500000122fb000000200054006f006f006c002000500072006f0070006500720074006900650073003203000002880000011d000002210000017afb000000100044006900730070006c006100790073010000002800000342000000d700ffffff000000010000010f00000270fc0200000003fb0000001e0054006f006f006c002000500072006f00700065007200740069006500730100000041000000780000000000000000fb0000000a00560069006500770073000000002800000270000000ad00fffffffb0000001200530065006c0065006300740069006f006e010000025a000000b200000000000000000000000200000490000000a9fc0100000001fb0000000a00560069006500770073030000004e00000080000002e10000019700000003000004a00000003efc0100000002fb0000000800540069006d00650000000000000004a00000030000fffffffb0000000800540069006d00650100000000000004500000000000000000000004280000034200000004000000040000000800000008fc0000000100000002000000010000000a0054006f006f006c00730100000000ffffffff0000000000000000
Selection:
collapsed: false
Time:
collapsed: false
Tool Properties:
collapsed: false
Views:
collapsed: false
Width: 1432
X: 2298
Y: 239
备注:这一块代码属于建立rviz界面中的控件,添加控件属性,订阅话题。如下图左侧的栏目框:
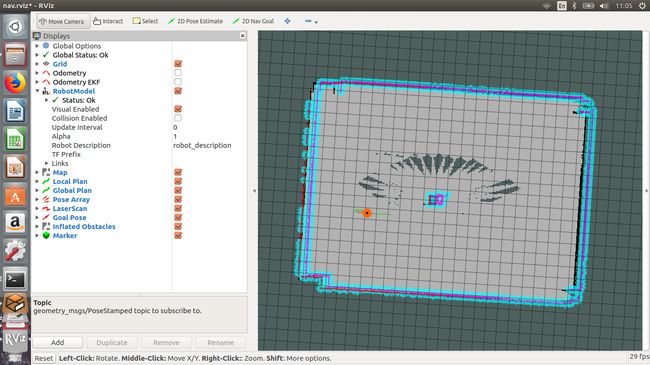
Screenshot from 2019-01-24 11-05-05.png
以上是mbot_navigation功能包三大块。